
Fターム[5H115TB06]の内容
車両の電気的な推進・制動 (204,712) | 速度検出 (3,622) | 速度検出器を設けずに速度検出するもの (29)
Fターム[5H115TB06]に分類される特許
1 - 20 / 29
電動車両制御装置および電動車両制御方法

【課題】外乱の相殺によるドライバの運転負荷の軽減を図るとともに、自然な運転感覚を残しドライバに与える違和感の軽減を図る。
【解決手段】トルク検出手段と、走行速度検出手段と、ドライバによるアクセル操作量およびブレーキ操作量と、走行速度とに基づいて、トルク指示値を生成する制駆動力制御手段1と、トルク検出値がトルク指示値になるようにフィードバック制御を行う電動機制御手段とを備え、制駆動力制御手段は、アクセル操作量およびブレーキ操作量と、走行速度とに基づいて、トルク基本値を算出するトルク基本値演算部11と、走行速度およびトルク検出値に基づいて、変動量の推定値を算出する変動量推定部12と、推定値に基づいてトルク補正値を算出し、トルク基本値に所望量のトルク補正値を加算することでトルク指示値を生成するトルク指示値演算部13とを有する。
(もっと読む)
電動機制御方法及び電動機制御装置

【課題】空転滑走した軸とは異なる他軸における空転滑走の誘発を抑制させ、牽引力増大を図るための新たな方策を提案すること。
【解決手段】監視軸の軸速度Vから基準速度Vmを減算した速度差Vdが予兆時誘発検出閾値Vca以上となったことを検出する(誘発検出)。予兆時誘発検出閾値Vcaは、空転滑走検出閾値Vsより小さい値であり、時刻t5の時点で予兆時誘発検出がなされる。また、再粘着制御において、一旦引き下げた電動機トルクτeをもとのトルク(或いはもとのトルクをもとに定められる目標トルク)に復帰させる際にも、軸重移動が生じて他軸での空転滑走が誘発し得る。そこで、空転滑走を検出した時のトルク分電流から現在のトルク分電流を減算したトルク分電流の差が、復帰直前時誘発検出閾値τcr以下となったことを、他軸における空転発送の誘発可能性ありとして検出する(誘発検出)。
(もっと読む)
インバータ誤動作停止システム
【課題】過去の鉄道事故において、インバータの論理部の誤動作が原因で、論理部が減速指令を受け取れない状態になり、その前に受けていた加速指令を保持し、列車としては減速しようとしているのに、当該インバータが加速を継続し、所望の減速度を得られず事故に至った例があり、インバータ論理部の信頼性向上が必要である。
【解決手段】インバータとは別にインバータ監視装置を設置し、インバータの誤動作を検知したときには、高速度遮断器などの装置を動作させ、主回路を切離すことでインバータの動作を強制的に停止したり、インバータの論理部にリセットをかける等の処理を行うことにより、インバータの誤動作による危険を防止する。
(もっと読む)
電気駆動車両
【課題】坂道において電気駆動車両の発進及び停止を行う時に機械式ブレーキと電動機の協調制御を行うことなく、後退することのない発進及び停止を実現する。
【解決手段】本発明の電気駆動車両は、車輪を制動あるいは駆動するための誘導モータと前記誘導モータを制御する電動機制御器と前記車輪を制動する機械式ブレーキを備え、前記車両が前記機械式ブレーキが作動していない状態で停止している時は前記電動機制御器が前記誘導モータの固定子に直流電圧または−1〜+1Hzの間にある周波数の交流電圧を印加し、前記車両を停止させるトルクを前記誘導モータに発生させて前記車両を停止状態で維持する。
(もっと読む)
速度検出装置、速度検出方法及び列車速度検出システム
【課題】車上側での高精度の速度検出を維持しつつ、地上側の装置の簡素化を図ること。
【解決手段】走行路3には、列車5の進行方向に沿ってスリット部分である開口部12と遮蔽部11とが同一間隔Lで交互に現れるように形成されているパターンプレート10が配置されている。列車5には、前方/後方それぞれに、進行方向に沿って設置間隔D=「2L/3」をおいて配置された3個の検出器40を有する検出部30が設けられている。検出器40は、パターンプレート10の遮蔽部11及び開口部12のそれぞれの検出に応じた検出信号(パルス信号)を出力する。そして、車上装置50では、各検出部30について、各検出器40からの検出信号の変化からパルス幅が「L/3」となるパルス信号を生成し、列車5の速度Vを算出する。
(もっと読む)
電動機制御装置及び再粘着制御方法
【課題】速度センサを用いずに、電動機が空転・滑走した場合の再粘着制御を適切に行う。
【解決手段】電動機制御装置1は、各誘導電動機の入力端に備えられた電流センサによって検出された電流に基づいて、各誘導電動機に発生した空転あるいは滑走を検出する。そして、各誘導電動機に流入する負荷トルク電流Iqに基づいて、空転・滑走発生前のトルクが推定され、再粘着後、再度の空転・滑走を発生させることなく、誘導電動機10の負荷トルクを推定トルクにまで速やかに上昇あるいは下降させる。したがって、一旦空転・滑走が発生した後、再度、空転・滑走発生前の状態に復帰する時間が短縮され、スムーズに復帰させることができる。
(もっと読む)
車両用駆動制御装置
【課題】前輪のスリップを適切に判定し、適切に四輪駆動走行を行うことである。
【解決手段】車両用駆動制御装置は、車両重量及び車両に外部から作用する力のうちの少なくとも一方を検出するロールバック判定部51及び走行抵抗値設定部52と、検出した車両重量及び車両に外部から作用する力のうちの少なくとも一方を基に、車両速度推定手段が推定する車両速度を補正する推定車速補正部53とを備える。
(もっと読む)
モータ制御装置,電力変換装置及びハイブリッド車両
【課題】
本発明の課題は、ブラシレスモータの起動時や低負荷時の駆動であっても、センサレス制御による安定したモータ駆動を実現することである。
【解決手段】
モータの各相の誘起電圧をアナログ信号により検出し、さらに該検出結果をデジタル信号に変換する電圧検出回路部と、前記電圧検出回路部により検出された非通電相の誘起電圧情報に基づき、前記スイッチング素子のスイッチング周期のオン時間である通電率を調整することにより前記モータの可変速制御を実行するPWM制御回路部と、前記PWM制御回路部で調整される通電率と予め定めた通電率との差に基づいて、該PWM制御回路部の通電率を変更する通電率変更部と、を備え、前記PWM制御回路部は、前記通電率変更部により変更された通電率における前記スイッチング素子のオン期間に、前記電圧検出回路部からの検出結果を読み込むモータ制御装置を提供する。
(もっと読む)
4輪駆動車両の制御システムおよび制御方法
各車軸に少なくとも1つのパワートレインを備える4輪駆動ハイブリッド車両において、第1のパワートレイン(1)が少なくとも1つの熱機関を含み、第2のパワートレイン(2)が少なくとも1つの電気機械を含む。制御システムは、摩擦ブレーキシステムと、1つのパワートレインの少なくとも1つの電気機械であって抵抗トルクを与えることができる電気機械との間でブレーキ要求を振り分ける配分手段(9)、センサからの信号に応じてブレーキシステムとパワートレインを出力先とするトルク設定値変調手段(10)、ならびにパワートレインの制御手段(8)を含み、該配分手段(9)、該トルク設定値変調手段(10)およびパワートレインの該制御手段(8)が動的に相互に作用することができ、それによって車両の安定に有利となるようにパワートレインおよび摩擦ブレーキシステムに対してトルク命令を送出する。 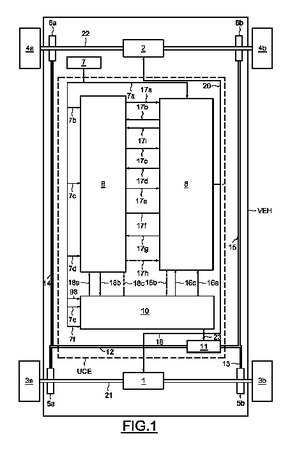 (もっと読む)
(もっと読む)
電気自動車の制御装置
【課題】車輪毎に車輪回転用モータを備えた電気自動車の利点を十分に発揮できる電気自動車の制御装置を提供する。
【解決手段】センサユニット100の3軸加速度センサによって検出したタイヤ(車輪)2a〜2dのX,Y,Z軸方向の加速度情報と、回転角度センサ530により検出したハンドル8の回転角度と、ヨーレートセンサ540により検出したヨーレート情報と、センサ510により検出したアクセルペダル6の踏み込み角度と、センサ520により検出したブレーキペダル7の踏み込み角度とに基づいて、駆動制御部700は各タイヤ2a〜2dを回転する車輪回転用モータ3a〜3dの駆動制御を行う。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】最外輪を除く駆動輪を駆動するモータにおいて、過剰なトルクが発生するのを抑制することができる、走行車両の走行制御装置及び走行制御方法を提供する。
【解決手段】本発明に係る走行制御装置は、複数の駆動輪がそれぞれ独立に駆動される走行車両に備えられるものであって、走行車両の旋回時に、最外輪の速度(VFL)に基づいて設定された最外輪許容トルク(TFLH)を超えない範囲で行われる速度制御によって最外輪トルク指令値(SFL)が決定され、この最外輪トルク指令値(SFL)が他の駆動輪の許容トルク(=SFL)としてそれぞれ設定され、この許容トルク(=SFL)を超えない範囲で行われる速度制御によって他の駆動輪のトルク指令値がそれぞれ決定されることを特徴とする。
(もっと読む)
回転速度推定装置及び振動抑制装置
【課題】車輪の回転速度を推定する際の精度を向上させること。
【解決手段】回転速度推定装置31は、車両1が備える車輪2の回転速度を推定するものである。回転速度推定装置31は、車両1の駆動系をモデル化した駆動系モデルに基づき、車輪2の回転速度を推定する。そして、車輪2のスリップに応じて、車輪2の回転速度を推定する際に用いる車両1のイナーシャを補正する。この場合、車両1のイナーシャは車輪2がグリップしている条件で推定した車輪2の回転加速度と、車輪2がスリップしている状態において得られる車輪2の回転加速度との比で補正される。
(もっと読む)
電動機の制御装置
【課題】電動機の出力トルクの変動を抑制すべき運転状態においてのみ、出力トルクの変動を抑制し、他の運転状態では、電動機の出力トルクやエネルギー効率を十分に高め得るように該電動機の運転を行なう。
【解決手段】アキシャルギャップ型の電動機3の所定の運転状態において、一方のステータ12aの電機子巻線13aの通電電流と他方のステータ12bの電機子巻線13bの通電電流との間の位相差を電動機3の出力トルクの変動を抑制するように設定し、その設定した位相差を有する通電電流を各ステータ12a,12bの電機子巻線13a,13bに流すように該通電電流を制御する。所定の運転状態以外では、各ステータ12a,12bの電機子巻線13a,13bの通電電流を同一位相とする。
(もっと読む)
車両駆動装置
【課題】高精度に回転速度を得られ、電動機の制御性の向上した4輪駆動装置を提供することにある。
【解決手段】4輪駆動車両において、前輪14R,14Lはエンジン1により駆動し、後輪15R,15Lは電動機5により駆動される。高出力発電機2は、エンジン1によって駆動され、その発電電力により電動機5を駆動する。4WDCU100は、高出力発電機2の発電及び電動機5の駆動を制御するとともに、電動機5の電圧MHVと、高出力発電機2の出力電流Iaとから、電動機の誘起電圧Eを推定し、推定された誘起電圧Eの推定値から電動機の回転速度Nmを推定する。
(もっと読む)
列車速度位置検出装置
【課題】モータの駆動制御で使用している速度情報を用いることにより、速度発電機付きの固有のモータを搭載しなくてもモータの回転数を得られる列車速度位置検出装置を提供することである。
【解決手段】列車の各々のモータごとに設けられモータの回転数を検出する回転数検出手段11と、回転数検出手段11ごとに設けられ回転数検出手段11で検出された検出信号に基づいてモータの正負回転数に相当する信号及び故障情報を算出するモータ駆動制御装置14と、モータ駆動制御装置14の出力信号に基づいて列車の速度や位置を算出する速度・位置算出手段12とを備える。
(もっと読む)
回転数の予測装置、予測方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体
【課題】第1MGの回転数を精度よく予測する。
【解決手段】HV_ECUは、MG_ECUから送信された信号に基づいて、第1MGの回転数を検出するステップ(S100)と、MG_ECUから送信された信号に基づいて、第2MGの回転数を検出するステップと(S110)、エンジンECUから送信された信号に基づいて、エンジン回転数の目標値を検出するステップ(S120)と、検出された第1MGの回転数に、(1+ρ)/ρとエンジン回転数の目標値の微分値との積を加えた値から、1/ρと第2MGの回転数の微分値との積を減じて、第1MGの回転数を予測するステップ(S130)とを含む、プログラムを実行する。
(もっと読む)
列車速度検出装置
【課題】より精度良く列車のATC、ATS、ATO用の列車速度を検出できる列車速度検出装置を提供することである。
【解決手段】列車の編成内の主電動機18を駆動制御する複数台のVVVFインバータ14を制御するとともに列車の速度を演算する速度演算手段19を備えた複数台のVVVFインバータ制御装置16と、各々のVVVFインバータ制御装置16の速度演算手段19が演算した速度の平均値を求めATC、ATS、ATOに出力する速度演算器13とを備える。これにより、より精度良く列車のATC、ATS、ATO用の列車速度を検出する。
(もっと読む)
車両から信号機までの距離測定方法
【課題】焦点距離、高さ、仰角のCCDカメラで撮影し、車両から信号機までの距離を測定する距離測定方法において、焦点距離、高さ、仰角のいずれかが未知数である場合であっても前記距離の測定ができるようにすること。
【解決手段】線路2と信号機を含む場面を、線路2上を走行する車両に搭載された焦点距離f、高さh、仰角θのCCDカメラで撮影し、ワールド座標系で表される線路2と信号機を含む場面とイメージ座標系で表される前記場面の画像との間に座標系の変換手法により成立する関係式と、線路2の幅Wは一定という関係式とをコンピュータで演算処理し、前記車両から信号機までの距離Z’を測定するようにした。
(もっと読む)
操舵制御装置、操舵制御システムおよび操舵制御プログラム
【課題】転舵専用アクチュエータ不要とすることによって操舵輪関連の設計上の自由度を向上させた、SBW技術使用の操舵制御装置を提供する。
【解決手段】操舵制御装置は、ステアバイワイヤ式の車両CRの操舵を制御する装置であり、左右の操舵輪TL,TRに独立してトルクを付与する操舵輪用モータML,MRと、左右の操舵輪TL,TRを転舵可能に連結するロッド部16と、操舵輪用モータML,MRを駆動制御する操舵制御部20Aと、を備え、操舵輪TL,TRの接地中心とキングピン位置とが車両CRの幅方向にオフセットしており、操舵制御部20Aは、左右の操舵輪TL,TRにトルク差を生じさせるように操舵輪用モータML,MRを駆動制御し、トルク差に応じた転舵力をロッド部16を介して左右の操舵輪TL,TRに伝達させることによって、車両CRを転舵させる。
(もっと読む)
定速走行制御方法及び制御装置
【課題】列車の定速走行時における高効率な運転制御を実現すること。
【解決手段】定速走行時、各車両1に備えられた制御装置30は、現在の走行速度Viと目標速度V*との速度差ΔV及び加速度αに基づいて稼動する主変換装置20の稼動台数Niを決定し、決定した稼働台数Niを基に自主変換装置20が稼動対象であるか否かを判断する。自主変換装置20が稼動対象ならば自主変換装置20を稼動し、稼動対象でないならば停止させる。またこのとき、主変換装置20は、主電動機10及び主変換装置20の総合効率が最も高い状態となるよう、自主変換装置20を稼動させる。
(もっと読む)
1 - 20 / 29
[ Back to top ]