
Fターム[5H115TO01]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 移動方向(正逆転)検出 (129)
Fターム[5H115TO01]に分類される特許
1 - 20 / 129
倒立振子型移動体
【課題】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら走行制御が行われる倒立振子型移動体において、搭乗者の意思に基づく操縦モードと、搭乗者の意思に基づかない自動運転モードとを実現することができる倒立振子型移動体を提供する。
【解決手段】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら車体の走行制御が行われる倒立振子型移動体において、制御装置から出力される操作信号に従って搭乗者の重心位置を調節するための重心位置調節手段を備え、制御装置は、搭乗者の意思に基づかないで所定の走行制御を行う自動運転モードへの切り換え指令が生成されたときに、目標となる走行状態が実現される重心位置となるように重心位置調節手段を制御し、重心位置に基づく走行指令に従って車輪駆動手段の制御を行う。
(もっと読む)
充電スタンド

【課題】電気自動車等の移動体の衝突に伴う不具合の発生を抑制する。
【解決手段】本実施形態の充電スタンドでは、検出手段である移動体センサ2によってスタンド本体1に接近する移動体が検出され、移動体センサ2の検出結果に基づいて移動体がスタンド本体1に衝突する可能性が制御部4で判定される。そして、衝突の可能性有りと判定した場合、制御手段たる制御部4が衝撃緩和手段(電動シリンダ部3)を制御して衝撃を緩和する。故に、衝突によりスタンド本体1が倒壊しても充電部が露出する虞は少なくなる。また、充電スタンドに衝突した移動体、例えば、自動車の車体や乗員が損傷や怪我などの被害を被る虞も少なくなる。よって、衝撃緩和手段を有しない従来例に比較して、本実施形態の充電スタンドでは、電気自動車等の移動体の衝突に伴う不具合の発生を抑制することができる。
(もっと読む)
充電プラン生成装置及び充電プラン生成方法
【課題】走行ルートに必要な電力量を過不足なく充電して、バッテリの長寿命化を考慮した充電プラン生成装置及び充電プラン生成方法を提供することを目的とする。
【解決手段】バッテリ(230)に充電された電力に基づいて走行する車両(200)の車両データを受信してメモリ(110)に蓄積するステップと、蓄積された車両データに基づいて走行ルートを決定するステップと、走行ルートを走行する場合の予想使用電力量(S)を走行ルートにおける走行電力量及び回生電力量を考慮して演算するステップと、バッテリに予想使用電力量が充電されるような充電プランを生成するステップを有することを特徴とする充電プラン生成方法、及び充電プラン生成装置(100)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】登坂シーンで車両がずり下がる際、バッテリの過充電を防止しつつ、回生による車両のずり下がりを抑制すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン3と、発電機5,6と、バッテリ8と、駆動機10,11と、ダイレクト配電制御手段(図2)と、車両ずり下がり対応制御手段(図7)と、を備える。ダイレクト配電制御手段(図2)は、発電機5,6が発電した実発電電力を過不足なく駆動機10,11の駆動電力として消費するように、駆動要求に応じて発電電力を制御する。車両ずり下がり対応制御手段(図7)は、ダイレクト配電による発電制御中、駆動トルク指令値の符号が反転せずに駆動回転数の符号が反転したとき、駆動機10,11を回生させる制御を行うとともに、発電機5,6を力行させる制御を行う。
(もっと読む)
電動車両のクリープカット制御装置
【課題】クリープトルク出力状態で車速に係わるクリープカット許可が成立している間に制動力を増大させた時、クリープカットの実行で違和感のあるトルク低下が発生することのないクリープカット制御を提案する。
【解決手段】前進クリープトルク出力状態で車速VSPがV1未満のクリープカット禁止車速域に入り(t1)、この状態がタイマ値NTM1に対応した設定時間だけ継続するとき(t2)、クリープカット禁止フラグNFLAG=1によりクリープカットを禁止する。このため、車速VSPが0近辺であって車速に係わるクリープカット許可条件が成立している間に、制動力がクリープカット許可制動力以上となって制動力に係わるクリープカット許可条件が成立し(t3)、これを受けて、t4にクリープカット許可フラグFLAGが1にセットされても、これに呼応したクリープカットが行われることがなく、t4以降もクリープトルクを出力し続け、t4にクリープカットの実行により違和感のあるトルク低下が発生するのを防止することができる。
(もっと読む)
電動車両のクリープカット制御装置
【課題】クリープトルク出力状態での逆方向移動を防止する制動時に、クリープカットの実行で違和感のあるトルク低下が発生するのを防止する。
【解決手段】前進クリープトルク出力状態で車両が、車速VSPの経時変化により示す後退方向へずり下がりを生じ、これを防止するための制動がt3に行われた場合において、後退方向へずり下がりを車速VSP<-V1により検知しt1、この状態がタイマ値NTM1に対応した設定時間だけ継続するときt2、クリープカット禁止フラグNFLAG=1によりクリープカットを禁止する。このため、上記の後退方向車両移動を防止するためのt3における制動開始により、t5に車速VSPが0近辺の値になったのを受けて、従来のクリープカット許可フラグFLAGが1にセットされても、これに呼応したクリープカットが行われることがなく、t5以降もクリープトルクを出力し続ける。
(もっと読む)
電磁ブレーキの制御装置および同装置を搭載した荷役車両
【課題】車両停止時、電磁ブレーキの作動回数が減ることにより、電磁ブレーキの作動音による運転者の不快感を低減できると共に、車両発進時、スムーズな発進感覚を提供できる電磁ブレーキの制御装置の提供。
【解決手段】荷役車両に搭載され、ブレーキペダルを踏み込むと制動状態より解放される電磁ブレーキの制御装置であって、その制動条件を、車両速度が発生している時における第1の制動条件と、発生していない時における第2の制動条件とからなるものとし、第1の制動条件を、ブレーキペダルが踏み込まれている否かのほか、車両速度が規定値を超えるものか否かにより電磁ブレーキを制動状態とするか解放するか制御するものとし、さらに、第2の制動条件を、ブレーキペダルが踏み込まれている否かのほか、車両動作量が規定値を超えるものか否かにより電磁ブレーキを制動状態とするか解放するか制御するものとする。
(もっと読む)
電動車椅子
【課題】側溝近傍や駅のプラットホーム走行時に、側溝や線路上への転落を警告することによって、安全な操作を容易行える電動車椅子を提供する。
【解決手段】自車に取り付けた距離センサによって、自車と走行路面までの距離を計測し、その計測結果を基に、自車近傍の段差を検知して、乗員へ警告あるいは走行禁止の判断を行うことによって、凹段差への転落の危険性を軽減できるため、駅のプラットホーム上などにおいても電動車椅子を安全に操作さすることが容易となる。
(もっと読む)
電動自動車の警報音発生装置
【課題】自動車の進行方向にいる歩行者に警報音を確実に伝播させて気付かせ、歩行者の安全性を高める電動自動車の警報音発生装置を提供する。
【解決手段】電気自動車またはハイブリッド自動車からなる電動自動車1に搭載される警報音発生装置であって、車両速度検出用のセンサと、該センサから検出信号を受信する電子制御ユニットと、該電子制御ユニットから駆動信号を受信すると共に自動車の前後左右に分散設置された複数のスピーカー10A、10Cを備え、前記各スピーカー10A,10Cは車両の車体外面に搭載されている既存の既車載品あるいは車体外面の近接位置に搭載されている既車載品に付設した車載品一体型とし、該既車載品の車体への取り付けで前記スピーカー10A,10Cが車体に取り付けられる。
(もっと読む)
車両制御装置及びハイブリッド車両
【課題】環境を考慮して走行モードやエンジン出力を制御する車両制御装置及びハイブリッド車両を得る。
【解決手段】現在位置を検出する位置検出部21と、地図データを記憶する地図データベース22と、地図データ内の特定区間の閾値のリストを記憶する記憶部25と、特定区間規模判定部24と、車両制御部28とを備える。特定区間規模判定部24は、位置検出部21からの現在位置が地図データベース22からの地図データにおける特定区間の場合、この特定区間の規模を判定する。車両制御部28は、特定区間規模判定部24からの情報と記憶部25からの閾値のリストを基に車両の走行モードとエンジン出力を制御する駆動制御部17に車両を電動機走行モード及びエンジン出力低下の少なくともいずれかとする制御信号を出力するものである。
(もっと読む)
ナビゲーション装置
【課題】バッテリを電源とした走行用モータを備えた車両に搭載されるものにあって、駐車場の検索を行う際に、バッテリの充電に関する適切な情報をユーザに提供する。
【解決手段】ナビECU7は、ユーザにより駐車場の検索が指示された際に、地図データベース9から現在地周辺の駐車場を検索する。このとき、バッテリ監視装置3から得られるバッテリ1の現在の残存容量、車載通信機5により情報サービスセンタ4から取得された充電関連情報、入力された予定駐車時間や目標充電量から、検索された各駐車場に関する、充電コストを求めて表示装置12の画面にリストとして表示する。充電コストは、予定駐車時間における、太陽電池2による充電量、外部充電設備を利用した場合の充電量及び支払うべき料金、予想充電率、駐車料金を含んだ全体の料金等を含む。
(もっと読む)
報知音制御装置および報知音制御方法
【課題】報知音の発生が必要とされる場合に報知音の出力を適切に制御する技術を提供する。
【解決手段】演算部20は、車両の位置に関する情報と、車両の進行方向に関する情報とを取得するとともに、道路の位置に関する情報と、道路の延伸方向に関する情報とを取得する。擬似走行音制御部40は、取得した車両の位置に関する情報と、取得した道路の位置に関する情報とをもとに、車両が道路上に存在することを推定した場合、取得した車両の進行方向に関する情報と、取得した道路の延伸方向に関する情報との差分をもとに、車両の擬似走行音の出力を制御する。
(もっと読む)
報知音制御装置および報知音制御方法
【課題】報知音の発生が必要とされる場合に報知音の出力を適切に制御する技術を提供する。
【解決手段】演算部20は、車両の位置に関する情報、道路の位置に関する情報、車両の走行状態に関する情報を取得する。擬似走行音制御部40は、取得した車両の位置に関する情報と、取得した道路の位置に関する情報とをもとに、車両が道路外に存在することを推定した場合、取得した車両の走行状態に関する情報が発進を示しているかに応じて、車両の擬似走行音の出力を制御する。
(もっと読む)
車両用左右駆動力調整装置の制御装置
【課題】二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】姿勢制御を行うためのトルク差を演算し(ステップS1、S2)、二次電池の充電率の増減に応じて、電動AYCモータとブレーキ装置へのトルク差の配分率を変動させて(ステップS3〜S6)、配分されたトルク差により電動AYCモータ及びブレーキ装置を各々制御して、姿勢制御を行う(ステップS6〜14)。
(もっと読む)
移動装置
【課題】発熱を伴って動作する複数の並進機構の熱劣化寿命の延長を図ることができる移動装置を提供する。
【解決手段】複数の並進機構(電動モータ31R,31L)のうち一の並進機構の温度余裕が他の並進機構の温度余裕よりも大きい場合、当該一の並進機構の発熱量が当該他の並進機構の発熱量よりも多くなるように当該複数の並進機構の動作態様が制御される。これにより、複数の並進機構の間での温度余裕の差が低減される。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車の位置を正確に検出して列車の速度を制御する。
【解決手段】GPS受信機3a,3bから出力される位置情報により算出したGPSアンテナ2a,2b間の距離と方位と列車1の走行経路が制御情報記憶部5に記憶しているGPSアンテナ2a,2b間の距離Lと方位Dp及び走行経路と近似しているかどうかを判定するとともにGPS受信機3a,3bから出力される速度情報が列車1の実走行速度Vと近似しているかどうかを判定し、全てが近似しているとき、GPS受信機3a,3bの精度良好として列車1の前部に設けられたGPSアンテナ2aが接続されたGPS受信機3aから出力する位置情報により列車1の走行位置を決定して列車1の走行位置を検出するための地上子等を地上に設置する必要がなく、地上設備を簡略化して設備費を低減する。
(もっと読む)
踏切保安装置
【課題】地上設備を簡略化して設置費用を低減して踏切制御の適正化を図る。
【解決手段】列車2に搭載された車上装置3は、常時、GPS受信機8でGPS衛星15から送信されて電波を利用して列車2の位置(緯度・経度)と時刻を得て各踏切6に対する踏切到着予定時間をセンタ装置4に送信する。センタ装置4は車上装置3から踏切到着予定時間を受信するときGPS受信機22から入力する時刻により時間同期し、受信した踏切到着予定時間を各踏切6に設けられた踏切制御装置5に送信する。踏切制御装置5はセンタ装置4から踏切到着予定時間を受信するときGPS受信機32から入力する時刻により時間同期し、受信した踏切到着予定時間とGPS受信機32から入力する時刻により警報開始時間や警報終了時間を決定して踏切制御を行う。
(もっと読む)
移動ロボット及びその走行安定化方法
【課題】移動体が段差を乗越えた際に発生する横方向振動を抑制する。
【解決手段】本発明による走行安定化装置はセンサ情報または地図情報を利用し、移動体と凹部凸部を含む段差との接触時点を予測し、アクチュエータを制御することで移動体の重心を左右方向に動かし、段差を乗越えたことを検出した際は次の段差に対応するように移動体の重心を左右に動かすことを特徴とする。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
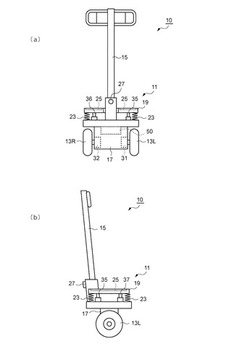
倒立振子型車両
【課題】車両の用途や使用方法に応じて、適切に車両を制御する。
【解決手段】倒立振子型車両1は、折り畳み可能に組付けられたシート15R,15L及びステップ25R,25Lを備える。シート15R,15L及びステップ25R,25Lの折り畳み状態に基づき決定された動作モードを応じて値が変化する特性パラメータKi_x,Ki_y(i=1,2,3)及びθb_x_obj,θb_y_objを用いて車輪体5の制御用操作量が決定される。
(もっと読む)
1 - 20 / 129
[ Back to top ]