
Fターム[5H180LL08]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音以外の警報であるもの (2,573)
Fターム[5H180LL08]に分類される特許
201 - 220 / 2,573
情報提供装置、情報提供システム及び情報提供方法
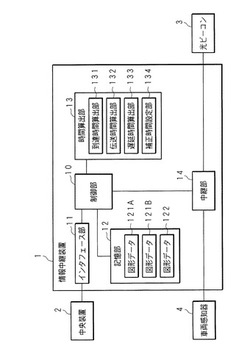
【課題】対象車両に対して正しいタイミングで所定情報を提供することができる情報提供装置、情報提供システム及び情報提供方法を提供する。
【解決手段】到達時間算出部131は、車両が車両感知器4で感知された感知時点から光ビーコン3と通信可能になる位置に到達するまでの到達時間T1を算出する。伝送時間算出部132は、情報中継装置1から送信された所定情報が光ビーコン3で受信されるまでの伝送時間T2を算出する。遅延時間算出部133は到達時間T1から伝送時間T2を減算して所定情報の送信遅延時間を算出する。送信遅延時間は、所定情報(注意図形データ)の第1送信時点である登録遅延時間TXを決定する。制御部10は、登録遅延時間TX経過の時点で注意図形データを光ビーコン3へ送信する。
(もっと読む)
運転支援装置

【課題】本発明は、支援情報の有効期間に応じた適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】路側装置から受信した支援対象地点までの支援情報に基づいて支援対象地点における自車の運転を支援する運転支援装置1であって、路側装置から支援情報の有効期間を取得する有効期間情報取得手段10,21と、取得した支援情報の有効期間に応じて運転支援を行う運転支援手段24,25,26,27とを備えることを特徴とし、さらに、自車の支援エリアからの逸脱を判定する逸脱判定手段23を備え、運転支援手段24,25,26,27は、逸脱判定手段23での判定結果と支援情報の有効期間内か否かに応じて運転支援内容を変更すると好適である。
(もっと読む)
運転支援装置
【課題】 事象に関する情報をドライバに対して確実に伝達することができる運転支援装置を提供する。
【解決手段】 高負荷位置検出部11は、地図情報等に基づいて高負荷位置を検出する。高負荷位置通過タイミング算出部12は、高負荷位置情報や自車両の車速、加速度等に基づいて、自車両が高負荷位置を通過する時刻を算出する。事象情報取得部13は、インフラ協調情報等に基づいて事象を取得する。仮情報通知位置算出部14は、インフラ協調情報等および車両の走行情報に基づいて仮情報通知位置を算出する。情報通知位置変更部15は、通過時刻情報および仮情報通知位置に基づいて、仮情報通知位置を変更するか否かを判断し、この判断結果に基づいて、最終的な情報通知位置を決定する。
(もっと読む)
生体状態推定装置
【課題】運転者の覚醒度が低下し始める初期状態を推定することができる生体状態推定装置を提供する。
【解決手段】運転者の生体状態を推定する生体状態推定装置1であって、運転者の操舵を取得し、走行車線に対する車両の走行位置を取得する入力部10と、走行車線内において運転者が走行車線からの逸脱を意識する範囲である通常走行域R及び走行位置に基づいて通常走行域Rからの逸脱を判定し、通常走行域Rの逸脱に対する操舵変化に基づいて、運転者の覚醒度の低下を判定する覚醒度低下判定部11と、を備えることで、運転者の覚醒度が低下し始める初期状態を推定することができる。
(もっと読む)
覚醒度調整装置及び方法
【課題】対象者が覚醒度調整の意思のある場合にのみ、覚醒度調整を行うことができる覚醒度調整装置を提供する。
【解決手段】ストレス度判断部11は、撮像カメラ1が撮像した画像から運転者の表情、行動を認識してストレス度を判断する。覚醒度判断部12は、ステアリングホイール7の操舵信号を高速フーリエ変換して操舵振幅と操舵周波数を取得する。そして、操舵振幅と操舵周波数に基づいて、低い覚醒度、或いは高い覚醒度を判断する。高い覚醒度且つストレス度大の場合、温度制御部13及びペルチェ素子4により末梢温度を上昇させて正常覚醒へ誘導する。低い覚醒度且つストレス度大の場合、温度制御部13及びペルチェ素子4により末梢温度を低下させて正常覚醒へ誘導する。
(もっと読む)
情報提供装置、情報提供システム及び情報提供方法
【課題】対象車両に対して正しいタイミングで所定情報を提供することができる情報提供装置、情報提供システム及び情報提供方法を提供する。
【解決手段】制御部10は、時刻t1に車両感知器4を通過した車両が速度超過である場合において、当該車両の速度情報を取得した後、所定時間である解除遅延時間TYが経過する前に、時刻t2(時刻t1の後)に車両感知器4を通過した速度超過の車両の速度情報を取得したときには、先の速度情報を取得した時点ではなく、後の速度情報を取得した時点から所定時間である解除遅延時間TYだけ遅延させた時点で第2の所定情報としての通常図形データを光ビーコン3へ送信する。
(もっと読む)
情報提示装置
【課題】ステアリングホイール3やシート20の振動源以外の部分に接触していても、運転者に方向性のある情報を的確に情報伝達する。
【解決手段】安全性快適性増進装置7からの信号により方向性のある情報を取得する方向情報取得手段8と、該方向情報取得手段8からの方向性のある情報に基づいて駆動信号を発生する情報提示制御手段9と、該情報提示制御手段により駆動されて振動の進行波をステアリングホイール3またはシート20に発生する複数の振動素子2a、2b等を備えた刺激手段2を備え、方向性のある情報に応じた方向の進行波を知覚させる。これにより、進行波の方向により、注意を喚起したり、適切な運転操作を促したり、機器の動作状況を的確に伝えることが出来る。
(もっと読む)
情報提供システム及び情報提供装置
【課題】交通状況等に応じて異なる情報を速やかに提供することができる情報提供システム及び情報提供装置を提供する。
【解決手段】制御部10は、車両感知器4から送信された車両情報に基づいて、通常図形データ(図形データ121A)又は注意図形データ(図形データ121B)のいずれか一方を選択し、選択した図形データを光ビーコン3へ送信する。例えば、車両の速度が速度閾値(例えば、80km/h)より小さい場合には、通常図形データを選択することにより、車両の表示部に道路の背景図上に「走行注意」の文字又は図形を表示させる。また、車両の速度が速度閾値より大きい場合には、注意図形データを選択することにより、車両の表示部に道路の背景図上に「速度注意」の文字又は図形などを表示させる。
(もっと読む)
脇見検出装置
【課題】運転者の顔の凹凸に起因する影を大きくすることなく、顔画像に基づく判断をより正確にできる脇見検出装置を提供する。
【解決手段】本発明は、使用者の顔面を含む画像を撮像する撮像手段と、撮像手段の近傍に当該撮像手段の設置方向と光軸が略並行となるように設置された光源と、光源から照射された光の反射箇所を画像に基づいて検出する検出手段と、使用者の顔の位置を検出する顔位置検出手段と、顔の位置と、反射箇所とに基づき使用者の脇見を判断する判断手段とを備える。
(もっと読む)
車両用画像表示装置
【課題】自車両の前方や後方等を撮影して運転者の運転を補助し、撮影した画像に含まれる個人情報を保護することができる車両用画像表示装置を提供する。
【解決手段】車両の前方及び後方の映像を夫々撮影する複数のカメラを含み前記車両の周囲を撮影可能な撮像部と、複数のカメラで撮影したカメラ画像のうち、自車両の前方又は後方に近接する第1の車両の画像に含まれる個人情報保護領域を目隠しするマスク画像を生成するマスク画像生成部と、カメラ画像を利用して第1の車両の前方又は後方での第2の車両の有無を監視する周辺監視部と、周辺監視部によって第2の車両の存在を判別したとき、第2の車両の存在を示す識別画像を生成する識別画像生成部と、カメラ画像にマスク画像及び識別画像を合成して表示部に表示する合成処理部と、を具備する。
を具備する。
(もっと読む)
情報提供システム及び情報処理装置
【課題】異常レベルに応じて情報提供サービスの稼動の可否を選択することができる情報提供システム及び情報処理装置を提供する。
【解決手段】判定部11は、処理部10の状態が、予め定められた複数の異なる異常レベルのいずれであるかを判定する。決定部12は、判定部11で判定した異常レベルを正常とするか異常とするかを決定する。判定部11は、決定部12で決定した結果に基づいて、情報中継装置1が正常であるか異常であるかを示すフラグを中央装置8へ送信する。中央装置8は、情報中継装置1から送信されたフラグに応じて、情報提供サービスの稼動の可否を判定する。中央装置8は、例えば、異常を示すフラグを受信した場合には、情報提供サービスの稼動を停止する。
(もっと読む)
車両操縦用画像表示装置および方法
【課題】夜間または濃霧などの視界の悪い状況下で、車両前方の路面領域を画像表示することができ、これにより舗装路、未舗装路を区別することなく移動体を操縦することができる車両操縦用画像表示装置および方法を提供する。
【解決手段】車両1に搭載された赤外線カメラ10により車両前方の特定範囲の赤外線画像2を撮影し、車両に搭載された3次元形状測定装置20により前記特定範囲の3次元形状3を計測し、演算処理装置30により3次元形状から車両が通りやすい路面領域4を検出し、赤外線画像2上において路面領域を強調した補正赤外線画像5を形成し、表示装置40により補正赤外線画像5を表示する。
(もっと読む)
車両周辺認知支援装置
【課題】
ホーンを普段ほとんど使用しない車両100の運転者がいざというときに即座に危険回避行動(ホーンを鳴らす)が取れる車両周辺認知支援装置を提供すること。
【解決手段】
車両100の周辺に存在する物体の物体情報をフロントカメラ11が検出すると、電子制御ユニット1は当該物体情報に基づいて、ステアリングホイール21に備えられたホーンパッド61に設置された発光部71を発光させるため、車両100の運転者はホーンパッド61の位置を容易に認識することができる。
(もっと読む)
車両周辺認知支援装置
【課題】運転者が煩わしさを感じることなく自然に意識を向けるきっかけを与えることのできる車両周辺認知支援装置を提供する。
【解決手段】車両の周辺を撮影する車載カメラにより時系列に撮影された複数のフレームからなる撮影画像を受け取る画像受取部11と、異なる時刻に撮影された複数のフレームに含まれる特徴点に基づいてオプティカルフローを演算するオプティカルフロー演算部12と、オプティカルフローに基づいて車両の周辺の移動体を検出する移動体検出部13と、オプティカルフローに基づいて移動体の移動軌跡を示す表示を撮影画像に重畳させる重畳部15とを備える。
(もっと読む)
車両用距離算出装置
【課題】本発明は、撮像環境下の日照条件が変化した場合でも、正確に対象物までの距離を算出することができる車両用距離算出装置を提供する。
【解決手段】撮像手段101は、自車両の所定位置に、その撮像範囲内に自車両の一部が入るように設置され、自車両および自車両の周辺を撮像する。自車領域抽出手段102は、撮像手段101によって撮像された画像から自車両の領域を抽出する。画質推定手段103は、自車領域抽出手段102によって抽出された自車両領域の画像を解析して入力画像の画質を推定する。画質調整手段104は、画質推定手段103による推定結果に基づき入力画像の画質を調整する。対象物検出手段105は、画質調整手段104によって調整された映像を処理して対象物を検出する。距離算出手段106は、対象物検出手段105によって検出された対象物までの距離を算出する。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
分岐路進入判断装置及び分岐路進入判断方法
【課題】自車両が分岐路に進入したことを確実に検出することができる分岐路進入判断装置等を提供する。
【解決手段】自車両の前方方向に分岐路が存在することを検出した場合に、単眼カメラ3により撮像した撮像画像に基づいて、カメラコントローラ4により認識された右側白線認識結果と左側白線認識結果との組み合わせから、コントローラ10が、自車両が分岐路に進入したと判断する。自車両が分岐路に進入した場合に、ナビゲーション装置2の位置補正部2dにより位置を補正できる。
(もっと読む)
車両用運転支援装置
【課題】路側通信機の情報を乗員へ報知可能な車両用運転支援装置において、自車両と移動体の接近度と情報の劣化度とを乗員に対して報知でき、情報の劣化度に応じた接近度を報知可能な車両用運転支援装置を提供する。
【解決手段】運転支援装置は、路上の移動体を検出可能な路側ユニットから自車両前方の移動体に関する情報を受信し、この移動体の情報を乗員へ報知するように構成されている。存在領域算出部16は、移動体を検出した場合、移動体が交差点に到達するまでの期間推定するように構成され、移動体を撮像した時点からの経過時間に起因した情報の曖昧さを移動体の存在領域の算出に反映している。
(もっと読む)
運転支援システム、運転支援装置、運転支援方法、及び運転支援プログラム
【課題】ドライバの思い込みによるリスクを低減できる運転支援システムを提供する。
【解決手段】車両の運転を支援する運転支援システムにおいて、自車に搭載されている自車周辺の映像を撮像する映像撮像装置と、前記自車周辺にある障害物までの距離を測定する障害物距離計測装置と、前記撮像した自車周辺の映像と記憶している自車を模擬した画像とを合成するモニタ映像生成部と、前記計測された距離に基づいて、ドライバの危険運転度を判定する危険運転度判定部と、前記危険運転度判定部の判定結果に基づいて、自車を模擬した画像の大きさを変更する画像変更部とを備えた運転支援装置と、前記画像変更部で変更された画像を表示可能な画像表示装置とを備える。
(もっと読む)
物体検出装置
【課題】レーダ装置が検出した物体について、衝突判断の対象物とする必要があるか否かの判断を適切に行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、車両の周辺の物体を検出する検出手段と、検出手段が検出した物体について、当該物体の進行方向、当該進行方向から算出される物体の存在位置、および進行方向を示す直線と車両の中心軸とがなす角である進入角度を示す車両情報を算出する処理手段と、車両から車幅方向に沿った物体までの側方距離および進行方向を示す直線と車両の中心軸とがなす角の角度に基づいて予め設定された判定範囲を示す判定情報を記憶する記憶手段と、処理手段が算出した車両情報を用いて、存在位置および進入角度が判定範囲内であるか否かに基づいて物体を車両と衝突の危険性判断の判断対象である衝突判定対象物とするか否かを判定する判定手段とを備える。
(もっと読む)
201 - 220 / 2,573
[ Back to top ]