
Fターム[5H180LL08]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音以外の警報であるもの (2,573)
Fターム[5H180LL08]に分類される特許
141 - 160 / 2,573
表示装置
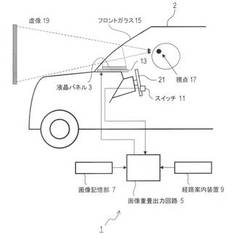
【課題】画像の表示に関して煩わしさを感じさせ難く、画像が見易い表示装置を提供することを目的とする。
【解決手段】画像を表示する光を、フロントガラス15にて反射させ、ドライバーの目17に出力し、車両2の前方に、前記画像を虚像19として表示する虚像表示手段3と、前記車両2から所定の目標地点までの距離Bを取得する距離取得手段9と、前記ドライバーから見て、前記画像が前記目標地点から所定の距離Aにある道路上に見えるように、前記虚像表示手段3における前記画像の表示位置を設定する表示位置設定手段5と、前記ドライバーの操作に応じ、前記虚像表示手段3によって前記表示位置に表示される画像を、(a)前記距離Aを表す画像X、及び(b)前記画像Xよりもぼやけている画像Yのうちのいずれかとする画像選択手段11と、を備えることを特徴とする表示装置1。
(もっと読む)
逆走警告装置

【課題】逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置において、逆走するおそれがあると誤判定することを防止する逆走警告装置を提供すること。
【解決手段】所定以下の車速で逆走のおそれを検出する逆走警告装置100であって、自律航法により自車位置を検出する自律航法手段33と、車線区分線に対する自車両の車長方向の角度を検出する角度検出手段22と、前記角度が略90度になり、かつ、前記自車位置から本線までの直線距離が閾値以下であることを条件に、逆走のおそれがあることを検出する逆走検出手段31と、を有することを特徴とする。
(もっと読む)
介助犬を伴う視覚障がい者用の移動体接近警告システム、同システムに用いられる移動体搭載用の超音波発生装置及び同システムに用いられる超音波受信装置
【課題】この発明は、介助犬を伴う視覚障がい者にとって非常に有効となる移動体接近警告システム、同システムに用いられる移動体搭載用の超音波発生装置及び同システムに用いられる超音波受信装置を提供することを目的としている。
【解決手段】移動体(11,19)に搭載されるもので、人間の可聴周波数帯域より高い犬の可聴周波数帯域に属する超音波を発生する超音波発生手段(12)と、視覚障がい者用の介助犬に装着されるハーネス(20)に取り付けられるもので、超音波発生手段(12)で発生された超音波を受信して振動に変換することにより、視覚障がい者に移動体(11,19)の接近を警告する超音波受信手段(21)とを備える。
(もっと読む)
道路形状検出装置、走行制御装置、及び道路形状検出方法
【課題】認識しているカーブ数のハンチングを抑制する。
【解決手段】各カーブ区間の入口補間点について、演算周期における前回の演算結果と比較し、カーブ区間数が変動しているか否かを判定し(ステップS5)、カーブ区間数が変動していたら、前回のカーブ情報と自車両の移動量とに基づいて、今回のカーブ情報を補正する(ステップS6)。先ず、カーブ区間が減少しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ増加させる。一方、カーブ区間が増加しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ減少させる。すなわち、今回のカーブ情報を、前回の配列に戻す補正を行うことで、前回のカーブ区間数を保持する(ステップS62)。
(もっと読む)
運転支援装置
【課題】より自車が走行する状況に応じて、自車が経路上を走行するための規範となる運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】ECU20が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車100が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100が経路上を走行するための規範となる規範速度を算出する。このため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車100が走行する状況に応じた規範速度を提供することが可能となる。
(もっと読む)
刺激効果予測装置、睡眠深度予測装置、刺激効果予測方法及び車両制御装置
【課題】睡眠時の刺激効果を予測する。また、睡眠深度の予測時期に影響されることなく睡眠深度を高精度に予測する。
【解決手段】
後席搭乗者に刺激を与える刺激発生装置3と、後席搭乗者の脳波を計測する脳波計測装置2と、メモリ4と、覚醒時に刺激発生装置3から刺激を与えたときに脳波計測装置2が計測した脳波と、睡眠時に刺激発生装置3から刺激を与えたときに脳波計測装置2が計測した脳波とから、刺激に対して覚醒時及び睡眠時に共通して現れる刺激効果の脳波指標を特定するECU5と、を備え、ECU5は、覚醒時と睡眠時とで同一の刺激を与えたときに現れる脳波指標に基づいて作成された覚醒時の刺激効果と睡眠時の刺激効果とを変換する変換モデルを用いて、覚醒時の刺激効果から睡眠時の刺激効果を予測し、刺激効果と睡眠深度の変化との関係に基づいて後席搭乗者に与える刺激を選択する。
(もっと読む)
運転アシストシステム
【課題】エコモード設定による加速不足で、交通の流れを悪くしてしまうなどの問題を解消する運転アシストシステムを提供する。
【解決手段】本発明は、エネルギーをセーブして走行するエコモードを備える車両に搭載される運転アシストシステムであって、周辺車両の走行状況を取得する周辺車両走行状況取得手段と、前記車両の外界と重畳させるように画像を表示する表示手段と、前記表示手段に表示する前記車両の予測到達位置を算出する位置算出手段(ステップS112)と、前記周辺車両走行状況取得手段によって取得された前記周辺車両の走行状況と、前記位置算出手段によって算出された前記車両の予測到達位置とから、前記車両が前記周辺車両と接触する可能性があるか否かを判定する判定手段(ステップS114)と、前記判定手段によって前記車両が前記周辺車両と接触する可能性があると判定されたときに警告を行う警告手段(ステップS115)と、を有することを特徴とする。
(もっと読む)
車両用制御装置
【課題】ミリ波レーダが開閉バーを物体として検出し、PCSが作動することによって運転者に違和感を与えてしまうこと等を抑制できる車両用制御装置を得る。
【解決手段】ETC車載器10と路側アンテナの通信が完了したときから、車速センサ50によって検出された自車両の速度が所定速度以上になったときまで、物体判定閾値を、開閉バーを無視するように、基準値から開閉バー判定値に変更し、自車両の前方物体からの反射波のピークレベルが物体判定閾値未満の場合、前方物体をノイズと見なし、一方、ピークレベルが物体判定閾値以上である場合、前方物体を目標物体として検出し、前方物体の距離及び相対速度を算出するミリ波レーダ20と、算出された前方物体の距離及び相対速度に基づき、衝突予想時間及び衝突軽減処理閾値を算出し、衝突予想時間が衝突軽減処理閾値未満である場合、衝突軽減処理を行う衝突軽減制御部30とを設けた。
(もっと読む)
車両システム、交通システム
【課題】車両の運転者に対して減速支援を行う際に、燃費向上効果を低減させることなく、走行時の安全性を確保する。
【解決手段】車両の走行速度が、車両が無停止で走行するための速度範囲内ではないと判断された場合には(S120:NO)、注意喚起を実行する必要があると判断し、減速支援を示す情報(車両が無停止で走行するための速度範囲)と注意喚起を示す情報(「後方注意」の文字)とをメータパネル本体21の表示領域21aに同時に表示させる(S125、S130)。このことにより、後方を走行する車両から急接近されないように運転者が注意して車両の減速を行うことができる。さらに、このような減速支援によってスムーズな減速が実行されることで、燃費向上効果が低減されない。したがって、車両の運転者に対して減速支援を行う際に、燃費向上効果を低減させることなく、走行時の安全性を確保することができる。
(もっと読む)
運転支援装置
【課題】自車周辺の障害物と自車との接触のリスクを考慮に入れ、自車が現実的な運転行動を行うことができる支援を行う運転支援装置を提供する。
【解決手段】運転支援装置10のECU20は、自車周辺の状況に対する自車100の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車100が走行した場合における自車100周辺の障害物と自車100との接触のリスクを予測する。このため、自車100周辺の障害物と自車100との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
(もっと読む)
車両用表示装置
【課題】表示項目を表示部に表示させない場合に光源の光が液晶表示器を透過するのを防止しつつ、利用者が余裕を持って表示領域を視認可能な車両用表示装置を提供する。
【解決手段】所定の表示項目を表示可能な液晶表示器24の表示領域に非表示モードが設定可能で、非表示モードが設定された表示領域を照明する点光源41を減光制御する投射型の車両用表示装置であって、所定時間後に表示項目の割り込み表示が発生することを予測する表示予測手段55を設け、該表示予測手段55の予測結果に基づいて減光制御がなされている点光源41の輝度を表示部に表示項目を表示させるときの輝度まで増加させる増加制御を行う。
(もっと読む)
運転評価装置
【課題】運転者個人に適した運転評価を行うこと。
【解決手段】運転評価装置1は、車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標状態記憶部13と、許容危険度に基づいて当該複数の目標情報から一の目標情報を選択する目標状態選択部14と、自車両の状態量を検出する車両状態検出部12と、検出された自車両の状態量に基づいて現在の危険度を推定する運転推定部15と、選択手段により選択された一の目標情報の危険度と推定された危険度とを比較して自車両の運転状況を判定する判定部16と、許容危険度と推定された危険度とに基づいて該許容危険度を修正する修正部18と、を備える。
(もっと読む)
交差点運転支援装置
【課題】非優先道を走行する車両が優先道に進入するに際し、見通しの良い交差点では交差点支援情報を報知しないことで、運転者に与える煩雑感を軽減させるようにする。
【解決手段】非優先道102から優先道101に進入するに際し、見通し判定処理部14は一時停止位置104付近に設置されている第1インフラ設備103aから得られた優先道101側の移動体情報と、車両に搭載されている自律センサで検出した優先道101側の移動体情報とを比較し、不一致の場合は見通しが悪いと判定し、一致した場合は見通しが良いと判定する。そして不一致の場合は運転者に交差点支援情報を運転者に報知し、一致した場合は、運転者が目視により確認済みであると判定し報知しない。
(もっと読む)
ドライバー状態推定装置及びドライバー状態推定方法
【課題】より精度良くドライバーの状態を推定することが可能なドライバー状態推定装置及びドライバー状態推定方法を提供する。
【解決手段】運転支援装置10の注意レベル推定部20は、ドライバーの注意レベルが低いレベルと高いレベルとの場合にTN、HV及びHRの3つのパラメータの標本値群を取得し、ベクトル空間上にプロットし、各標本値群中で平均値の点同士を結ぶ直線N1を法線とし、直線N1の中点M1を通る平面P1を設定する。注意レベル推定部20は、測定されたTN、HV及びHRが平面P1のいずれの側に位置するかでドライバーの注意レベルを推定する。ドライバーの注意レベルが異なる標本値群を3次元のベクトル空間上にプロットするため、標本値群中の標本値にバラツキがあっても、注意レベルの異なる標本値群同士を判別し易くなり、より精度良くドライバーの状態を推定できる。
(もっと読む)
車両用注意喚起装置
【課題】注意喚起の仕方を工夫することにより、自車両が交差点付近の対象障害物に衝突しないようにする車両用注意喚起装置の提供。
【解決手段】運転者に交差点付近で注意を喚起する車両用注意喚起装置であって、自車両の走行位置を検出する走行位置検出手段と、上記自車両が右折または左折のために交差点に近づいてから右折または左折後に当該交差点を離れるまでの間、運転者に交差点付近への注意を喚起するために運転者に視覚刺激を与える視覚刺激手段と、上記自車両の走行位置に応じて、上記視覚刺激手段の刺激強度を異ならせる刺激制御手段とを備える。
(もっと読む)
通知装置
【課題】無線装置の搭載の有無に関係なく、車両の接近を通知する技術を提供する。
【解決手段】通知装置10は、交差点を中心としたエリア内に設置される。アンテナ60、無線部62、FFT部64、復調部66は、車両に搭載された無線装置からの信号を受信する。検出部68は、受信した信号をもとに、車両が交差点に接近していることを検出する。通知部70は、検出した接近に関する情報を通知する。取得部72は、通知装置10が設置された交差点とは別のエリアに設置された信号機の点灯色に関する情報を取得する。通知部70は、車両の接近を検出した場合であっても、取得した情報に含まれた点灯色によっては、通知を延期する。
(もっと読む)
車両用灯具
【課題】安価な構成で所望の歩行者に対して情報を送信する。
【解決手段】車両用前照灯装置100は、光源を有し、車両進行方向に可視光を照射可能な前照灯ユニット210と、歩行者が携帯する受光部付き携帯機器に、前照灯ユニット210から照射された可視光を用いて信号を送信する信号送信部104と、を備える。信号送信部104が送信する信号には、自車両の存在を報知するための情報を含んでいてもよい。また、車両用前照灯装置100は、信号送信部104からの信号を受けて携帯機器が送信した歩行者信号を受信する信号受信部106と、前照灯ユニット210による配光パターンの形成を制御する照射制御部228と、を備え、照射制御部228が、信号受信部106による歩行者信号の受信状況に応じて前照灯ユニット210による配光パターンの形成を制御してもよい。
(もっと読む)
危険箇所推定装置及び危険箇所推定方法
【課題】実際に発生した交通事故に関する情報の蓄積がない場合であっても、交通事故の発生する危険度が高い危険箇所に関する情報を得ることを可能とする。
【解決手段】危険箇所推定装置1では、複数の移動端末の位置情報が位置情報取得部11により取得され、交通モードに示される移動手段が自動車及び徒歩である位置情報の各々が位置情報集計部14によりメッシュ毎に計数され、メッシュ毎に計数された交通モードが自動車である位置情報数及び交通モードが徒歩である位置情報数に基づいてメッシュ毎の危険度を示す危険度指標値が指標値集計部15により生成される。この危険度指標値は、ユーザの所在位置が逐次反映された位置情報に基づいて生成されることとなるので、交通事故に関する情報の蓄積を必要とせず、タイムリーに危険箇所の推定を行うことが可能となる。
(もっと読む)
撮像システム
【課題】追跡対象の位置および大きさをより正確に検出することができる。
【解決手段】交差点に設けられる撮像システムであって、前記交差点内を移動する歩行者を撮像する全体視撮像部と、予め定められた条件に基づいて、前記全体視撮像部の撮像データから追跡対象とすべき前記歩行者を特定する追跡対象特定部と、前記全体視撮像部の撮像素子における画素密度よりも高い画素密度の撮像素子を有し、前記追跡対象を追跡しながら撮像する複数の特定対象撮像部と、前記特定対象撮像部の撮像データに基づいて、前記追跡対象が事故に遭う危険性の高い危険状態であるか否かを判定する危険状態判定部と、を備えることを特徴とする撮像システムを提供する。
(もっと読む)
撮像システム
【課題】追跡対象の位置および大きさをより正確に検出することができる。
【解決手段】交差点に設けられる撮像システムであって、前記交差点内および前記交差点周辺を移動する複数の対象を撮像する全体視撮像部と、前記交差点に設置された一対の歩行者用信号および自動車用信号の少なくとも一方の点灯状態を示す信号情報を取得する信号情報取得部と、前記信号情報に基づいて、前記全体視撮像部の撮像データから事故の危険性の高い前記対象を追跡対象として特定する追跡対象特定部と、前記全体視撮像部の撮像素子における画素密度よりも高い画素密度の撮像素子を有し、前記追跡対象を追跡しながら撮像する複数の特定対象撮像部と、前記特定対象撮像部の撮像方向および焦点を制御する制御部と、を備えることを特徴とする撮像システムを提供する。
(もっと読む)
141 - 160 / 2,573
[ Back to top ]