
Fターム[5H180LL08]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音以外の警報であるもの (2,573)
Fターム[5H180LL08]に分類される特許
81 - 100 / 2,573
運転者状態推定装置及び運転者状態推定方法
【課題】運転者の有効視野角度の時間的な変化の発生要因を具体的に特定した上で運転者の状態を推定する。
【解決手段】自車両が停車中の状態が判定され、停車状態と判定された場合に視覚刺激が表示部に表示され、表示された視覚刺激が運転者により視認された場合の運転者の有効視野角度が導出されて記憶される。自車両が停車状態と判定される度に、運転者の有効視野角度が導出されるため、有効視野角度の相対的な変化量と運転者状態との関係が定められた所定の条件に応じて、運転者の状態を推定する。
(もっと読む)
車両の自動ブレーキ制御装置

【課題】本発明は、交差点内或いは交差点付近において誤作動を低減することのできる車両の自動ブレーキ制御装置を提供する。
【解決手段】ミリ波レーダで検出された障害物の位置情報及びGPSで検出された自車の位置情報から障害物位置判定部にて障害物の位置が交差点内或いは交差点付近であるか否かを判定し(S16〜S22)、判定結果をブレーキ制御部へ供給し、ブレーキ制御部では、障害物が静止物である場合には静止物用ブレーキ制御、障害物が移動物で且つ自車或いは障害物の位置が交差点内或いは交差点付近である場合には静止物用ブレーキ制御を行い(S26)、障害物が移動物で且つ自車或いは障害物の位置が前述以外の場合には移動物用ブレーキ制御を行い(S28)、警告灯、スピーカ及びブレーキ装置の作動タイミングを制御する。
(もっと読む)
駐車支援装置
【課題】駐車支援装置において、撮像された自車両の後方画像から駐車枠の白線と白線端点とを検出して画像表示の切換タイミングの精度を向上する。
【解決手段】制御手段9は、撮像された自車両の後方画像の歪みを補正して歪み補正画像にする歪み補正手段9Aと、撮像された自車両の後方画像を俯瞰画像に変換する画像変換手段9Bと、変換された俯瞰画像から駐車枠2の白線を検出する白線検出手段9Cと、検出された白線の白線端点を検出する白線端点検出手段9Dと、検出された白線端点と自車両との距離に基づいて表示手段8に表示する画像を歪み補正画像と俯瞰画像とのいずれかに切り換える表示切換制御手段9Eとを備える。
(もっと読む)
走行支援装置
【課題】走行支援装置において、自車両が旋回する場合に、安全に旋回できないことを早期に検出して自車両の走行を支援する技術を提供する。
【解決手段】CCDカメラ8で取得した路面ペイントの種類に基いて、自車両がこれから向かう交差点で右折又は左折の旋回を行う場合に限定できるか否かを判別する(S104)。自車両がこれから向かう交差点で右折又は左折の旋回を行う場合に限定できる場合に、ナビゲーション装置5から取得する交差点の情報と、車速センサ6が送信する自車両の速度と、に基いて、自車両の速度が安全に旋回可能な速度を超えているか否かを判別する(S106)。自車両の速度が安全に旋回可能な速度を超えていると判定された場合に、警報を発する(S107)。
(もっと読む)
安全運転サポート装置
【課題】ドライバの種類に応じた安全運転を簡易、正確、且つ十分にサポートすることが
できる安全運転サポート装置を提供すること。
【解決手段】安全運転サポート装置1は、1日の時刻毎の眠気度のパターンをドライバの
長期間にわたる勤務時間帯別に区分して設定しているので、現ドライバに合致したエンジ
ンスタート時や走行時における眠気度を判別することができ、該眠気度の判別結果に該当
する的確な安全サポートを実行することができる。よって、運転前や運転中において安全
サポートに応じた行動を現ドライバにとらせることが可能となり、安全運転を簡易、正確
、且つ十分にサポートすることができる。
(もっと読む)
車両接近警告送信装置、車両接近警告受信装置および車両接近警告システム
【課題】聴覚障害者にも有効な車両接近警告送信装置、受信装置を提供すること。
【解決手段】車両接近警告送信装置は、車両において、LEDを用いた前照灯などの外部に光を放射する発光手段、断続的に所定の変調信号を生成する信号生成手段、変調信号に基づいて発光手段の点灯、消灯を制御する制御手段とを備える。受信装置は、変調光を受光する光センサー手段、復調手段、変調信号の有無を判定する判定手段、変調信号が検出された場合に音声出力手段、振動出力手段、有線出力手段、無線出力手段の内の少なくとも1つの手段で情報を出力する出力手段を備える。また、無線出力信号を受信し、振動出力を発生させる子機を備えてもよい。聴覚障害者であっても車両の接近を認識することができる。
(もっと読む)
車両の自動ブレーキ制御装置
【課題】本発明は、より多くの場面で被害軽減の大きな効果を得ることができる車両の自動ブレーキ制御装置を提供する。
【解決手段】ミリ波レーダからの検出信号より障害物判定部(3a)にて障害物が移動物であるか静止物であるか或いは移動物から静止物となったものか等の障害物の状態を判定(S12,S16)し、判定結果をブレーキ制御部へ供給し、ブレーキ制御部では、自車と障害物の相対速度と障害物の状態とに基づいて、移動物及び移動状態から静止状態となった静止物については移動物用ブレーキ制御を行い(S14)、静止物については静止物用ブレーキ制御を行い(S18)、衝突予測時間算出部にて算出された衝突予測時間が各々の制御により設定された作動タイミングとなった時に警告灯、スピーカ或いは油圧アクチュエータへ作動信号を供給する。
(もっと読む)
車載用気象状況推定装置
【課題】本発明は、車載用気象状況推定装置に係り、車両が今後置かれるであろう将来の気象状況を推定することにある。
【解決手段】自車両とすれ違う対向車に向けて光を照射する照射手段と、照射手段により照射される光の反射光を受光する受光手段と、を設ける。そして、受光手段により受光される上記の反射光の受光パターンに基づいて、対向車の有無及び対向車が存在する場合における該対向車への水滴付着の有無を判別し、その判別結果に基づいて、自車両の進行方向の気象状況を推定する。
(もっと読む)
運転者覚醒度検査装置
【課題】運転者が運転に集中し易く、かつ精度に優れた運転者覚醒度検査装置の提供。
【解決手段】この覚醒度検査装置2は、運転者情報入力部16と、顔面皮膚温度を非接触で計測する顔面温度計測部8と、手指皮膚温度を計測する手指温度計測部10と、手指から脈拍数を計測する脈拍計測部12と、制御装置4と、記憶装置6とを備えている。この記憶装置6は、顔面皮膚温度、手指皮膚温度及び脈拍数の判定閾値を記憶している。この制御装置4は、計測した顔面皮膚温度、手指皮膚温度及び脈拍数から得られるデータと判定閾値とから運転者の覚醒度を判定している。好ましくは、運転者情報入力部61が、カメラ64と画像処理装置66と有する顔認識部63を備えている。顔認識部63から得られる画像データと顔面データとから運転者を特定される。
(もっと読む)
障害物検出装置
【課題】近距離においても物標の位置を精度良く得る。
【解決手段】センサ2で物標を検出する障害物検出装置1において、センサ2により物標が検出されていた状態から該物標が検出できない状態となったときに、センサ2により物標が検出されていた状態のときの該物標の位置及び速度情報と、センサ2で物標を検出することができなくなったときからの経過時間と、から、センサ2により物標を検出できないときの該物標の位置を推定する推定手段83を備える。
(もっと読む)
交差点衝突防止警告装置
【課題】十字路、Y字路及びT字路等の種々の形態の交差点の路面中央に埋め込んで、一式の検知用センサによって交差点への全進入路における車両や歩行者の進入及び位置を検知し、交差点に進入する夫々の車両や歩行者に対して他の進入路における車両や歩行者の進入及び位置情報を発信することが可能な交差点衝突防止警告装置を提供することにある。
【解決手段】本体2に回転自在に設けられた回転台4に取り付けられ該回転台4の回転により交差点の全進入路に対して車両や歩行者を検出する1つの検出用センサ7と、回転台4に取り付けられ反射部と非反射部が回転台の周方向に交互に周期的に設けられた光学スケール9と本体2に設けられた回転角検出器10とにより構成されて回転台4の回転量を検出するエンコーダと、本体2に設けられ交差点に進入する車両や歩行者の存在を警告する警告灯3を備えるようにした。
(もっと読む)
停止線認識装置
【課題】過大な演算負荷を発生させることなく、自車両の制御に必要な停止線を精度良く認識することができる停止線認識装置を提供する。
【解決手段】画像処理ユニット4は、自車走行路前方の信号機の認識を行い、自車走行路上の直前の信号機が設定距離L2以内の位置に存在し且つその信号機が赤信号であることを認識したとき、停止線認識モードへと移行して停止線の認識処理を実行する。これにより、不要な場面での停止線認識処理の実行を的確に排除することができる。従って、過大な演算負荷を発生させることなく、自車両1の制御に必要な停止線を精度良く認識することができる。
(もっと読む)
レーザー距離計とレーザーカメラを使用した艦船の海上衝突予防用補助監視装置
【課題】艦船が入出港時や他船で混み合う狭水道等を航行中、他船等の監視に対し船首中央から左右対称の一定角度内に限定した追加の監視手段を提供する。
【解決手段】船首最先端中央(下部)の船体に凹み又は追加の構造物を作り左右対称で放射線状にレーザービームが発射出来るように複数個のレーザー距離計を取り付け、支柱を常時往復移動させることでレーザービーム間の死角を無くすようにする。レーザービームの反射により得られた他船等との方位と距離を操船場所に表示、警報する。並行してレーザーカメラを同じ船首に固定装備し、船首前方を動画で撮影しその画面を同じ操船場所に表示する。両者の表示、警報及び映像を提供することで操船者に衝突回避の動作を起こさせるための艦船の海上衝突予防用補助監視装置。
(もっと読む)
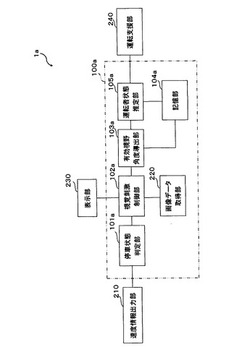
情報処理装置、入力方法、入力プログラムおよび記録媒体
【課題】移動体の移動中における操作入力を安全におこなえるようにすること。
【解決手段】情報処理装置100は移動体に搭載される。入力部101は、ユーザからの操作入力を受け付ける。取得部102は、移動体の移動状態に関する情報を継続的に取得する。判定部103は、移動状態に関する情報に基づいて、移動体が移動しているか否かを継続的に判定する。検知部104は、入力部101に対する物体の接近および接触を検知する。入力部101は、所定の操作入力を受け付けるにあたって、移動体が移動していると判定されている間は物体の接近を操作入力として受け付け、移動体が移動していないと判定されている間は物体の接触を操作入力として受け付ける。
(もっと読む)
車載安全制御装置及び安全運転支援システム
【課題】センサの検出範囲が衝突事故発生予測位置を含んでいない場合においても、精度の高い衝突危険性度合で警告可能な車載安全制御装置及び安全運転支援システムを得る。
【解決手段】TTC演算モデル判定部14Aは、路側移動体検出装置2が検出した移動体6(対象移動体)で、かつ、所定時間Th経過後に検出範囲Ld外に移動するものと判定される移動体(仮想移動体)が存在する場合、当該対象移動体の進行方向に設置されている信号機の灯色が赤から青に変化する時点において、当該対象移動体の速度が基準速度Va以下である場合に、加速モデルとして判定し、基準速度Vaを上回る場合は等速モデルとして移動モデルを判定する。TTC演算処理部15Aは上記移動モデルに用いて、対象移動体が衝突事故発生予測位置P点に到達する到達予測時間Tpを演算する。
(もっと読む)
操縦支援装置
【構成】カメラC_3は、車両に設けられて斜め上方向から地面を捉える。CPU16は、カメラC_3から出力された被写界像P_3を地面に対する鳥瞰画像に変換し、車両の前後方向の姿勢を定義するべく地面に描かれた複数の直線を表す線画像を鳥瞰画像から探索する。発見された線画像に現われた複数の線の平行性がエラー条件に合致する場合、CPU16は、バックギアの選択に応答して表示装置22に表示されるキャラクタ画像を点滅させる。
【効果】鳥瞰変換特性の異常に起因する事故を抑制することできる。
(もっと読む)
方向転換支援装置及び方法
【課題】車両の方向転換が可能か否かを運転者が精度良く判断可能なように支援する技術を提供する。
【解決手段】自車両の周囲を撮影した画像を取得し、前記画像を変換して俯瞰画像を生成し、自車両が最小回転半径で走行した場合の最小軌道を求め、自車の舵角を検出した舵角情報を取得し、前記舵角情報が示す舵角で自車が走行した場合の予想軌道を求め、前記最小軌道と前記予想軌道を前記俯瞰画像情報と重畳して表示装置に表示させる。
(もっと読む)
接近報知装置、および接近報知プログラム
【課題】自車両の接近を通行人に報知する接近報知装置において、通行人に対して必要充分な警報を行えるようにする。
【解決手段】接近報知システムにおいては、自車両周囲の通行人の位置の検出結果を取得し(S220)、予め通行人の位置と自車両および通行人が衝突する確率である衝突確率とが対応付けられた衝突確率マップを参照し、取得した通行人の位置に応じた衝突確率を抽出する(S300)。そして、抽出された衝突確率が所定の閾値よりも高い場合、警報を発する車外警報装置を作動させる(S120,S130)。つまり、常に車外警報装置31やライト32を利用して警報を行うのではなく、通行人を検出した上で、自車両と通行人との衝突確率が高い場合のみに警報を行うようにしている。よって、不要な警報が行われる煩わしさを防止するとともに、必要が警報を行うことができる。
(もっと読む)
車載装置および認知支援システム
【課題】車載装置のコスト低減を図るとともに、ドライバーの死角から自車両に接近する移動物体の検出漏れを防止しつつ、検出した移動物体の存在をドライバーに対して確実に認識させること。
【解決手段】歪曲した受光部により広角な範囲の映像を車載装置が撮像し、撮像された映像に基づいて撮像部の設置方向および設置方向以外の方向から自車両に接近する移動物体を車載装置が検出し、検出された移動物体と自車両とが衝突する可能性を示す衝突危険度を車載装置が判定し、判定された衝突危険度に応じて移動物体の存在を報知するように車載装置を構成する。
(もっと読む)
経路作成装置
【課題】演算時間と信頼性の双方を考慮して適切な走行経路を作成すること。
【解決手段】経路作成装置1は、開始点から目標点までの車両の走行経路を作成する装置である。この経路作成装置1は、空間上の経路を全探索することにより走行経路を作成する第1作成部17aと、空間上から確率的に抽出された点に基づいて設定されたノードを順次接続することで走行経路を作成する第2作成部17bと、車両の状況又は該車両の周辺の状況を検出する手段(障害物検出装置11や白線検出装置12など)と、検出された状況に基づいて第1作成部17a及び第2作成部17bのいずれか一方を走行経路を作成するための手段として選択する選択部17cと、を備えることを特徴とする。
(もっと読む)
81 - 100 / 2,573
[ Back to top ]