
Fターム[5H180LL08]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音以外の警報であるもの (2,573)
Fターム[5H180LL08]に分類される特許
21 - 40 / 2,573
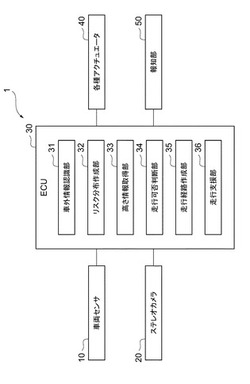
走行支援装置
【課題】水平方向のリスクポテンシャルと認識された障害物が自車両の走行に影響を与えない場合における不必要な走行支援を抑制することが可能な走行支援装置を提供する。
【解決手段】本発明の一実施形態に係る走行支援装置1は、自車両周辺の対象物を認識する車外情報認識手段31と、対象物各々の水平方向のリスクポテンシャルの分布を作成するリスク分布作成手段32と、水平方向のリスクポテンシャルの分布におけるリスクポテンシャルの高さ情報を取得する高さ情報取得手段33と、リスクポテンシャルの高さ情報が自車両の車高に対して所定値以上である場合、リスクポテンシャルの発生位置は走行可能であると判断する走行可否判断手段34と、リスクポテンシャルの発生位置が走行可能である場合には、リスクポテンシャルの発生位置を自車両の走行経路とする当該走行経路作成手段35と、を備える。
(もっと読む)
車載用電子機器及びプログラム

【課題】シフトレバーの操作や状態を忘れて、自己の意志と異なる方向へ発進してしまうことを防止することのできる車載用電子機器を提供する。
【解決手段】走行状態から停車状態になったことが検出され、シフトポジションがDレンジであることが検出されたことを前提に、「前進します。」という音声による警告を行い、走行状態から停車状態になったことが検出され、シフトポジションがRレンジであることが検出されたことを前提に、「バックします。」という音声による警告を行う。このとき、ドライバーの顔の向きを検出し、検出した顔の向きも加味して警告を報知する。
(もっと読む)
車両周辺障害物検出装置
【課題】障害物を検出する各センサにおいて、障害物検出処理が困難な環境条件に対して適合的に調整を行い、安定性の高い障害物の検出を実現する。
【解決手段】処理パラメータを参照して、超音波により障害物のセンシングを行う超音波センサ101と、処理パラメータを参照して、センサ出力値に基づいて障害物の情報を検出する超音波信号処理部102と、処理パラメータを参照して、障害物の映像を撮影するカメラ103と、処理パラメータを参照して、撮影された映像に基づいて障害物の情報を検出する映像処理部104と、超音波信号処理部102により検出された障害物の情報と映像処理部104により検出された障害物の情報とを統合して映像を生成する障害物統合検出部105と、生成された映像を表示する表示装置106と、障害物の情報に基づいて、処理パラメータを調整するパラメータ調整部109とを備えた。
(もっと読む)
駐車支援装置
【課題】駐車支援に不慣れな運転者に対しても的確に支援が開始され、運転者がその支援内容を容易に理解することができる駐車支援装置を提供する。
【解決手段】撮影装置12により撮影された周辺画像を取得する画像取得部2と、少なくとも周辺画像を表示装置20に表示させる表示制御部3と、駐車目標位置に駐車する際に複数工程の各工程ごとに規定される運転操作を、文字及び図形の少なくともいずれかにより示す操作ガイドを生成する操作ガイド生成部4と、操作ガイドと対応し、操作ガイドよりも表示面積の小さい操作アイコンを生成する操作アイコン生成部5と、各工程において運転操作が行われない状態で予め設定した時間が経過すると、当該工程の操作ガイドを周辺画像に重畳表示させた状態とし、この状態から運転操作が開始されると、操作ガイドに代えて操作アイコンを重畳表示させた状態とする重畳制御部6と、を備えた。
(もっと読む)
車両情報表示装置
【課題】 交差点等で右折をしようとしている対向車に対して、自車は停止して対向車を先に右折させようとしていることを対向車に通知する車両情報表示装置を提供する。
【解決手段】 目的地までの経路を案内するとともに、自車が直進する経路の地点を自車と反対方向に進行する対向車が右折しうる交差地点を抽出するナビゲーション手段を用いて、交差地点の手前のある地点で検出した速度情報を規定値と比較することによって交差地点で自車が停止すると判定すると、対向車に対して右折を促すように前方表示を行う。
(もっと読む)
物体認識装置
【課題】撮影画像のコントラストを、当該撮影画像に含まれる道路上の物体を認識するのに最適な状態に調整することができる技術を提供する。
【解決手段】他車両や落下物などの物体が存在する蓋然性の高い道路14部分と、車線(道路14)に沿って道路14上に描かれている白線13とに着目し、特に、白線13部分と道路14部分とのコントラストが強調されるように上方視の画像tFのコントラストを調整することにより、道路14上に物体が含まれているときには、道路14部分と物体との境界が極めて明りょうとなり、上方視の画像tFのコントラストを、上方視の画像tFに含まれる道路14上の物体の認識に最適な状態に調整することができる。したがって、コントラストが画像処理による物体認識に最適な状態に調整された上方視の画像tFを処理することで確実に道路14上の物体を認識することができる。
(もっと読む)
運転支援装置
【課題】運転支援装置において、他車両の運転者がウインカを出し忘れていても、他車両の経路誘導情報から衝突可能性を判定することにある。
【解決手段】制御装置(4)は、特定された他車両のウインカ情報と経路誘導情報とを取得し、特定された他車両のウインカ情報が指し示す進行方向と経路誘導情報が指し示す進行方向とを比較して、ウインカ情報は直進を指し示しているが、経路誘導情報は右折又は左折を指し示す場合に、特定された他車両と自車両とが特定された交差点において衝突する可能性があると判定する衝突可能性判定手段(15C)を備え、他車両と自車両とが衝突する可能性があると判定された時に自車両の運転者に警告するために警告手段(13、14)を作動制御する。
(もっと読む)
距離認識装置
【課題】自車から遠い位置の物体が撮影画像に含まれている場合に、自車から物体までの距離の認識精度の向上を図ることができる技術を提供する。
【解決手段】各エッジhEG,lEG,rEGに基づいて距離算出手段により算出された自車から物体までの距離Zに基づいて自車から物体までの距離が認識手段6eにより認識されるため、自車から遠い位置の物体が撮影画像Fに含まれているときに、各エッジhEG,lEG,rEGに基づいて距離算出手段6dにより算出される各距離Zが自車と物体との実際の距離とずれるおそれがある場合であっても、それぞれ異なる方法で算出される各距離Zに基づいて自車から物体までの距離Zが認識されるため、認識される距離が実際の距離Zから大きくずれることが防止され、自車から物体までの距離Zの認識精度の向上を図ることができる。
(もっと読む)
車両ランプシステム
【課題】自車の走行の優先度をランプの点灯状態によって報知することで、他車における不要な操作を無くし、安全走行を確保するとともに車両の円滑な走行を確保する車両ランプシステムを提供する。
【解決手段】自車の走行情報を検出する自車走行情報検出手段14と、他車の走行情報を検出する他車走行情報検出手段他15と、自車走行情報と他車走行情報に基づいて自車と他車の優先度を演算する優先度演算手段16と、得られた優先度に基づいて自車のランプHL,TSLの点灯形態を変化制御するランプ制御手段17を備える。他車のランプの点灯形態を視認することで自車間の優先度を確認し、これに対応した走行を行うことで円滑な走行が可能になる。
(もっと読む)
運転支援装置、及び運転支援方法
【課題】安全運転のための情報を運転者の注意状態に応じて適切に提供すること。
【解決手段】入力部2で計測された信号を元に注意すべき物体を検出する注意物体検出部3では、すぐに危険ではないが注意すべき一つ以上の物体を抽出する。運転者1に装着された生体信号検出部4で計測された脳波の信号を解析し、注意量推定部5で注意量が推定される。情報決定部6では、注意量推定部5から得られる注意量に基づき、注意物体検出部3にて検出された物体のうち、どの情報を運転者1に呈示するかを決定する。例えば、運転者1の注意量が低下した場合には、多くの物体を呈示すると運転の妨げになるために、表示個数を減らす制御が行われる。
(もっと読む)
対象物の位置を算出するための装置
【課題】車両の挙動如何にかかわらず、撮像された画像から検出された対象物の位置を、より良好な精度で判定する。
【解決手段】車両に搭載されたカメラを用いて車両の周辺を撮像し、撮像された画像に基づいて、実空間において車両から所定値以上の距離を有し、かつ所定値以上の高さに位置すると推定される遠方物体を検出する。また、撮像された画像に基づいて、所定の対象物を検出する。画像上において、該検出された遠方物体に含まれる所定の点を基準として、該検出された対象物に含まれる所定の点の位置を特定する。該画像上の該特定された位置に基づいて、実空間上の対象物の位置を算出する。画像において、遠方物体に対する対象物の相対的な位置関係は、車両のピッチング等の影響を受けないため、該ピッチング等の影響を受けることなく、対象物の実空間上の位置を求めることができる。
(もっと読む)
車両周辺監視装置
【課題】検出結果の正確性を明確にし、運転者が物体の存在する位置を直感的に把握することができるように報知する車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置100は、車両の周囲の物体を検出する物体検出部11と、車両の上方を視点とする車両のイメージ画像を生成する車両イメージ画像生成部14と、車両のイメージ画像を含む、車両の周囲のイメージ画像を生成する周囲イメージ画像生成部15と、物体検出部11の検出結果に基づいて周囲のイメージ画像において対応する位置を演算する位置演算部13と、物体検出部11の検出結果の確証度が予め設定された判定閾値以上である場合に、周囲のイメージ画像での対応する位置を明示すると共に、検出結果の確証度が判定閾値未満である場合に、周囲のイメージ画像での対応する領域を明示する明示部16と、を備える。
(もっと読む)
車両制御装置
【課題】自車両周囲に車々間通信できない他車両が存在して、協調走行制御の安全性に影響を与えないようにする。
【解決手段】車々間通信できない他車両のうち、協調走行制御の制御内容に影響を与える他車両を検出し、協調走行制御の制御内容を変更する。車々間通信により前方車両と所定の車間距離を保持しつつ追従走行する制御中は、前方車両との車間距離を長く設定する。
(もっと読む)
衝突防止装置
【課題】誤動作のおそれが小さく、移動体同士の衝突を防止する効果をより大きくすることができる衝突防止装置を提供する。
【解決手段】衝突防止装置34は、それぞれ異なる方向から近づいてくる移動体を光により検出するための車両検知・警告レーザユニット60,62と、車両検知・警告レーザユニット60,62の各々により移動体が検出されたことに応答して、当該移動体のうち少なくとも一方に対し、レーザ描画装置54などを用いて他方の移動体の存在を告知することにより移動体同士の衝突を防止するための制御装置68とを含む。
(もっと読む)
駐車支援システム
【課題】各種障害物を含む駐車支援用の映像提供を車両側の負担を極力少なくして行えるようにする。
【解決手段】駐車施設Tが、駐車スペース1を上方から撮像するカメラCと、カメラCで撮像された車両Vおよびその周囲の映像を含む駐車支援情報を生成する映像処理部12を有する。駐車支援用の映像が、映像処理部12から双方向通信によって車両Vに送信される。映像処理手段12は、カメラCによる撮像タイミングから駐車支援情報が車両Vに搭載された表示画面35aに表示されるまでの遅延時間の間での車両の移動を推定して、該推定された移動後の車両の外形を駐車支援情報中に表示する。
(もっと読む)
車両制御装置
【課題】車々間通信できない他車両のうち、協調走行制御の制御内容に影響を与える他車両を検出し、画面上でその他車両を強調して表示する。
【解決手段】車々間通信機能を有していない他車両であって、自車両の協調走行制御の制御内容を変更する可能性のある制御対象車両を特定し、その車両のアイコンを地図画面上で強調表示する。
(もっと読む)
駐車支援システム
【課題】各種障害物を含む駐車支援用の画像提供を車両側の負担を極力少なくして行えるようにする。
【解決手段】駐車施設Tが、駐車施設T内の物体を検出するセンサ類19と、駐車スペース1を上方から撮像するカメラCと、カメラCで撮像された車両Vおよびその周囲の映像を含む駐車支援情報を生成する映像処理部12を有する。駐車支援用の画像が、映像処理部12から双方向通信によって車両Vに送信される。駐車支援用の画像は、センサ等19で検出された非定常物(例えば買物カートや人間)のデータを含むものとして生成される。
(もっと読む)
白線認識装置
【課題】自車両にピッチングが生じても白線を正確に認識できる白線認識装置を提供すること。
【解決手段】自車両の前方の道路を含む領域の画像を撮影する撮影手段3と、前記撮影手段3により撮影される画像の1フレームごとに、道路における白線のエッジを抽出するエッジ抽出手段7と、前記エッジ抽出手段7により抽出された前記白線のエッジを、前記1フレームごとに順次記録し、前記白線のエッジの履歴を作成する履歴作成手段7と、前記白線のエッジの履歴を用いて、前記白線を認識する白線認識手段7と、前記自車両のピッチングを検出するピッチング検出手段7とを備え、前記履歴作成手段7は、前記ピッチングが検出されたときに撮影されたフレームにおける前記白線のエッジは、前記履歴に含めないことを特徴とする白線認識装置1。
(もっと読む)
障害物検出装置、及び障害物検出方法
【課題】道路遠方の障害物の検出ができ、障害物を検出する処理で必要とされる記憶領域の容量を抑えて処理負荷の軽減を図ることが可能な技術を提供する。
【解決手段】車両から撮影された画像から、該車両が走行する道路の領域としての画像領域を抽出し、抽出された画像領域における遠方領域を拡大して拡大画像を生成し、生成された拡大画像を記憶し、記憶された時間的に前後する拡大画像を比較するため、車両の速度に関する速度情報に基づいて車両の移動距離を算出し、時間的に前の拡大画像を該移動距離に応じた変換拡大画像に変換し、拡大画像と変換された変換拡大画像とを比較して両画像の異なる点を障害物として検出し、検出した検出結果を出力する。
(もっと読む)
前方確認アシスト装置および前方画像への切り替え方法
【課題】ナビゲーション画像等から前方画像への表示切り替えが交差点進入時以外の無用なタイミングでは行われないようにすることが可能な「前方確認アシスト装置および前方画像への切り替え方法」を提供する。
【解決手段】車両の速度や減速加速度ではなく、ブレーキの踏み込み強度および踏み込み積算時間に基づいて、車載カメラ102により撮影された前方画像への表示の切り替えを制御することにより、渋滞時のノロノロ運転等により単に車両の速度が所定速度以下になったり、一時的に減速されたりしただけの状況では、前方画像への表示の切り替えは行われず、ブレーキの踏み込み強度や踏み込み積算時間により表わされるブレーキの踏み込み状況から、運転者が車両を停止させようとしていると推測されるときにだけ、ディスプレイ104の表示が前方画像へと切り替わるようにする。
(もっと読む)
21 - 40 / 2,573
[ Back to top ]