
Fターム[5H180LL08]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音以外の警報であるもの (2,573)
Fターム[5H180LL08]に分類される特許
41 - 60 / 2,573
運転支援装置
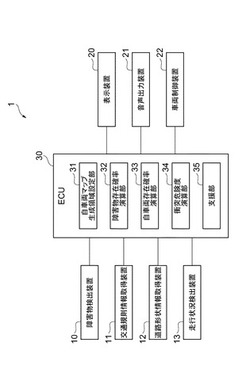
【課題】自車両周辺の移動体の将来の移動状態を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置1であって、移動体の現在の移動状態を取得する移動状態取得手段10と、取得した移動体の現在の移動状態に基づいて移動体の将来の移動状態を予測する移動状態予測手段32と、移動体周辺の交通規則情報を取得する交通規則情報取得手段11を備え、移動状態予測手段32は、取得した交通規則情報を用いて移動体の将来の移動状態を予測することを特徴とする。
(もっと読む)
車両周囲監視装置

【課題】本発明は、車外の人に対する警告を、人の顔向きで判断し、自車両の方を向いているか否かの判断を行い、自車両の方を向いていない場合のみ、注意喚起を行うことができる車両周囲監視装置を提供する。
【解決手段】人感知手段4は、撮像手段1で撮像した画像と人感知パターン記憶手段8の人感知パターンを比較して、車両周囲に人が存在するかどうかを確認する。人感知手段4が人を感知した場合、顔検知手段5が人の顔向きを判断し、車両周囲の人の両目を検知しない場合のみ、警告出力手段6により車両周囲の人へ注意喚起を行う。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の対象物を確実に抽出して、速やかに運転者に知らせることが可能な車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、車両に搭載され、該車両の周辺の物体の位置を特定する物体位置特定手段と、車両に搭載され、該車両の周辺の画像を取得する撮像手段と、撮像手段により取得された画像を多値化する多値化手段と、物体位置検出手段が特定した物体の位置に対応する前記取得された画像に、該物体の位置の各々に対応する所定サイズのマスクを設定するマスク設定手段と、マスク設定手段により設定されたマスク毎に、対応する画像を多値化する際のしきい値を設定する多値化しきい値設定手段と、多値化手段により、対応する多値化しきい値を用いて多値化された画像に基づき所定の対象物の有無を判定する判定手段と、を備える。
(もっと読む)
車両制御システム、その制御方法、及び制御プログラム
【課題】安全性と利便性を最適に両立した車両制御システム、その制御方法、及び制御プログラムを提供すること。
【解決手段】車両制御システム10は、車両周辺の混雑の度合いを示す混雑度を検出する混雑度検出手段と、混雑度検出手段により検出された車両周辺の混雑度に基づいて、車両の最高速度を設定する速度設定手段と、を備えている。また、速度設定手段は、混雑度検出手段により検出された車両周辺の混雑度が増加するに従って、車両の最高速度を減少させる。
(もっと読む)
車両用注意喚起装置
【課題】対向右折車両の運転者に対し、自車両の死角に後続直進車両が存在することを報知することで、対向右折車両と後続直進車両の衝突事故を防ぐ車両用注意喚起装置の提供。
【解決手段】自車両の周囲に存在する他車両を検出する他車両検出手段と、第1他車両および第2他車両の運転者が自車両により形成される死角によって相互に相手他車両を視認できないために当該第1他車両と当該第2他車両が衝突する危険性がある状況を、上記他車両検出手段の出力に基づき検出する危険状況検出手段と、上記危険状況検出手段により上記状況が検出された場合、上記第1他車両および上記第2他車両の少なくともいずれか一方の運転者に対し、相手他車両の存在を報知する報知手段とを備える。
(もっと読む)
脇見警報装置
【課題】運転者の脇見状態の詳細に応じた適切な警報を行なう。
【解決手段】脇見警報装置10は、運転者の注視あるいは脇見が、視線方向のみに拠る状態(視線注視)であるか、顔向き方向に拠る状態(顔向き注視)であるかを判定する注視判定部23及び脇見判定部25を備える。注視判定部23は、視線方向又は顔向き方向が記憶部24に記憶された注視方向領域内に注視判定時間に亘って含まれる場合に、運転者が特定対象物を注視する状態であると判定する。脇見判定部25は、視線方向又は顔向き方向が、記憶部24に記憶された脇見方向領域内に脇見判定時間に亘って含まれる場合に、運転者が脇見状態であると判定する。顔向き注視での注視判定時間及び脇見判定時間は、視線注視での注視判定時間及び脇見判定時間よりも短く設定されている。
(もっと読む)
運転状態判断装置
【課題】本発明は、運転中に運転手のシートに作用する圧力分布を検出することにより運転手の覚醒状態を適切に判断することが可能な運転状態判断装置を提供する。
【解決手段】本発明の運転状態判断装置では、少なくとも運転手のシートバックおよびシート座部に作用する圧力分布を検出する圧力検出手段と、前記圧力検出手段により検出された圧力分布の変化に基づいて運転者の覚醒状態を判断する判断手段とを備えている。また、
前記判断手段は、検出された圧力分布の変化に周期性を有するか否かに基づいて運転者の覚醒状態を判断する。
(もっと読む)
案内提供サーバ、方法、プログラムおよびシステム
【課題】車両の走行挙動に対応した走行支援機能を車載端末に実行させる技術の提供。
【解決手段】車両の走行挙動に関する複数の状況項目のそれぞれについての状況値を含む走行データを前記車両から取得し、前記走行データにおいて前記状況値が理想条件を満足しない前記状況項目を対象項目として特定し、前記対象項目についての前記状況値が前記理想条件を満足するための支援を行う走行支援機能を前記車両に備えられた車載端末に実行させるプログラムを対象プログラムとして特定し、前記対象プログラムを提示させる案内情報を前記車載端末に送信する。
(もっと読む)
運転支援装置
【課題】運転者に対して、駐車開始を実行する際の位置合わせの精度を向上させるための情報を提供したい。
【解決手段】生成部22は、車両に設置された少なくともひとつの撮像装置によって撮像された画像をもとに、車両周辺の鳥瞰図画像を生成する。予想軌跡記憶部30は、鳥瞰図画像に対応すべき車両の予想軌跡であって、車両のハンドルを操作して車両を移動させる場合の予想軌跡をハンドルの舵角を変えながら複数記憶する。合成部32は、予想軌跡記憶部30において記憶した複数の予想軌跡を鳥瞰図画像に重畳して表示する。
(もっと読む)
運転支援装置
【課題】運転者の運転中のストレスを十分に解消する。
【解決手段】運転支援装置1は、車両の運転者の運転中におけるストレス解消行動を検出したときに、所定の制御を実施することにより車両の運転支援を実施するために、自車両が走行している環境に関する情報である走行環境情報、及び自車両の走行状態に関する情報である走行状態情報に基づき安全度を判定し、安全度が所定値以下でない場合に運転者のストレス解消行動を許容するような制御を実施する。これにより、運転の安全性が確保された上で、運転者はストレス解消行動を行うことができる。従って、運転者の運転中におけるストレスが十分に解消されることとなる。
(もっと読む)
運転評価情報表示装置
【課題】運転中のドライバに余計な負荷をかけることなく、運転操作に対する評価結果をドライバが直感的に理解可能とする。
【解決手段】運転状態検出部2で車両の運転状態を検出し、評価部3で運転状態とドライバの運転操作とに基づいて安全運転の度合い(安全運転度)を評価する。そして、表示制御部4で評価部3の評価結果に基づいてディスプレイ1bに表示する画像信号を生成・制御する。ディスプレイ1bへの画像表示は、図形の形状や表示色の変化等の抽象表現によって安全運転状態を表し、運転中のドライバにとって直感的に分かり易い表現とする。例えば、ディスプレイ1bの画面に右から左へスクロールする所定周期の波の画像を表示し、その形状、表示色、周期が安全度に応じて変化するように制御する。これにより、運転中のドライバに余計な負荷をかけることなく運転操作に対する評価結果をドライバが直感的に理解し易くする。
(もっと読む)
覚醒支援装置
【課題】「刺激が弱すぎて覚醒支援の効果が現れない」という状況を避けつつ、驚愕反応を抑制すること。
【解決手段】覚醒支援中であるかを判定し(S1210)、覚醒支援中でないと判定すると(S1210NO)、眠気レベルが閾値以上であるかを判定する(S1220)。眠気レベルが閾値以上であると判定すると(S1220YES)、覚醒支援開始を希望するかを質問する(S1230)。そして、上記質問をしてから所定時間以内に、覚醒支援の開始を希望する旨の入力があったかを判定する(S1240)。覚醒支援の開始を希望する旨の入力があったと判定すると(S1240YES)、覚醒支援を開始する(S1270)。そして、驚愕反応が出たかを判定する(S1275)。驚愕反応が出たと判定すると(S1275YES)、刺激強度を1段階引き下げる(S1280)。その後、覚醒支援の効果が現れない場合は、刺激の強度を強くする。
(もっと読む)
運転支援装置
【課題】簡易な方法で、画像認識の妨げとなるようなものが走行路面に存在していても、安定したLKA制御およびLDW制御を行うことのできる運転支援装置を提供する。
【解決手段】運転支援装置は、車両前方を撮像する撮像手段と、撮像手段が撮像した画像から走行路面の区画線を検出し、走行レーンを設定する設定手段と、当該走行レーンに沿って走行できるように車両の運転者が行うハンドル操作を補助する操舵補助手段と、車両が区画線から逸脱することが予想される場合に警告する警告手段と、撮像手段が撮像した画像から道路標識および道路標示の少なくとも一方を検出し、当該検出結果に基づいた情報を道路情報として算出する道路情報算出手段と、当該道路情報に基づき区画線の検出精度が低下すると予想される場合、操舵補助手段が行う補助動作および警告手段が行う警告動作を抑制する動作抑制手段とを備える。
(もっと読む)
車載撮像装置
【課題】撮像画像の不可視領域により車載撮像装置の視覚補助機能が妨げられることを防止できる車載撮像装置を提供する。
【解決手段】車両に搭載される撮像手段1と、車両の位置を検出する位置検出手段5と、撮像手段1で得られた画像と位置検出手段5で検出された位置情報とを関連づけて記憶する記憶手段17と、撮像手段1で撮像された画像に不可視領域が存在するか否かを判断する不可視領域判断手段13と、不可視領域判断手段13により画像に不可視領域が存在すると判断されたとき、位置検出手段5で検出された車両の位置と一致する過去画像を記憶手段17より抽出し、過去画像を撮像手段で撮像された現在画像に合成する画像合成手段14とを備える。
(もっと読む)
撮像装置
【課題】外部からの入射波による影響を低減し、撮像された対象者画像の鮮明さを向上させることが可能な撮像装置を提供すること。
【解決手段】被投影面6上に投影された対象者6の画像を撮像する撮像手段2と、被投影面6と撮像手段2との間の光路L2上に設けられ、被投影面6の対象者D側からの入射波L2による反射波L2及び被投影面6の対象者D側とは反対側からの入射波L4を透過又は反射させた状態である第1の偏光状態を実現する第1の偏光手段22Aと、被投影面6と撮像手段2との間の光路L2上に設けられ、被投影面6の反対側からの入射波L4を透過又は反射させた状態である第2の偏光状態を実現する第2の偏光手段22Bとを備える構成とする。第1の偏光状態での撮像画像と、第2の偏光状態での撮像画像との差分画像を生成し、被投影面の反対側からの入射波を考慮して、画像の鮮明さを向上させる。
(もっと読む)
車両用ノイズキャンセル装置及び車両用ノイズキャンセルシステム
【課題】ノイズキャンセル実行及び不実行を選択できると共に、ノイズキャンセル実行選択時であっても車両走行状況によってノイズキャンセルを実行或いは停止できるようにする。
【解決手段】車両用ノイズキャンセル装置2は、車両に発生するノイズを収集するマイク6と、制御部5と、ノイズキャンセル選択スイッチ12と、ナビゲーション装置10と、消音用スピーカ9とを備え、前記制御部5は、ノイズキャンセル選択スイッチ12がオンのときには、ナビゲーション装置10が取得した車両走行状況が、ノイズキャンセル実行条件を満足したときに、消音用スピーカ9により消音用音波を出力し、ノイズキャンセル選択スイッチ12がオフのときには消音用音波を出力しない。
(もっと読む)
車両制御装置
【課題】妥当性が高い自車両のリスクポテンシャルの算出を可能とする車両制御装置を提供する。
【解決手段】車両制御装置1は、自車両の走行環境を認識する走行環境認識部21と、自車両周辺の障害物を認識する障害物認識部23と、車両と障害物との衝突事故に関する過失割合情報データベース15aを格納するDB記憶部15と、走行環境認識手段21で得られる走行環境と、障害物認識手段23で得られる障害物の状態と、DB記憶部15を参照して得られる過失割合情報と、に基づいて、自車両と障害物との衝突事故が発生したと想定した場合における自車両の想定過失割合を算出する想定過失割合算出部25と、を備え、想定過失割合が高いほど、障害物との関係におけるリスクポテンシャルを高く算出する。
(もっと読む)
運転支援装置
【課題】切り返しを行わずに最初から駐車枠に平行に駐車を行うことをより容易にできるようにする運転支援装置を提供する。
【解決手段】車載カメラによって撮像された車両後方画像から検出した車幅方向の駐車区画線をもとに、自車両が当該駐車区画線に対して略平行になるタイミングを判定し、駐車枠に自車両が駐車を完了する前において、ステアリングセンサで検出したステアリング角度が所定値以上であった場合であり、且つ、駐車支援ECUでの駐車傾き判定処理で自車両が当該駐車区画線に対して略平行になったタイミングを判定した場合に、表示器に切り戻し案内表示を行う。
(もっと読む)
運転支援装置
【課題】自車両と他車両との衝突可能性判定の精度を上げることができ、自車両の走行している道路と平行な道路を走行する他車両が衝突する可能性があると誤判定することを防ぐことができる運転支援装置を実現する。
【解決手段】自車両情報取得手段と、他車両情報取得手段と、衝突可能性判定手段を備える運転支援装置において、前記衝突可能性判定手段は、自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線と自車両位置との間の最短距離を算出し、この最短距離が予め設定された距離未満である時に自車両と他車両とが衝突する可能性があると判定する。
(もっと読む)
周辺監視装置
【課題】運転者の注意力を重要な障害物に集中させることができる周辺監視装置の提供。
【解決手段】車両の進行方向の状況を監視する周辺監視装置であって、上記車両の進行方向を含む領域を撮像する撮像部と、上記撮像部が得た撮像画像に基づき、上記領域にある障害物を検出する障害物検出部と、上記車両の運転者の心理状態を検出する心理状態検出部と、上記障害物検出部が検出した障害物のうち、上記注意喚起枠で囲う障害物の数を、上記心理状態検出部が検出した心理状態に基づいて設定する注意喚起対象設定部と、上記注意喚起対象設定部で設定された数の障害物を個別に囲う注意喚起枠を上記撮像画像に重畳する重畳部と、上記注意喚起枠が重畳された上記撮像画像を表示する表示部とを備える。
(もっと読む)
41 - 60 / 2,573
[ Back to top ]