
Fターム[5H180LL11]の内容
Fターム[5H180LL11]に分類される特許
41 - 55 / 55
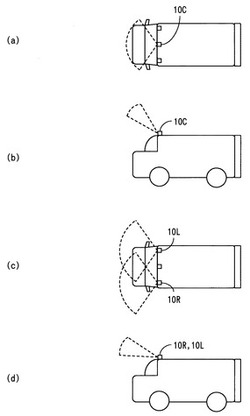
車両通行判定装置
【課題】 通行可能性を的確に判定し、通行可能である場合に通行方法を提供すること。
【解決手段】 車両の上方向やや前方向に指向性を有し、少なくとも車両のルーフの左右の端部間を検出範囲とし、この検出範囲内に存在する障害物を検出する超音波センサ10Cと、車両の水平方向やや上方向に指向性を有し、車両のルーフの左右の端部間とその外側の一定範囲を検出範囲とし、この検出範囲内に存在する障害物を検出する超音波センサ10L、10Rと、を備えて、これら各センサの検出結果を総合して車両の通行判定を行う。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両

【課題】
複数の異なる情報を運転者にわかりやすく伝達する車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両のレーンマーカに対する接近度合と自車両に作用する横加速度とを検出する。さらに、運転者が体格に応じて設定した運転席シートのサイドサポートの調整量を検出する。自車速が低速の場合は、体格に応じた調整量だけサイドサポートを回動し、中速の場合は運転者の着座姿勢を保持するように横加速度に基づく制御量でサイドサポートを回動し、高速の場合は、自車両が自車線を維持して走行するようにレーンマーカに対する接近度合に基づく制御量でサイドサポートを回動する。車速領域が変化し、伝達する情報の内容が変化する場合は、所定時間が経過するまで変化直前の制御量を維持し、情報が変化することに対する運転者の理解を促す。
(もっと読む)
車両用走行支援装置
【課題】
運転者の認知・判断・操作を補助する車両用走行支援装置において、カメラ等の画像センサで撮像した画像データの処理に要する時間を短くすると共に、障害物の認知の精度を向上させることが可能な車両用走行支援装置を提供することを課題とする。
【解決手段】
自車両の位置情報と車車間通信により得られた周囲車両A1の位置情報とから周囲車両A1の相対位置を算出し、該相対位置に基づいて画像センサ11による撮像画像Sの処理領域を限定し、予め記憶されたテンプレートT0を周囲車両A1の位置情報に基づきスケール変換して得られるテンプレートT1を撮像画像S中の周囲車両A1の画像とを比較して周囲車両A1の位置を正確に検出し、自車両と周囲車両A1との接触部位及び接触角度の推定を行い、これに基づいて乗員保護装置15〜18を作動させる。
(もっと読む)
車間制御装置、および車間制御方法
【課題】 取得した車間距離データに基づいて、自車両の車間距離を制御すること。
【解決手段】 制御装置104は、カメラ101で撮像した画像内から前方を走行する前方車両を検出し、検出した前方車両への自車両の近接および隔離を検出して、その検出結果に基づいて、自車両の前方車両への追従走行の状況を判定する。そして、自車両が前方車両追従して走行していると判定した場合に、自車両と前方車両との間の車間距離データを取得し、取得した車間距離データに基づいて、自車両と前方車両との間の車間距離を制御する。
(もっと読む)
物体検出装置
【課題】 検出した物体に高精度な情報を設定できる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、判断手段8で同一物体と判断した物体については、レーダ検出手段2によって検出した当該物体の横方向のデータと画像検出手段3によって検出した当該物体の横方向のデータとの位置関係に基づいて横幅及び/又は横位置の設定方法を変更することを特徴とする。
(もっと読む)
走行可否判定装置及び走行可否判定方法
【課題】 障害物が存在した場合、障害物が存在しても移動体が通行可能であるか否かを判定することができる走行可否判定装置などを提供する。
【解決手段】 移動体の周囲を撮影する撮像手段101と、第1の画像領域に物体があるか判断する第1の判断手段103と、撮像手段から物体までの距離を計測する距離計測手段104と、計測された距離と画像上の撮像手段から物体までの距離とから第1の判定値を算出する第1の算出手段103と、第1の判定値から移動体が通行可能かを判定する判定手段106と、第2の画像領域に移動体からの突出物体があるか判断する第2の判断手段105と、計測される撮像手段から突出物体までの距離と画像上の撮像手段から突出物体までの距離とから、第2の判定値を算出する第2の算出手段105と、第2及び第1の判定値に基づき、移動体が通行可能かを判定し通行不可の場合警報を発する警報手段107とを備える。
(もっと読む)
安全車間距離表示装置
【課題】 本発明によれば、先行車との車間距離を検出する車間距離検出手段を備えていない車両において、最小限の情報量で安全車間距離を表示する安全車間距離表示装置を提供する。
【解決手段】 車両の車速を検出する車速検出部10と、路面に対する前記車両のタイヤの摩擦係数を推定する摩擦係数推定部60と、前記車速検出部10が検出した前記車速と前記摩擦係数推定部60が推定した前記摩擦係数に基づいて、先行車との安全車間距離を算出する安全車間距離算出部40と、前記安全車間距離算出部40が算出した前記安全車間距離を表示する表示部50とを備える。
(もっと読む)
方向転換支援システム
【課題】 Uターン又は切り返しによる車両の方向転換を支援する方向転換支援システムを提供すること。
【解決手段】 ナビゲーションシステム11と、自車両の回転半径に関する回転半径情報が記録された回転半径情報記憶手段14と、ナビゲーションシステムから取得した自車両が走行する道路の道路幅情報と回転半径情報とに基づきUターンが可能か否かを判定するUターン可否判定手段15と、Uターン可否判定手段の判定結果に基づき、自車両の方向転換を支援する方向転換支援手段20、100と、を有することを特徴とする方向転換支援システムを提供する。
(もっと読む)
ナビゲーション装置
【課題】右左折する際における通行可能性に影響を与える要因を考慮して通行不可能と判断した地点を通過しない経路を探索することによって、車両が確実に通行することのできる道路のみを含む経路を案内することができ、ユーザが安心して利用することができ、経路探索の結果に信頼をおくことができるようにする。
【解決手段】道路データ及び交差点データを含む探索データを記憶する記憶部と、記憶部に記憶された探索データを用いて、設定部により設定された目的地までの経路を探索する経路探索部と、通行可能性に影響を与える車両及び道路の要因に基づいて、探索された経路上の右左折地点であって右左折が不可能な地点を検索する右左折不可能地点検索部とを有し、右左折不可能地点検索部により右左折が不可能な地点が検索された場合、地点を通過する場合の探索コストを増加して、設定された目的地までの経路を再度探索する。
(もっと読む)
接触脱輪回避ナビゲーションシステム
【課題】 車両走行軌跡を3次元的に捉え、車両走行軌跡と合致した障害物の回避が正確に行えるような接触脱輪回避ナビゲーションシステムを提供する。
【解決手段】 車両走行軌跡を3次元的に捉えた3次元予想走行軌跡を求め、この3次元予想走行軌跡が障害物と重なる場合に、回避経路を求めるようにしている。このため、実際の車両走行軌跡と合致した障害物の回避を正確に行うことが可能となる。また、障害物が路面に存在する凹部である場合や、高さの低い凸物体であった場合には、全車輪の車輪軌跡がその障害物を通過するか否かを判断するとともに、3次元的に捉えた3次元予想走行軌跡から車両形状が接触するかどうかに応じて回避経路を求めるようにしている。これにより、車両の高さを考慮した回避経路を求めることが可能となる。
(もっと読む)
移動体の情報収集装置
【課題】 移動体に荷物や部品が取り付けられた場合であっても、移動体に関する正確な情報を得ることができる移動体の情報収集装置を提供すること。
【解決手段】 第1の車載手段10が無線タグ6、7、8a乃至8dから車両2の車幅情報、車高情報と、車両2に搭載されたパーツに関する情報を収集し、無線タグ6、7、8a乃至8dから取得して記憶部13に記憶された車幅情報13a、車高情報13bに高さ方向増加分13c、右方向増加部13d、左方向増加分13eを加算してスキーキャリア3、オーバーフェンダー5a、5b等が装着された車両2の実質的な幅および高さを算出し、第2の車載手段20が、第1の車載手段10が収集した無線タグ6、7、8a乃至8dの情報を取得して乗員に通知する。
(もっと読む)
移動体検出装置
【課題】撮像画像上における移動物と静止物とを確実に区別する。
【解決手段】追跡可能領域検出部30は、撮像部10により撮像された画像を複数の領域に区分し、各領域ごとに、移動体を追跡可能な追跡可能領域を検出する。局所領域追跡部50は、撮像間隔Δtの間に、追跡可能領域が画像上を移動する移動量を検出する。距離指標値算出部70は、追跡可能領域に写っている物体までの距離Lを算出し、高さ指標値算出部80は、追跡可能領域に写っている物体の実空間上の高さHを算出する。移動領域検出部90は、距離L、高さH、および、自車移動量検出部60によって検出された所定時間Δtの間の車両の移動距離に基づいて、追跡可能領域がΔtの間に画像上のy方向を移動する距離Δyを算出し、このΔyと、画像上の座標値から求まる追跡可能領域のy方向の移動量Δyとの差に基づいて、追跡可能領域が移動物領域であるか静止物領域であるかを判定する。
(もっと読む)
移動障害物検出装置
【課題】ノイズの影響を受けず且つ高精度に移動障害物の存在を検出することのできる移動障害物検出装置を提供する。
【解決手段】自車両前方の映像を撮像するカメラ1と、カメラ1で撮像された画像上に存在するエッジ部分のオプティカルフローを求めるオプティカルフロー算出手段2と、オプティカルフロー算出手段2で求められたオプティカルフローの交点を求めるオプティカルフロー交点算出手段3と、オプティカルフロー交点算出手段3にて求められた、オプティカルフローの交点の分布をヒストグラム化するヒストグラム作成手段4と、ヒストグラム作成手段4で作成されたヒストグラムに基づき、オプティカルフローの交点のピーク位置が存在する場合に、このピーク位置が同一物体によるものか、或いは異なる物体によるものかをt検定を用いて検定するピーク検定手段5とを備える。
(もっと読む)
障害物測定方法及び障害物測定装置
【課題】先行車両の車幅等の自車前方の障害物の横幅が未知の場合に、前記の外乱等の影響を極力受けないようにして、単眼カメラの撮影画像から、車間距離等の自車から前方の障害物までの距離を精度よく測定する。
【解決手段】自車1に単眼カメラ2を搭載し、このカメラ2の自車前方の撮影画像の画像処理により、その撮影画像上での先行車両等の自車前方の障害物の基準部の高さ方向の位置を観測位置として検出し、この観測位置を入力とする非線形状態空間モデルの適応フィルタのフィルタリングにより、観測位置及び単眼カメラ2の撮影条件に基いて自車1から障害物までの距離を推定して測定する。
(もっと読む)
車両用距離判別装置
【課題】 車両と障害物との距離と目標距離とのずれ量を運転者が視覚により定量的に把握することが容易な車両用の距離判別装置を提供する。
【解決手段】 障害物3に対して所定の投影パターンP1、P2を投影する投影装置21、22が車両1に搭載されている。各投影装置21、22の投影軸A1、A2は、車両1から距離X1離れたC点で交差するように配置されている。そして、距離X1は、投影装置21、22間の距離Y1と略同一に設定されている。このため、障害物3の壁面30に投影された投影パターンP1、P2間の距離Y2は、C点と壁面30との距離X2に略一致する。
(もっと読む)
41 - 55 / 55
[ Back to top ]