
Fターム[5H209HH04]の内容
制御系の安全装置 (4,316) | 対処方法 (533) | 異常、故障発生後の処置 (422) | 制御対象の動作停止 (141)
Fターム[5H209HH04]に分類される特許
81 - 100 / 141
安全管理方法、安全管理システムおよび安全制御機器

【課題】ロボット等の機械の作業空間と人間の作業空間とが重なる危険領域における安全を、生産性を低下させることなく、確保する。
【解決手段】危険領域7へのロボット1の進入または作業者6の進入を、第1,第2のライトカーテン8,9に監視し、ロボット1または作業者6のいずれか一方のみが、危険領域7に進入したときには、それを検知した一方のライトカーテンからの安全入力を無効とし、有効な他方のライトカーテンからの安全入力に基づいて、ロボット1の運転を継続して生産性を維持する一方、ロボット1または作業者6の他方も危険領域7に進入すると、有効な他方のライトカーテンからの安全入力に基づいて、ロボット1の駆動を停止して安全を確保する。
(もっと読む)
電子制御装置

【課題】イグニションスイッチ(IGSW)がオフされると実行されるべき処理(後処理)が完了したならば、外部電源からの電圧供給を遮断する機能を備えた電子制御装置において、後処理の増減を容易にする。
【解決手段】CPU12aは、「後処理の種類の数だけ予めカウンタをアップカウントし、後処理が完了する毎のそのカウンタをダウンカウントする」カウンタ機能21を有しており、IGSW5がオフされている場合に、カウンタのカウント値がアップカウント前の初期値になると、メインリレー3をオフする。つまり、このカウンタ機能21によれば、CPU12aは、メインリレー3をオフするか否かの判断に際し、後処理が完了したか否かを個別に判断しなくても良くなり、このため、後処理が完了したか否かを判断するための構成を、後処理の増減に伴って追加したり削除したりする必要がなくなる。
(もっと読む)
電子制御装置
【課題】タイマ回路の異常をより確実に判定可能な電子制御装置の提供。
【解決手段】イグニッションスイッチ(IGSW)のオンにより電源供給されて動作するマイコンと、常時電源供給されて動作するタイマICとを備えた電子制御装置にて、マイコンは、IGSWのオンにより起動すると、タイマICと内部タイマをリセットスタートさせ、その後、IGSWのオフを検知すると、現在のタイマIC5と内部タイマとの両カウント値の差が規定範囲内か否かを判定し、規定範囲内でなければタイマICが異常と判定する。更に、その判定処理の後、マイコンは、タイマICのカウント動作用クロックの周波数を通常時よりも大きい周波数に設定してタイマICをリセットスタートさせ、その後、内部タイマに基づき一定時間が経過したことを検知した時に、タイマICのカウント値が上限値に達しているか否かを判定し、上限値に達していなければタイマICが異常と判定する。
(もっと読む)
プラント制御システム
【課題】ネットワークを介さずに操作部の制御を行うことが可能となり、操作の伝送遅延を最小限にして障害発生時の対応を迅速化したプラント制御システムを提供する。
【解決手段】このプラント制御システム100は、最小構成のシステムとして構成されている。即ち、プラントの起動、停止、各データの管理及び計算を司るユニット計算機1と、社内LAN等のネットワーク7と、ネットワーク7に接続されたCRT6と、を備えて構成されている。そして、ユニット計算機1は、プラントの起動、停止、各データの管理及び計算を司るユニット制御部5aと、CRT6の制御を行なうCRTコントローラ5と、プラントに配備された各計器類12との間で入出力データの制御を行なうPIOユニット2と、管理データの集計を行って記録紙に印刷するプリンタ3と、CRT6の表示画面を画像として紙に印刷するハードコピー4と、を有する。
(もっと読む)
ガス遮断装置
【課題】強制遮断機能を使用したいたずらを防止する。
【解決手段】再入力判定部13が、強制遮断入力手段5からの強制遮断信号を受け取り、第1のカウンタが所定時間を経過したのち作動を開始する第2のカウンタの計時動作中に再度、強制遮断入力手段5からの強制遮断信号を受け取ったとき強制閉栓信号を出力するようにした。
(もっと読む)
デッドマンスイッチを備えたティーチペンダント
【課題】作業者の疲労を軽減するデッドマンスイッチを備えたティーチペンダントを提供する。
【解決手段】非操作時はOFF、通常操作時はON、完全操作時はOFFを出力するデッドマンスイッチを備えたティーチペンダントにおいて、操作部材14はティーチペンダント1に設けた開口部2に取り付けられ、作業者が握持する握持部11と、この握持部に隣接して設けられて握持部を握持したときに指40を挿入するための指挿入部12とを有している。第1スイッチ21は指挿入部に指が挿入されたときに通常操作が行われたものとしてON信号を出力する。第2スイッチ22は握持部が強く握持されたときに完全操作が行われたものとしてOFF信号を出力する。教示作業時等、指挿入部に指を挿入するだけで従来の第2ポジションが実現でき、容易にサーボ電源をONに維持し続けることができるので作業者の疲労を軽減できる。
(もっと読む)
電子・機構複合装置
【課題】 機械的機構部の動作を電子回路および制御プログラムにより制御して目的の機能を実現する電子・機構複合装置に関し、制御プログラムの不当動作防止技術に関する。
【解決手段】 電子・機構複合装置において、コマンドレジスタの値とセンスレジスタの値の組み合わせの内、禁止されるパターンを保持する禁止パターンメモリ部と、コマンドレジスタおよびセンスレジスタの値のパターンと、禁止パターンメモリ部に保持されたパターンとを比較し、一致するパターンが存在するとき禁止操作検出信号を出力するパターン比較部と、パターン比較部が禁止操作検出信号を示すとき、駆動回路を不活性化する駆動禁止手段とを設ける。
(もっと読む)
自動運転装置の安全装置及び自動運転装置の制御方法
【課題】自動運転装置の可動部の動作範囲内に作業者や他の自動運転装置が立ち入って作業を行うような場合でも、可動部と作業者等との衝突を防止し、安全に可動部を動作させることが可能な自動運転装置の安全装置及び自動運転装置の制御方法を提供する。
【解決手段】自動運転装置の安全装置(10)は、所定の経路に沿って移動する可動部の動作を制御する制御部(21)と、可動部及び所定の経路上に設定された監視領域を撮影した画像を取得する撮像部(11)とを有する。制御部(21)は、画像に基づいて可動部の位置を検出する位置検出手段(31)及び監視領域内に侵入物が存在するか否かを判定する判定手段(32)と、可動部の位置から監視領域までの移動距離を算出する移動距離算出手段(33)と、監視領域内に侵入物が存在すると判定された場合に、移動距離が所定距離以下の場合、可動部を停止または減速させる衝突回避手段(34)とを有する。
(もっと読む)
駆動制御装置、ロボットコントローラおよび自律移動装置
【課題】異常検知の信頼性と安全性を高めた駆動制御装置を提供することを目的とする。
【解決手段】本発明は、電力制御部と、駆動制御CPUと、を備える駆動制御装置であって、駆動制御CPUは、駆動制御CPUの内部クロック信号を第1所定期間に検出しないときに、エラー処理を行う第1異常監視部を備え、駆動制御CPUに接続され、信号を、第1所定期間に検出しないとき、および、ソフトウェアの処理もれによる信号または電気的なノイズによる信号を検出したときにエラー処理を行う第2異常監視部が駆動制御CPUの外部にさらに設けられおり、駆動制御CPUは、第2異常監視部が、ソフトウェアの処理もれによる信号または電気的なノイズによる信号を検出したときには、エラー処理として、駆動部への制御出力を省略することを特徴とする。
(もっと読む)
駆動制御装置、ロボットコントローラおよび自律移動装置
【課題】異常検知の信頼性と安全性を高めた駆動制御装置を提供する。
【解決手段】駆動部であるモータ31、32に供給する電力を制御する電力制御部214と、動作指示が入力され、動作指示に応じて電力制御部214に制御信号を出力する駆動制御CPU212と、を備える駆動制御装置であって、駆動制御CPU212は、駆動制御CPU212の内部クロック信号を第1所定期間に検出しないときにエラー処理を行う第1異常監視部218を備え、駆動制御CPU212に接続され、信号を第1所定期間に検出しないときにエラー処理を行う第2異常監視部213が駆動制御CPU212の外部にさらに設けられている。
(もっと読む)
ガス遮断装置
【課題】電池電源部の使用容量が一定値を越えた際に電池消耗判定条件を変更して確認することで、電源容量消耗時の安全性を確保することを目的とする。
【解決手段】電池使用時間判定部12が電池電源部9の供給開始からの使用時間を電池使用時間計測部12で計時し、その値が電池使用期限設定部11の使用期限を越えると計時信号を出力する。この信号を受け電池低下判定部13は擬似電流を計時信号入力後は計時信号入力前より多く設定し電池消耗判定を行なう。
(もっと読む)
端子台装置
【課題】省配線化を図ると共に、産業用ロボットの駆動停止までの時間を短縮化する。
【解決手段】多光軸光電センサ13の安全信号入力に応じて産業用ロボット11を駆動制御するPLC回路15と端子接続すると共に、安全信号入力に応じて、産業用ロボットへの電力供給を遮断するセイフティリレー回路24を駆動制御する安全回路14と端子接続すべく、入力端子21A及び出力端子21Bを備えたセイフティターミナル16であって、入力端子及び出力端子を通じてPLC回路とのインタフェースを司り、入力端子を通じて安全信号を入力する制御回路用インタフェース23と、入力端子及び出力端子を通じて安全回路とのインタフェースを司り、入力端子を通じて安全信号を入力する安全回路用インタフェース22とを有し、制御回路用インタフェースは、入力端子を通じて安全信号を入力すると、出力端子を通じて同安全信号をPLC回路に通知するようにした。
(もっと読む)
モータ制御装置
【課題】ギャップ制御における異常を短時間で検知し、機器の破損を防止するモータ制御装置を提供する。
【解決手段】モータ2の位置を検出するエンコーダ3を用いて、位置指令とエンコーダ3の位置情報を比較することでモータ2の位置制御を行う位置制御器11と、モータ2で駆動されるワーク4と対象物の距離を測定するギャップセンサ5を用いて、ギャップ指令とギャップセンサ5からのフィードバック情報を比較することで、ワーク4と対象物間のギャップを一定に制御するギャップ制御器12と、ギャップセンサ12の有効範囲外では位置制御器11、有効範囲内ではギャップ制御器12に切り替えるモード切替器13と、モード切替器13とエンコーダ3とギャップセンサ5の情報から、モータ2を停止させる機能を備えた保護装置16とを備え、これらを同一の演算周期で動作させる。
(もっと読む)
操縦桿非作動化
本発明は、作業者が始動した制御信号を車両制御器に伝達するための肘掛け搭載操縦桿に関する。複数のスイッチが、制御信号を車両制御器に届けるためには、作業者が操作位置に安全に位置することを必要とする。全てのスイッチが実質的に同時に状態を変更するときのみ、それに応答して操縦桿が作動化または非作動化する。 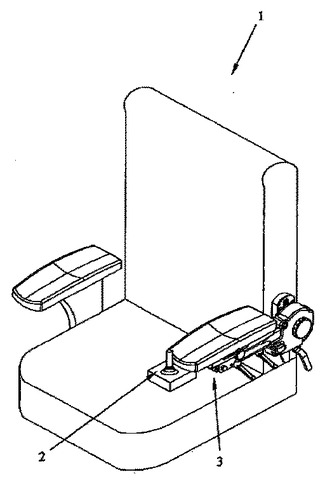 (もっと読む)
(もっと読む)
ガス遮断装置
【課題】電池電源部の電源容量消耗時の安全性を確保するガス遮断装置を供給することを目的とする。
【解決手段】擬似負荷11が動作し電池電源部9に遮断弁16動作時と等価な電流を供給させ、波形安定時間計時部12が電池電源部9の過渡電圧変化する時間の後、電池最低電圧判定部13が電池電圧を一定時間毎に入力し電圧変化がゼロあるいは正方向がn回連続した時に電圧低下検出判定を行うため電池の内部抵抗が一定時間増加後に減少する場合でも遮断弁16を動作できない問題を減じることが出来る。
(もっと読む)
安全計装システム
【課題】エンジニアリングの負担を抑制しつつ、安全計装システムの側の機器を、プラント制御システムを介して操作可能な安全計装システムを提供する。
【解決手段】指示変換手段11は、受付手段71で受け付けられた操作の指示のデータ形式を、プラント制御システム20のデータ形式から安全計装システム10のデータ形式に変換する。操作実行手段12は、指示変換手段11により得られた当該操作の指示および安全計装システム10本来の指示を受けてそれらの操作を実行するとともに、両者の指示が競合する場合には、当該安全計装システム10本来の指示を優先して操作を実行する。
(もっと読む)
サーボモータ監視装置
【課題】サーボモータの動作について適正に異常検知を行う。
【解決手段】 サーボモータ1に接続されたモータ駆動線U,V,Wからサーボモータの磁極位置信号を取り出す磁極位置算定手段20と、サーボモータの位置検出手段からの現在位置信号を入力する現在位置信号入力手段30と、サーボモータの磁極位置信号と現在位置信号の二系統の信号に基づくサーボモータの動作を比較し、不一致が検出された場合に、サーボモータへの電源供給を遮断する停止指令信号を出力する監視手段40とを有している。
(もっと読む)
危険な状態を検知する方法及び装置
所定のエリアに影響を与える物質間の判別を、少なくとも部分的にはその所定のエリアに影響を与える物質の測定可能な特徴を示すデータ内の差分に基づいて、行うように動作可能とされている装置である。このような装置は、少なくとも部分的にはこのような差分の確認に基づいて、保護機構を始動させることができる。 (もっと読む)
設備データ解析処理システムとその方法
【課題】送信した操作信号に応じた正しい画面が表示されているか否かを確認可能とし、不正な画面表示や不正な画面操作を速やかに中止可能とすることにより、既存の監視制御システムで表示される画面から設備データを容易かつ確実に収集可能とする。
【解決手段】画面識別データファイル201には、キーボード/マウス信号生成プログラム132による操作信号の送信結果として監視制御システム110のモニタ装置114に表示される画面の特徴を示す画面識別データ210が、異なる種別の画面毎に予め保存される。画像判定プログラム201は、画面識別データ210に基づき、操作信号の送信結果としてモニタ装置114に実際に画面表示される判定対象画面の画像データが、当該操作信号の基準画像データと一致するか否かを判定する。不一致である場合には、キーボード/マウス信号生成プログラム132による操作信号の生成および送信を中止する。
(もっと読む)
モータ制御装置
【課題】基準信号が異常状態になっても、移動体を直ちに停止させないで目標の位置まで滑らかに、かつ安全に動作させることができるモータ制御装置を提供する。
【解決手段】ライン基準位置指令器44は、基準信号に基づく経過時間に対する位置の指令信号であるライン基準位置指令を設定し、異常検出器82は、ライン基準位置指令またはライン基準速度指令が異常であるとき、異常信号を出力する。擬似ライン基準位置指令発生器49は、異常発生前のライン基準位置指令に基づいて推測した擬似ライン基準位置指令を出力する。第1の切替器50は、異常が無い場合にライン基準指令信号を出力し、異常が有る場合に疑似ライン基準位置指令を出力する。
(もっと読む)
81 - 100 / 141
[ Back to top ]