
Fターム[5H209HH04]の内容
制御系の安全装置 (4,316) | 対処方法 (533) | 異常、故障発生後の処置 (422) | 制御対象の動作停止 (141)
Fターム[5H209HH04]に分類される特許
41 - 60 / 141
安全関連制御ユニットおよび自動化設備の制御方法
【課題】安全関連制御ユニットの外部で発生した故障に対する適用性を高めると同時にコストを低減する。
【解決手段】複数のセンサ(16)および複数のアクチュエータ(14)を備え、前記アクチュエータ(14)を制御するための複数の制御命令(44, 46, 48)を含み、複数の第1プログラム変数を処理することにより前記制御命令の少なくとも一部(44)を実行するように設計されている第1プロセッサ(20)を備える。第一プロセッサ(20)は第1の規定タイミングに少なくとも1つの前記第1プログラム変数(FSV1A)に対して存在する瞬時値(FSV1A(n))に応じて前記第1プログラム変数(FSV1A)の第1試験値(CRCFSV1A(n))を決定するように設計されている。さらに前記第1試験値(CRCFSV1A(n))に対応する第2試験値(CRCFSV1B(n))を決定するように設計されている前記第2プロセッサ(22)と、前記瞬時値(FSV1A(n))、前記第1試験値(CRCFSV1A(n)、および前記第2試験値(CRCFSV1B(n))を記憶するように設計されているデータメモリ(92)とを備える。
(もっと読む)
ビルトインテスト回路を内蔵したジンバル制御システム

【課題】本発明は、ジンバル制御システムにビルトインテスト回路を設け、このビルトインテスト回路によって励磁信号の有無を検出し、異常時のジンバルの損傷を防止することを目的とする。
【解決手段】本発明によるビルトインテスト回路を内蔵したジンバル制御システムは、ジンバル制御システム(2)にビルトインテスト回路(18)が内蔵され、このビルトインテスト回路(18)により、レゾルバリファレンス出力回路(13)からの励磁信号(14)の有無を検出し、この励磁信号(14)が停止した状態で三相ブラシレスモータ(7)への駆動信号(6)を停止し、ジンバルのストッパへの可動子の衝突を防止し、ジンバルの損傷防止を行う構成である。
(もっと読む)
電子制御装置
【課題】簡単な構成で、タイマ部の異常を迅速且つ正確に判定可能な電子制御装置を提供する。
【解決手段】予め設定された開始タイミングで制御部5からタイマ部4に初期化信号を出力してタイマ部4にタイマ部計測時間を初期化させる。そして、制御部5でタイマ部4とは別に開始タイミングから予め設定された終了タイミングまでの所定期間の時間を計測させ、その計測した制御部計測時間CMCtimeと、終了タイミングにおけるタイマ部4のタイマ部計測時間TICtimeに基づいてタイマ部4の異常を判定する。
(もっと読む)
ジンバル駆動制御装置
【課題】従来のジンバル駆動制御装置は、WDTにより駆動制御手段30の異常を検出した際にジンバルを停止させるように構成しているので、ジンバルを停止させるまでの間に遅れが生じることがあり、ジンバルが異常回転される可能性がある。
【解決手段】本発明によるジンバル駆動制御装置は、ジャイロ51からの信号とレゾルバ53からの信号とに基づいてジンバルの駆動速度50a,50bを検出し、駆動速度50a,50bが規定速度を超えた際にジンバルを停止させる構成である。
(もっと読む)
非常停止回路装置
【課題】非常停止回路装置において、簡単な構成により、非常停止回路に対して非常停止スイッチ部の着脱を容易とすると共に、低コスト化を図る。
【解決手段】本装置1は、ボタンが押されることにより自己の内部回路を開路する複数の非常停止スイッチ部2と、スイッチ部2が互いに直列接続され、前記いずれかのスイッチ部2が開路されることにより、負荷5が接続された電気回路10を非常停止として遮断する非常停止回路3と、を備える。非常停止スイッチ部2は非常停止回路3に対して着脱自在であり、いずれかの非常停止スイッチ部2が取り外された状態においては非常停止回路3におけるスイッチ部2を取り外した回路部分を短絡させ、該スイッチ部2が装着された状態においては短絡を開放する短絡開放切替手段4を備え、短絡開放切替手段4は、各非常停止スイッチ部2毎に設けられ、スイッチ部2の着脱に伴う物理的な動作によって短絡と開放を切り替える。
(もっと読む)
車両監査装置
【課題】挙動監査の対象である制御対象に応じて変更される監査処理の変更量を極力低減する車両監査装置を提供する。
【解決手段】車両監査装置50の関連監査処理手段60は、制御対象の構成や機能に関連する関連監査処理を実施し、独立監査処理手段100は、制御対象の構成や機能に関連せず独立した独立監査処理を実施する。関連監査処理手段60の挙動推定手段62は、物理モデル64と、制御対象に応じて物理モデル64を特徴付ける車両に固有のパラメータ66とに基づいて制御対象の挙動を推定し、挙動推定値を算出する。挙動検出手段70はセンサ信号に基づいて制御対象の挙動を挙動検出値72として検出する。次元一致手段74は、挙動推定値と挙動検出値との物理量の次元を一致させる。独立監査処理手段100の挙動判定手段102は、次元が一致した挙動推定値と挙動検出値との挙動ずれ量に基づいて、制御対象の挙動が異常であるか否かを判定する。
(もっと読む)
サーボシステムおよび安全制御機器
【課題】サーボシステム全体を、安全機能を有するサーボシステムに入れ替えることなく、サーボシステムの安全化を図る。
【解決手段】サーボモータ2と、サーボモータ2に取り付けられたエンコーダ3の出力に基づいて、サーボモータ2の駆動を制御するサーボアンプ4とを備えるサーボシステムにおいて、エンコーダ3の出力に基づいて、異常の有無を監視し、異常が有るときには、サーボモータ2への駆動電力の供給を遮断する安全制御機器6を設けており、監視する内容を設定情報として設定できるようにしている。
(もっと読む)
自動設備を制御するための安全制御装置および方法
【課題】診断レポートの提供時にプロセス状態自体およびこのプロセス状態と関連するシステム状態を同時に報告する。
【解決手段】複数のセンサーからの複数の制御入力信号が供給される制御部276と、複数のプロセス診断入力信号が供給され、制御対象の設備の複数のプロセス状態のいずれが第1の規定時間に現れるかの判定の基準として前記複数のプロセス診断入力信号を解釈するように構成されたプロセス診断評価部318と、複数のシステム診断入力信号が供給され、前記安全制御装置の複数のシステム状態のいずれが第2の規定時間に現れるかの判定の基準として前記複数のシステム診断入力信号を解釈するように構成されたシステム診断評価部324と、複数の判定プロセス状態および前記複数の判定システム状態に対して複数の診断レポートを提供するように構成され、少なくとも1つの判定プロセス状態に対して、当該プロセス状態および当該複数の判定システム状態のうちの当該プロセス状態と関連する複数の関連システム状態に基づいて診断レポートが提供される診断レポート部940とを備える。
(もっと読む)
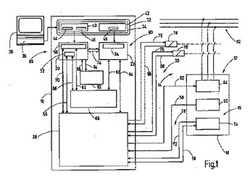
自動化設備を制御するための安全コントローラおよびその制御方法
【課題】制御される設備の確認されたプロセス状態または安全コントローラのシステム状態を表す情報の伝達をよりフレキシブルに、それによって外部の状況に合わせて表示する情報を調整できるようにする。
【解決手段】安全コントローラ12と対話する人、具体的には前記ディスプレイユニット72を読み取る人に関連するアクセス認証を検出するように設計されており、前記検出されたアクセス認証を表すアクセス認証信号84を提供する前記検出ユニット82用のインターフェース80と、前記作動状態信号68ならびに前記特殊作動モード信号78および/または前記アクセス認証信号84が供給され、前記確認された作動状態を表す診断レポートを判断するために、前記確認された作動状態ならびに前記選択された特殊作動モードおよび/または前記検出されたアクセス認証に基づいて、前記診断レポートを表すとともに、前記診断レポートを表示するために前記ディスプレイユニット72に供給される診断信号88を生成する診断選択ユニット86と、を有する安全コントローラ。
(もっと読む)
安全ステップの判定方法および安全マネージャ
サブスクライバを含むオートメーションネットワークにおける安全ステップを判定するために、オートメーションネットワークにおけるサブスクライバ間のデータおよび処理に固有のリンクは、自動的に判定される。オートメーションネットワークにおける安全ステップは、その後、オートメーションネットワークにおけるサブスクライバの判定されたデータおよび処理に固有のリンクと、判定されたサブスクライバに固有の安全パラメータとを関連付けるアルゴリズムを用いて評価される。 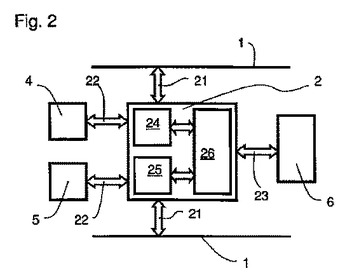 (もっと読む)
(もっと読む)
工作機械の無線式送受信装置
【課題】機械停止の発生が抑制でき、非常停止時には高い信頼性でもって停止させることのできる、安全性に優れた工作機械の無線式送受信装置を提供する。
【解決手段】NC旋盤等の工作機械1に接続される送受信機5と間で電波通信と赤外線通信とによりデータの送受信が可能な操作端末4を備える。通常は、電波通信によって操作制御データ53aと安全制御データ53bとを送受信し、赤外線通信によって安全制御データ53bのみを送受信する。電波通信ができなくなった場合には、赤外線通信で安全制御データ53bに加えて操作制御データ53aを送受信するとともに、警報を行う。操作端末4は、装備した非常停止ボタン12等の入力装置の異常を検出する異常検出部34や、通信処理部32の動作を独立して監視する監視処理部33を備える。
(もっと読む)
電子機器、異常状態通知システム、異常状態通知方法及び異常状態通知プログラム
【課題】 電子機器において異常状態が発生した際に、その異常状態を管理者等に通知すると共に異常状態を対応又は解消するなどの制御ができないという問題点があった。
【解決手段】 本発明の電子機器では、機器に異常が発生した際には電話回線を経由してあらかじめ設定してある電話番号に電話をかけて、機器の異常を通知する異常状態通知部を設けた。又、機器の通知時に電話回線からのDTMF信号の送信により、異常状態の対応又は解消の処理命令を受信して、該処理命令に応じて電子機器の電源遮断や、システムの休止、システムのリセット等の制御を可能とする異常状態処理部を設けて課題を解決した。
(もっと読む)
安全PLC
【課題】制御対象の運転に対する安全性をより高くすること。
【解決手段】シーケンス制御を行うPLC本体1からの制御に応答して制御対象を操作するもので電源の供給を受けて作動するモジュール3を備え、このモジュール3に、電源の状態を検出する検出部3eと、この検出部3eで電源が異常なことを検出されたときには、PLC本体1によるシーケンス制御とは自立して自身による操作により制御対象を安全側に操作すると共に、その操作状態をPLC本体に連絡する制御部3aとを設けた。
(もっと読む)
制御システム
【課題】上位制御装置の処理負荷を軽減するとともに上位制御装置と下位制御装置の間の通信量の軽減を図ることが可能な制御システムを提供すること。
【解決手段】上位制御装置及びユニット制御装置により構成された制御システムであって、上位制御装置は、被制御機器の動作開始命令及びセンサ信号の変化に基づき被制御機器の動作を停止させる動作停止命令を含む動作制御情報をユニット制御装置に対して送信する第1の制御手段を備え、ユニット制御装置は、センサからのセンサ信号を検出する検出手段と、動作制御情報に含まれた動作開始命令に基づき被制御機器に対して動作の開始を指示し、動作制御情報に含まれた動作停止命令に基づき検出手段によるセンサ信号の変化検出により被制御機器に対して動作の停止を指示する第2の制御手段とを備える。
(もっと読む)
整圧器システム
【課題】既存の整圧器に対しても容易に設置することができ、また地震時において確実にガスの供給を停止できる整圧器システムを提供する。
【解決手段】主整圧器3とパイロット整圧弁13とを有し、主整圧器3内のガス圧力を抜くことにより作動させるアンローディング型整圧器において、主整圧器3とパイロット整圧弁13を繋ぐ第2パイロット経路11に設けられた操作弁15と、地震を感知したときに感知信号を発信する地震感知器19と、地震感知器19の発信する感知信号を入力し、該感知信号が予め設定された値を超えていると判断されたときに操作弁15を閉止する制御装置17とを備えたことを特徴とする整圧器システム。
(もっと読む)
演算処理ユニットの異常監視装置
【課題】演算処理ユニットの特定の演算部をピンポイント的に、しかも外部に回路を追加することなく確実に異常判定し得るようにした異常監視装置を提案する。
【解決手段】コントローラ38内の特定演算部38aは、目標クラッチ容量tTc2を実現するソレノイド駆動デューティーDc2を演算により求め、これを、クラッチ圧制御ユニット39内のソレノイドに向かわせてクラッチの締結容量制御を行う。演算部38aの異常監視用にコントローラ38内に設定した演算部38bは、tTc2を実現するソレノイド駆動デューティーDc2'をマップ検索する。コントローラ38内の演算結果比較部38cは、偏差ΔDc2=|Dc2−Dc2'|が微少設定値未満であるとき、Dc2がDc2'に一致して正常であるとする演算結果一致信号Eをコントローラ11へ出力し、それ以外では、Dc2がDc2'と異なって異常であるから信号Eをコントローラ11に出力しない。
(もっと読む)
コントローラ装置
【課題】 コントローラ装置の内部温度を取得するための温度検出素子に異常を来たした場合は内部温度を正常に取得できないので、安全のため、装置の運転を停止しなければならず不便である。
【解決手段】 複数の温度検出素子を備えたうえで、いずれかの温度検出素子が異常を来たした場合であってもそれを温度検出素子異常判断部によって検知し、正常な温度検出素子の出力に基づいてコントローラ装置の内部温度を測定することが可能となるので、従来のコントローラ装置に比して安全かつ利便性の高いコントローラ装置を提供することが可能となる。
(もっと読む)
二重化プログラマブルコントローラ
【課題】通信ケーブル接続が不安定な条件下でも、系切替処理の多発を抑止することができる二重化プログラマブルコントローラを得る。
【解決手段】それぞれCPUユニット21と通信ユニット22を有する二重化プログラマブルコントローラが、バックアップのモードで動作している時に、制御系2aの通信ケーブルが断線した場合、制御系2aのCPUユニット21aの通信プログラム23aは、制御系のプログラムブルコントローラを故障状態に移行することにより、二重化機能により制御系と待機系を切替え、待機系2bを新制御系にして、待機系2bの通信プログラム23bにより通信を継続するようにした。
(もっと読む)
制御システム及び制御方法
【課題】遠隔操作型、または自律動作型のロボット等の動作を制御するための制御システムであって、ロボット等及び制御システムの異常を確実に検出することができ、異常が生じた場合には、ロボット等が高速で動作しているときであっても慣性によって動作し続けることを防止して周囲に危険が及ぶことを防止し、また、ロボット等の重量及び容積を増大させることがなくロボット等の動作性能を劣化させることがない制御システムを提供する。
【解決手段】電源制御を行い一定周期でアライブメッセージを送信する電源制御コンピュータ1と、サーボドライバ5への速度指令を出力し一定周期でアライブメッセージを送信する駆動制御コンピュータ2と、これらコンピュータ1,2を接続する通信回線3とを備え、各コンピュータ1,2のいずれかがアライブメッセージを受信しなくなった場合には、サーボドライバ5へ停止指令を出力し、その後、駆動系への電源供給を遮断する。
(もっと読む)
安全確保装置
【課題】冗長化された複数の設定部を有する安全確保装置における設定作業の効率化を図る。
【解決手段】動作モードと設定モードとを切り替えるモード切替部26によって、設定モードを選択し、設定部の組の内の特定の設定部としての第1の設定部23−1に対して設定を行うことにより、その設定内容、第1,第2の逆起電力入力部11,12および接点入力部13の入力に基づいて、安全信号と同様の補助信号を出力するようにしており、これによって、冗長化されている二つの第1,第2の設定部23−1,23−2に対して同じ設定を行うことなく、第1の設定部23−1のみの設定を行なえばよく、また、補助信号を用いて、設定内容が適切であるか否かを確認して設定を調整することができる
(もっと読む)
41 - 60 / 141
[ Back to top ]