
Fターム[5H209HH04]の内容
制御系の安全装置 (4,316) | 対処方法 (533) | 異常、故障発生後の処置 (422) | 制御対象の動作停止 (141)
Fターム[5H209HH04]に分類される特許
21 - 40 / 141
サーボシステム、サーボモータ駆動装置、セーフティユニットおよびサーボシステムの制御方法
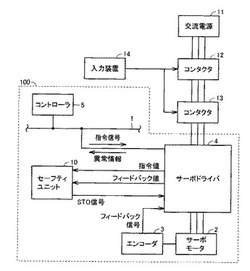
【課題】サーボシステムに用いられるエンコーダを、安全機能を有するものに入れ替えることなく、サーボシステムの安全化を図る。
【解決手段】サーボドライバ4は、コントローラ5からの指令信号に基づいて、サーボモータ2の動作に関する指令値を設定する。サーボドライバ4は、その指令値およびフィードバック信号から得られたフィードバック値をセーフティユニット10に送信する。サーボドライバ4から送られた指令値およびフィードバック値の少なくとも一方の値が異常である場合に、STO信号を発生させるとともに、そのSTO信号をサーボドライバ4に送信する。サーボドライバ4にSTO信号が入力された場合、サーボドライバ4はサーボモータ2への電力の供給を停止する。従来から使用されていたエンコーダを用いて安全規格に適合したサーボシステムを構築することが可能となる。
(もっと読む)
バルブ制御システムおよびバルブ制御方法

【課題】設計、維持等を容易としつつ安全規格に対応可能なバルブ制御システム、およびその制御方法を提供する。
【解決手段】バルブ制御システム50は、流体を流すための配管1に設けられた汎用バルブ11,12と、センサ13,14と、安全コントローラ20とを備える。汎用バルブ11,12は電気信号によって開閉可能なバルブであり、たとえばソレノイドバルブである。センサ13,14は、対応するバルブからの流体の流出状況を検出するセンサであり、たとえば圧力スイッチにより構成される。安全コントローラ20は、安全規格を満たすように構成されるとともに、センサ13からの信号in1およびセンサからの信号in2にに基づいて、バルブ11,12を制御するための信号out1,out2を出力する。
(もっと読む)
電流監視安全システム、その動作方法、及び携帯機器
【課題】システムに流れる多様な電流変化に応じた異常検出と誤動作防止の両方を実現した安全システムを構築することができ、小型化・薄型化・高機能化が要求される携帯機器における安全設計を容易にすることができる電流監視安全システムを提供する。
【解決手段】電流監視安全システムは、電流監視対象のシステムとその電源との間に接続され、システムとの間で通信可能である。この電流監視安全システムは、システムの動作状況に合わせて異常と判断する基準電流を切り替えて指示する動作電流管理部と、システム及び電源間を流れる電流を測定し、その測定電流と動作電流管理部により指示された基準電流との比較によりシステム異常を判断する電流監視部と、電流監視部によりシステム異常と判断されたときにシステム及び電源間の電気的接続を遮断する遮断制御部とを有する。
(もっと読む)
システム設定可能な安全制御装置を有する安全装置
【課題】添付書類を見なければ、ロータリースイッチの位置と制御プログラムとの関係を直接的に確認できない。
【解決手段】システム設定が可能な安全制御装置10が、センサを接続するための少なくとも1つの入力部18、アクチュエータに接続するための少なくとも1つの出力部22及び1つの制御ユニットを有し、該制御ユニットが、論理規則に基づき入力部18における入力信号に応じて出力部22への制御信号を生成する制御プログラムを実行し、その際、論理規則がシステム設定装置によって設定される。この場合、システム設定装置の中で論理規則を表現する数値コードが作成可能であり、安全制御装置10が数値コード入力用のインターフェース30を有し、かつ制御ユニットが、数値コードにより表現される論理規則で制御プログラムを実行するように構成されている。
(もっと読む)
動作制御装置
【課題】未使用の期間(たとえば電源に接続されていない期間)が長くても装置の耐用期間に応じて動作を停止させる機能を備えた動作制御装置を提供する。
【解決手段】標準時刻信号等の時報信号を受信して自己が計時する現在日を校正する時計部と、製造年月日等の起算日を記憶する記憶部と、現在日が起算日から所定の耐用期間を経過している場合、または、時計部が時報信号で校正されていない場合、本体装置の動作を禁止する制御部と、を備える。
(もっと読む)
安全制御盤及び安全制御システム
【課題】機械が有する制御盤に簡単に着脱可能な安全制御盤を提供する。
【解決手段】安全制御盤30は、制御盤20から電源を受電する配線が接続される端子台35、及び安全PLC31にて構成される。端子台35は、安全PLC31に配線接続され、安全PLC31に電源を供給する。安全PLC31は、入力部32、制御部33、及び出力部34を備える。入力部32は、安全機器が接続される端子台36〜41、及び機械2が有するPLC22と通信線で接続される端子台56と、を備える。制御部33は、入力部32から入力される信号に基づいて演算し、演算結果を出力部34に出力することで、電源の供給を制御する。出力部34は、端子台43〜45を備え、制御部33の演算結果により制御された電源を出力する。端子台43は運転許容状態のときに電源を供給し、端子台44は機械作業領域14に動力供給し、端子台45は危険領域15に動力供給する。
(もっと読む)
制御システム
【課題】より簡易な構成によって安全規格に適合可能な制御システムを提供する。
【解決手段】負荷駆動システム100は、入力機器としてのドアスイッチ11と、電力供給部12と、PLC13とを備える。電力供給部12は、ドアスイッチ11からの信号に基づいて、モータ2への交流電力の供給およびモータ2への交流電力の供給を遮断するように構成される。PLC13は、ドアスイッチ11および電力供給部12(コンタクタ21)を監視するとともに、その監視結果をコンタクタ22に出力する。PLC13は、機器を監視する機能およびその監視結果を出力する機能を有するものの、安全関連の制御を実行する機能を有していない。ドアスイッチ11およびコンタクタ21のいずれか一方が異常であることがPLC13によって検出された場合、コンタクタ22は、そのPLC13の監視結果によってオフされる。
(もっと読む)
電子制御装置
【課題】負荷の駆動を制御すると共に、その制御が正常に行われない異常状態であるか否かを判定して、異常状態と判定した場合には負荷を強制的に所定の待避状態にさせるよう構成された電子制御装置において、異常状態との判定によって負荷を待避状態にさせた後は、その待避状態を確実に保持できるようにすることを目的とする。
【解決手段】第1判定回路10及び第2判定回路20のいずれも、マイコン2からの判定用データが不合格データならばそれぞれ閉塞信号をHレベルにセットする。これによりモータドライバ3への第3閉塞信号はHレベルにセットされ、モータ5は強制的に停止される。その後、マイコン2の異常によって意図しないリセットコマンドが受信されると、第1閉塞信号はLレベルにクリアされてしまうが、第2閉塞信号はHレベルのまま保持され、よって第3閉塞信号もHレベルのまま保持される。
(もっと読む)
移動体駆動制御システムの異常監視装置
【課題】コンピュータ(CPU)で制御するサーボ系において、コンピュータの異常検出遅れ時間の短縮、異常検出からサーボモータの減速停止動作開始までの空走時間の短縮及び異常停止時のショック軽減を実現できるようにする。
【解決手段】移動体駆動制御システムは、サーボモータ11を駆動するサーボアンプ12と、該サーボアンプ12に速度指令を出力するサーボ指令部13と、サーボ指令部13を制御するCPU(コンピュータ)14とから構成されている。サーボ指令部13内には、CPU14の動作が異常になっていないか否かを監視する異常監視手段22と、この異常監視手段22によりCPU14の異常が検出されたときに所定の減速停止プロファイルに従ってサーボモータ11を減速して停止させるようにサーボアンプ12に出力する速度指令を変化させる異常時減速停止手段23としての機能が組み込まれている。
(もっと読む)
運動変数のフェールセーフモニタリングのための安全回路およびモニタリング方法
【課題】可動機械部品の運動変数、特に回転速度のフェールセーフモニタリングのための安全回路(10)を提供する。
【解決手段】モニタリングするべき運動変数を表すエンコーダ信号(A)を供給する信号入力(16)と、基準電圧(UrefA)を供給する基準電圧路(20)と、エンコーダ信号(A)に基準電圧(UrefA)を重ね合わせることによって重畳信号を提供するために、信号入力(16)および基準電圧路(20)に接続されているタップ(M)と、タップ(M)に接続されて、重畳信号が少なくとも1つの所定の信号レベルに達するかどうかまたは所定の信号レベル範囲内にあるかどうかを検出するように設計されている測定ユニット(22)とを備える。
(もっと読む)
安全装置および電力変換器
【課題】基本的な制御機能と安全機能とを分離した構成を有する安全装置において、所望の規格の安全機能を担う安全機能部が正しく実装されていることを正確に判定すること。
【解決手段】安全装置を制御部と安全機能部で構成し、制御部には、接続されるべき安全機能部を識別するための種別を選択する手段と、基準信号を安全機能部へ送信する手段と、安全機能部から返信されてきた種別を特定するための信号である種別識別信号をもとに、接続されている安全機能部の種別が選択した種別と一致するか否かを判定し、該判定の結果を出力する手段と、判定の結果、接続されている安全機能部の種別と選択した種別とが一致しなかった場合は、制御信号の出力を禁止する手段とを設け、安全機能部には、制御部から送信されてきた基準信号をもとに該安全機能部の種別に応じた処理によって種別識別信号を生成して制御部へ返信する手段を設ける。
(もっと読む)
電気作動装置にパワー供給する供給ユニット及び方法
本発明は、電気作動装置12の専用コネクタ手段30、32と解除可能に接触するコネクタ素子22、24、26、28によって、電気作動装置に電気パワー及び/又は電気信号を供給する供給ユニット10に関する。本発明によれば、供給ユニット10は、パラメータを測定する測定装置34を有し、パラメータは、前記パラメータから、供給ユニット10のコネクタ素子22、24、26、28のうち1つのコネクタ素子22と他のコネクタ素子24との間に電気的に相互接続される外部容量の存在を判定するのに適している。本発明は更に、対応する電気作動装置12、供給ユニット10及び電気作動装置12を有する電気システム20、並びに電気作動装置12に電気パワー及び/又は電気信号を供給する方法に関する。 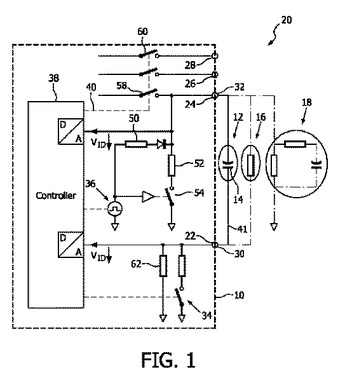 (もっと読む)
(もっと読む)
モジュール間信号伝達方式
【課題】例えば安全機器の起動に関わる情報をモジュール間で確実に伝達することのできるモジュール間信号伝達方式を提供する。
【解決手段】情報の存在を示す所定周期のパルス信号を送信する送信側モジュールは、並列に設けられた複数の信号発生部にてパルス信号を時分割に発生させ、これらのパルス信号を1つの時系列なパルス信号にまとめる。そしてこのパルス信号を出力制御用のリレーを介して受信側モジュールに向けて出力するようにし、該リレーの常開端子および常閉端子にそれぞれ現れる信号を監視して異常の有無を判定し、異常検出時には前記パルス信号の発生を停止させる。
(もっと読む)
プログラマブルコントローラ
【課題】シーケンスプログラムの実行速度の高速化を図る。
【解決手段】プログラムメモリ9からDMAコントローラ15a−15cで各RAM13a−13cにシーケンスプログラムを転送すると共に、各CPU11a−11cは、対応する各RAM13a−13cに格納するシーケンスプログラムのサイクルごとの実行において、互いにフェッチし実行する命令が重複せず、かつ、各サイクルごとでは互いに異なる命令を同時並行的にフェッチすると同時に、互いに異なる命令を同時並行的に実行する。
(もっと読む)
安全制御装置
【課題】低コストで実現可能かつ拡張性に優れた安全制御装置を得ること。
【解決手段】本発明にかかる安全制御装置は、プロセッサ(2Aまたは2B)およびプロセッサが演算を行う際に利用するRAM(4Aまたは4B)を備え、それぞれ同じ処理を並列に実行し、得られた処理結果をRAM(4Aまたは4B)へ格納する情報処理部A,Bと、RAM4A,4Bに格納されている処理結果を照合する照合回路5と、照合回路5による照合結果およびRAM4A,4Bに格納されている処理結果に基づいて、処理結果に従って動作するように指示する信号、または安全側で停止するように指示する信号を生成し、制御対象機器へ出力する出力回路6と、を備える。
(もっと読む)
制御盤
【課題】工業用プラントの制御盤において、低電圧化、小型化が進むなかで入出力信号線や電源供給線から侵入する外来ノイズの影響が高まり、制御盤の誤動作によるプラントの稼動停止の問題が深刻になってきた。
【解決手段】制御盤にノイズ検出演算装置10と制御盤コントローラ20を追加し、入出力信号線や電源線のノイズを検出し、複数の信号を演算して、外来ノイズを判定する。制御盤処理装置4が外来ノイズによって誤動作し、制御盤が停止した場合には、制御盤コントローラ20はノイズ検出演算装置10のノイズ判定結果と制御盤処理装置4の状態を把握しながら制御盤コントローラ20の所定のプログラムにより、制御盤処理装置4を再起動し、制御盤を復帰する。
(もっと読む)
故障予測装置
【課題】駆動機構における故障を非常に簡易な制御によって確実かつ容易に予測することができ、しかも、安全かつ利便性が損なわれない位置で物体を停止させることで、製品として最低限の機能を果たすことができる故障予測装置を提供する。
【解決手段】制御手段60は、変位検知手段50から出力されたパルス信号に基づき便器の移動距離を算出し、アクチュエータ30が作動する毎に移動距離を積算し、アクチュエータ30の耐久寿命を便器の移動距離に換算して定めた寿命距離と前記積算値とを比較し、積算値が寿命距離に到達した場合に、アクチュエータ30は故障が予測される状態にあると判定して、その旨の警告を行う。また、警告後に、操作部70の入力操作によるアクチュエータ30の作動を下降のみに規制する。
(もっと読む)
デジタル安全保護系システム
【課題】デジタル安全保護系システムの共通要因故障対応のバックアップ回路の増大を抑制する。
【解決手段】安全保護系システムは、原子炉停止系を制御するRPS制御部61と工学的安全施設を制御するESF制御部62有する。RPS制御部61は、内部に形成される回路31、33が書き換え可能なFPGA素子30を用いて、受信したプラント状態信号と予め定められた設定値とを比較するRPS設定値比較部3a〜3dと、比較結果に基づいてFPGA素子30を用いて原子炉のスクラム弁を動作させる信号を出力するRPS論理回路部4a〜4dを有する。ESF制御部62は、ソフトウェアを介して回路41、43を形成するCPU素子40を用いて、プラント状態信号と予め定められた設定値とを比較するESF設定値比較部7a〜7dと、比較結果に基づいてCPU素子40を用いてプラント機器を動作させる信号を出力するESF論理回路部8a〜8cを有する。
(もっと読む)
安全関連制御ユニットおよび自動化設備の制御方法
【課題】安全関連制御ユニットの外部で発生した故障に対する適用性を高めると同時にコストを低減する。
【解決手段】複数のセンサ(16)および複数のアクチュエータ(14)を備え、前記アクチュエータ(14)を制御するための複数の制御命令(44, 46, 48)を含み、複数の第1プログラム変数を処理することにより前記制御命令の少なくとも一部(44)を実行するように設計されている第1プロセッサ(20)を備える。第一プロセッサ(20)は第1の規定タイミングに少なくとも1つの前記第1プログラム変数(FSV1A)に対して存在する瞬時値(FSV1A(n))に応じて前記第1プログラム変数(FSV1A)の第1試験値(CRCFSV1A(n))を決定するように設計されている。さらに前記第1試験値(CRCFSV1A(n))に対応する第2試験値(CRCFSV1B(n))を決定するように設計されている前記第2プロセッサ(22)と、前記瞬時値(FSV1A(n))、前記第1試験値(CRCFSV1A(n)、および前記第2試験値(CRCFSV1B(n))を記憶するように設計されているデータメモリ(92)とを備える。
(もっと読む)
安全関連制御ユニット用アプリケーションプログラムの生成方法および装置
【課題】ユーザプログラムの生成ひいては安全コントローラの製造の柔軟性をさらに向上させて安全コントローラの迅速かつ安価なプログラミングを可能とする。
【解決手段】ユーザプログラムのソースコード(52)を生成するステップであって、前記ソースコード(52)が前記アクチュエータ(24)を制御するための複数の制御命令(160, 162)および診断レポートを生成するための複数の診断命令(164, 166)を含み、前記制御命令(160, 162)の実行中に安全関連プログラム変数がフェイルセーフ的に処理されるステップと、前記ソースコード(52)に基づいてマシンコード(70)を生成するステップと、少なくとも1つのチェックサム(102, 104)を決定するステップであって、前記チェックサム(102, 104)が前記マシンコード(70)の少なくとも一部に対して決定され、前記チェックサム(102, 104)の決定に際して前記診断命令(164, 166)が無視されるステップと、を含む方法。
(もっと読む)
21 - 40 / 141
[ Back to top ]