
Fターム[5H223BB05]の内容
Fターム[5H223BB05]に分類される特許
1 - 20 / 70
ロボットコントローラ
【課題】発生頻度が異なる複数のログデータについて個々の発生パターンを表示する。
【解決手段】ロボットコントローラ3は、発生頻度が異なるワーニングデータを発生順に記憶するワーニングデータ記憶領域7aとエラーデータを発生順に記憶するエラーデータ記憶領域7bとを別々に用意し、ログデータの表示要求が発生すると、それらワーニングデータ記憶領域7aに発生順に記憶されているワーニングデータとエラーデータ記憶領域7bに発生順に記憶されているエラーデータとを時系列に並替えて表示する。発生頻度の差に拘らず発生頻度が高いワーニングデータだけでなく発生頻度が低いエラーデータをも表示することができる。
(もっと読む)
調節弁の異常診断方法および装置

【課題】プロセス運転中、簡易にかつ正確に、調節弁の異常診断を行う。
【解決手段】調節弁200への操作器圧Poおよび調節弁200からの開度Xをサンプリングし、今回のPo(k)と前回のPo(k−1)とからPo(k)の変化速度vPo(k)を求め、今回のX(k)と前回のX(k−1)とからX(k)の変化速度vX(k)を求める。そして、vPo(k),vX(k)のどちらも小さい場合にのみ重みw1(k)を1とし(他の場合は0)、w1(k)が1の時のvPo(k)とvX(k)と調節弁200の正常時の静的な入出力関係を示す線形近似式F1とから、異常診断判断期間中の開度カテゴリi毎の異常診断指標Fq〔i〕を求める。
(もっと読む)
異常監視システムおよび異常監視方法
【課題】電動機で駆動される設備の初期の異常を高精度かつ簡易に検知することができる異常監視システム等を提供すること。
【解決手段】統計的監視指標化処理部275は、事前に設備の正常動作時の電動機のトルク電流実績と、速度実績と、移動量実績の時系列データを取得し、トルク電流実績を2回積分した電流実績2回積分値と、速度実績を1回積分した速度実績1回積分値と、移動量実績値との相関関係の平均的挙動を求める。一方、統計的監視指標化処理部375は、操業時において設備から得られるトルク電流実績を2回積分した電流実績2回積分値と、速度実績を1回積分した速度実績1回積分値と、移動量実績値との相関関係について、前記設備の正常動作時の相関関係の平均的挙動からの外れ度を算出する。判定処理部377は、算出された外れ度をもとに設備の異常を判定する。
(もっと読む)
マルチレート系の高速周波数応答同定法および高速周波数応答同定装置
【課題】制御出力のサンプリング周期が制御入力のそれの偶数倍である入力多重マルチレート系において、制御入力側のサンプリング周期における制御対象の周波数応答を同定する。
【解決手段】制御対象をFIRモデルにより表し、M系列信号の周期Mpとマルチレート比Pに基づきデータ長MpP-1分のM系列信号を生成し、前記M系列信号と、前記M系列信号を入力して制御対象から得られる出力データに基づき、制御対象のインパルス応答推定値を計算し、インパルス応答推定値を離散フーリエ変換することによって、前記制御対象の周波数応答を同定する。
(もっと読む)
機械設備の管理システム
【課題】機械設備の監視情報及び機器情報を管理し、ユーザが各情報を閲覧することができる、機械設備の管理システムを提供する。
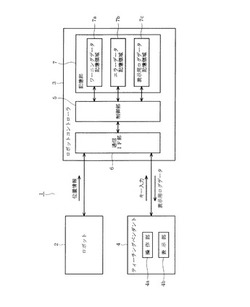
【解決手段】監視情報が格納される第1の記憶手段104,105,106と、第1の通信手段101を介して機械設備211a〜231から監視情報を取得し、第1の記憶手段に格納する第1の情報取得手段102aと、機器情報が格納される第2の記憶手段107,108と、第2の通信手段112を介して機器情報を取得し、第2の記憶手段に格納する第2の情報取得手段116aと、監視情報を画面情報として第2の通信手段を介してユーザのコンピュータ3に送信する第1の情報公開手段102bと、機機器情報を画面情報として第2の通信手段を介してユーザのコンピュータ3に送信する第2の情報公開手段116bと、を備える。
(もっと読む)
モニタリングシステム、通信装置、通信制御方法
【課題】 広帯域の帯域制限を考慮した優先度制御を実現可能なモニタリングシステムを提供する。
【解決手段】 複数の通信端末が接続されるローカルネットワークと管理センタが接続される広域ネットワークとを相互接続するネットワーク相互接続装置を用い、監視対象を管理センタから遠隔監視するモニタリングシステムにおいて、
ネットワーク相互接続装置は、複数の通信端末から収集したデータを基にアラーム検出及びアラーム状況に応じたデータ統計処理を行い、
前記アラーム状況と、ローカルネットワークの通信状況と、広域ネットワークの通信状況とから、前記管理センタに送出するデータを選択することで、モニタリングシステムにおいてネットワークの容量を十分に活用しつつ、ネットワーク容量の不足時及び変動時にもアラーム判定処理に必要なデータ通信を確保することができる。
(もっと読む)
自動機械の制御装置
【課題】稼働率の低下を抑えること。
【解決手段】サーボ制御部17が、サーボモータ21の回転を制御し、異常検出部18が、サーボ制御部17への電源供給遮断状態(すなわち、サーボ制御部17によるサーボモータ21の制御が非制御の状態)において、エンコーダ23によって検出されたサーボモータ21の回転位置(エンコーダ値)を取得するとともに、取得したエンコーダ値に基づいてブレーキ22の異常を検出するように制御装置1を構成する。
(もっと読む)
フィールド機器管理システム
【課題】フィールド機器の状態を監視するに際して、フィールド機器の制御系統や監視系統を成す通信路を通じた通信の状態を確認できるようにする。
【解決手段】1又は複数のフィールド機器10と、フィールド機器10と第1の通信路18を介して通信可能に接続されたコントローラ17と、フィールド機器10と第2の通信路16を介して通信可能に接続された機器監視ユニット15と、を備え、機器監視ユニット15は、第1の通信路18及び第2の通信路16の一方を通じて送信された信号に対してフィールド機器10から第2の通信路16を通じて受信される応答に基づいて、フィールド機器10の状態と第1及び第2の通信路18及び16の一方又は双方を通じた通信の状態とをチェックするチェックツールを備える。
(もっと読む)
水利施設の管理システムとその管理方法
【課題】水利施設の異常を現地に出かけることなく中央監視センターで迅速にリアルタイムで把握し、異常の原因と場所と規模を推定する。
【解決手段】水路3に沿って水位計10を設置し、計測された水位計測データL1、L2を送受信装置12を通じてセンターサーバ14に送信するよう構成し、実際の水路の情報に基づいて予め水理解析モデルを作成し、この水理解析モデルに基づいて異常事象の種別毎に水面形がパターン化された異常対照データと正常時の水面形がパターン化された正常対照データとを求め、センターサーバ14の記憶部にこれら求められたデータを入力し、センターサーバ14が、収集された水位計測データL1、L2を記憶部に入力された異常対照データと正常対照データとに基づいて比較対照して異常の有無を判別し、異常を判別すると、異常対照データに基づいて水理解析し異常の原因と場所と規模を表示部に表示させる。
(もっと読む)
遠方監視制御システム
【課題】ある監視制御装置でシステム生成情報の変更を行った場合に、その監視制御装置に関連する監視制御装置のシステム生成情報の変更も自動で行えるようにした遠方監視制御システムを得る。
【解決手段】子局遠方監視制御装置A5で、保守用装置6を用いてシステム生成情報(テスト用)56を変更した場合、自動反映処理部53により、親局遠方監視制御装置1の自動反映処理部13に通知し、親局遠方監視制御装置1のシステム生成情報(テスト用)16を変更し、これらの変更されたシステム生成情報(テスト用)56、16をそれぞれのシミュレーション処理部54、14により、シミュレーションによるチェックを行い、結果がよければシステム生成情報(テスト用)56、16をそれぞれシステム生成情報(運用用)55、15にコピーするようにした。
(もっと読む)
構造物における腐食の進行の監視箇所の特定方法、構造物における腐食の進行の監視方法
【課題】構造物に含まれる金属部材に急激に腐食が進行した場合であっても、その進行を手間をかけずに検知する。
【解決手段】金属部材からなる監視対象部位を含んでなる構造物における監視対象部位の腐食の進行の監視方法は、腐食が進行した場合に、監視対象部位において作用する応力が他の部位に比べて早期に金属部材の許容応力度を超える部位を監視すべき箇所として特定し(STEP3)、特定した監視すべき箇所の腐食の進行を監視する。
(もっと読む)
ローカライズされたプロセス制御オブジェクトの表示方法および装置
【課題】ローカライズされたプロセス制御オブジェクトを表示する例示的な方法および装置を提供する。
【解決手段】開示される例示的な方法は、プロセス制御システムに関連するプロセス制御オブジェクトを視認する要求を受信し、プロセス制御オブジェクトに基づいて、タグを含むデバイス記述ファイルを選択し、要求に関連するロケールに基づいて一組のロケールテンプレートを選択し、プロセス制御オブジェクトに基づいて、一組のロケールテンプレートからロケールテンプレートを選択し、選択されたロケールテンプレートの部分をデバイス記述ファイル内のタグに挿入すること、によって、表示のためにプロセス制御オブジェクトを処理することを含む。
(もっと読む)
移動体の分散制御システム
【課題】副制御ユニットに接続された電装部品に関連する異常があった場合に、通信負荷を軽減して、異常に対する対応を迅速にする。
【解決手段】電装部品50のそれぞれに対応して設けられ、記憶装置(内蔵RAM23、不揮発性SRAM25)と、電装部品50に接続された副制御装置21とを有する複数の副制御ユニット(スレーブ基板20)と、副制御ユニットに指令を送信することで移動体の動作を制御する主制御ユニット(マスタ基板10)とを備え、副制御ユニットは、接続された電装部品50に関連する異常を検出した場合に、当該異常の種類に応じて移動体が行うべき動作を示す情報である動作要求データを主制御ユニットに送信するとともに、異常の詳細を示すエラー・ステータス・データを主制御ユニットに送信せず記憶装置に記憶させるように移動体の分散制御システムを構成する。
(もっと読む)
シミュレーション装置
【課題】被制御装置の模擬が実行可能になるまでに要する時間が短く、且つ、被制御装置を正確に模擬することができるシミュレーション装置を提供する。
【解決手段】シミュレーション装置20は、制御装置10の制御対象である被制御装置を模擬するものであって、被制御装置を構成する機器毎の特性を示す情報が格納された設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が予め設定された基準速度よりも速い機器を模擬するシミュレーションPLC21と、上記の設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が基準速度よりも遅い機器を模擬するシミュレーションPC22とを備える。
(もっと読む)
センサ故障検知方法、センサ故障検知装置、及び、プログラム
【課題】センサの故障等を検知することができるセンサ故障検知方法、センサ故障検知装置、及び、プログラムを提供する。
【解決手段】まず、処理装置に配置されているセンサがON/OFFしたか否かを判別する(ステップS1)。センサがON/OFFしたと判別すると(ステップS1:Yes)、センサが異常パターンに該当するか否かを判別する(ステップS2)。センサが異常パターンに該当すると判別すると(ステップS2:Yes)、センサの変化情報を作成する。次に、作成したセンサの変化情報を処理装置の操作パネルに表示する(ステップS3)。そして、センサの変化情報をセンサ情報記憶部に記憶する(ステップS4)。
(もっと読む)
収集装置、センサ装置および収集方法
【課題】複数のセンサ装置による検出値の取得時刻の誤差を解消すること。
【解決手段】収集装置100はデータの収集を開始する前に、データ収集周期設定を行う(ステップS101)。つぎに、収集装置100は、各センサ装置110に対するセンサの設定を行う(ステップS102)。センサ装置110は収集装置100から送信されたデータ収集設定データが受信され、自装置に設定されると、データの取得時刻を計算する(ステップS111)。センサ装置110は送信されたデータ取得設定データに基づいて、データの取得時刻が計算され、計算された取得時刻に基づいて、データ取得を行う(ステップS112)。その後、センサ装置110はデータ送信周期に基づいて、取得データを収集装置100へ送信する(ステップS113)。収集装置100は各センサ装置110から送信されたデータを受信することによって、データ収集処理を行う(ステップS103)。
(もっと読む)
安全計装システムのソレノイドを検査するための方法、装置、および製品
安全計装システム(SIS)のソレノイドを検査するための例示の方法、装置、および製品を開示する。開示するバルブ位置制御装置(100)は、ソレノイドの状態を制御するリレー(165)と、ソレノイド検査信号をリレーに伝送するトランスミッタ(225)を含むバルブポジショナ(105)と、1つ以上のワイヤ(175)を通じてソレノイド検査信号とリレーとを通信可能に連結する電気接点と、ソレノイド検査信号を生成し、ソレノイド検査信号をリレーに伝送したときのソレノイドの反応をモニタして、ソレノイドの動作を検証するソレノイドテスタ(220)と、を備えている。 (もっと読む)
フィールドバスシステム
【課題】ダウンロードした更新ソフトウェアの正当性をアクティブ/非アクティブの切替前に検証できるようにする。
【解決手段】コントローラ2に第1のメモリエリアM1と第2のメモリエリアM2を設け、第1のメモリエリアM1をアクティブなメモリエリアとし更新前ソフトウェアS1を記憶させ、第2のメモリエリアM2を非アクティブなメモリエリアとし更新ソフトウェアS2をダウンロードさせる。シミュレーション用マイクロプロセッサ2−6は、ダウンロードされた更新ソフトウェアS2を用いてフィールド機器3の運転の制御をシミュレーションする。このシミュレーションの実行状態はホストコンピュータ1でモニタすることができる。オペレータは、シミュレーションの実行状態の判定結果が「良」であった場合、コントローラ2へアクティブ化の指令を送る。これにより、コントローラ2において、アクティブ/非アクティブの切り替えが行われる。
(もっと読む)
プラントの監視制御システム及び水処理施設のトラブル認識用プログラム
【課題】無人状態で合っても、故障発生前に予兆を確実に検知し通報することにある。
【解決手段】プラント設備系1を構成する制御対象機器を制御するコントローラ3とプラント設備系1の状態を監視する監視制御系10とを有するプラントの監視制御システムにおいて、コントローラ3は、制御対象機器に対する基本動作パターン及び基本プロセス変量パターンに所望の逸脱許容値を加味した参照パターンデータを記憶する参照パターン設定部34と、運転・停止制御による制御対象機器の動作パターン、プロセス変量パターンと参照パターン設定部34の対応する参照パターンデータとを比較し、前記参照パターンデータを超えたとき、故障に至る前段階の予兆となるパターン異常を検知し、前記監視制御系10に伝送するパターン認識処理部35とを備えたプラントの監視制御システムである。
(もっと読む)
プラント運転監視装置およびその方法
【課題】廃棄物情報の移動処理に係わる不良が発生した場合でも、監視装置が有する廃棄物情報を、実際の廃棄物情報に追従可能とすることにより、稼働率が低下することがない高信頼性のプラント運転監視装置およびその方法を提供する。
【解決手段】監視装置1は、監視対象である制御装置2が制御する工程に存在する廃棄物の廃棄物情報を記憶した廃棄物情報テーブル11と、制御装置2が制御するプラント4の動作状態を時系列的に並べた履歴として記憶した監視装置履歴テーブル12と、制御装置2からの廃棄物の移動状態を管理する移動管理テーブル13と、廃棄物の管理位置毎に廃棄物情報の検索条件を定義する移動パターンテーブル14と、移動パターンテーブル14の検索条件により移動管理テーブル13の移動状態の情報から廃棄物情報テーブル11の廃棄物情報の移動状態を判断する移動状態判断手段102とを備える。
(もっと読む)
1 - 20 / 70
[ Back to top ]