
Fターム[5H301BB06]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 物品搬送用 (624) | クレーン (26)
Fターム[5H301BB06]に分類される特許
1 - 20 / 26
走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体
【課題】被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置を提供する。
【解決手段】ガラス板Gを搬送するスタッカクレーンSを制御する場合に、ガラス板GのスタッカクレーンSへの搭載及びガラス板Gにおける振動の発生が共に検出されたとき、スタッカクレーンSを減速又は停止させる。
(もっと読む)
搬送車システム

【課題】左右の車輪を独立して駆動可能な搬送車において、曲線部走行時にモータの過負荷を防止する。
【解決手段】搬送車システムにおいて、速度パターン発生部62は、搬送車が曲線部を走行するときに2個の走行車輪に対して基準速度に対して内外輪にそれぞれ速度差が生じるように、速度指令を発生して2個のモータ26,29に与える。速度パターン発生部62は、搬送車が加速中に曲線部に進入することを光電センサ47が検出すれば、第1速度比率変化区間において、外輪となる走行車輪に対応するモータに対して進入時の加速度a01以下の加速度となるような速度指令を生成して与え、内輪となる走行車輪に対応するモータに対して外輪となる走行車輪の速度より速度差分以上を減らした速度となるような速度指令を生成して与える。
(もっと読む)
搬送車
【課題】荷物の移送効率を低下させることなく載置された荷物が搬送中の荷物が搬送車から落下することを防止することのできる搬送車を提供する。
【解決手段】搬送車100の載置部102は、搬送対象である荷物が載置される部分であって、載置部102の側方に配置され載置部102からの荷物の落下を防止する落下防止体103と、載置部102の側方に配置される出現位置と本体部101側に配置される待避位置との間で落下防止体103を転換する転換手段104とを備える。
(もっと読む)
搬送車及び搬送システム
【課題】搬送車において、走行領域に存在する障害物を好適に検出する。
【解決手段】搬送車(200)は、軌道(100)に沿って走行する走行部(210)と、走行部に取り付けられており、被搬送物(400)を積載して搬送可能な搬送部(220)と、搬送部の前面部又は後面部の端部周辺に設けられた一対の障害物センサ(261,262)とを備えている。一対の障害物センサは、正面視して互いにハの字状となるように傾斜して配置されていると共に、正面視して互いの走査範囲(A1,A2)が交差するように配置されている。
(もっと読む)
走行車とその走行制御方法
【課題】 3相誘導走行モータを備えた走行車を、目標速度パターンに従って走行させる。
【構成】 走行モータの速度毎の制御ゲインとを記憶し、記憶した目標速度と速度毎の制御ゲインとにより、3相誘導走行モータの駆動用インバータを制御する。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】隣り合うものの共振周波数が異なるように移動体が移動する移動路に沿って等間隔に順に配置される複数種類の共振タグのそれぞれに専用のアンテナと、このアンテナの各々を介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出できる位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】隣り合うものの偏波面または共振周波数が異なるように移動体が移動する移動路に沿って順に配置される複数種類のRFIDタグのそれぞれに専用のアンテナと、このアンテナの各々を介してRFIDタグに記憶された固有の情報を読み取るタグ読取部と、タグ読取部によりRFIDタグから読み取った固有の情報に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】移動体が移動する移動路に沿って等間隔に順に配置される共振タグに専用のアンテナと、このアンテナを介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
無人搬送装置とその搬送経路決定方法
【課題】搬送経路を自動決定することができ、搬送機器の詳細な位置や通過時間を監視する必要がなく、そのためのセンサ、通信路、および計算装置が不要であり、精度の高い予測が不要であり、混雑予測に失敗しても適切な経路を選択することができ、かつ省エネルギー化を図ることができる無人搬送装置とその搬送経路決定方法を提供する。
【解決手段】記憶装置17により、搬送機器11の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、搬送制御装置18により、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定する。
(もっと読む)
移動体システム
【構成】 複数のコイルからなるアレイを検出ヘッドに設け、アレイ長と等しいピッチで走行経路に磁気マークを設ける。磁気マークとコイルとの相互作用から、磁気マークを基準とする移動体の位置を求める。
【効果】 磁気マークを連続的に配置しなくても、移動体の位置を求めることができる。
(もっと読む)
物品搬送装置
【課題】反射体のコンパクト化を図りながら、走行体の走行位置を検出しながら走行体を移動させることができる物品搬送装置の提供。
【解決手段】投受光手段21は、反射体22の中央部に向けて測距用光を投光するように構成され、走行経路に直交する方向において投受光手段21と異なる位置に配設され、且つ、投受光手段21にて投光する測距用光と平行になるように反射体22に向けて光を投光して反射体22にて反射された光を受光する補正用投受光手段23が設けられ、補正用投受光手段23にて反射体22にて反射された光を受光していないと判別すると、測距用投光方向及び補正用投光方向を走行経路に直交する方向での投受光手段21と補正用投受光手段23との並び方向において補正用投受光手段23が位置する側とは反対側に変更すべく、投光方向変更手段の作動を制御する投光方向変更制御手段が設けられている。
(もっと読む)
走行車システム
【構成】 コントローラから走行車に搬送指令を割り付け、物品の搬送と受け渡しとを行う。コントローラは、走行車からの搬送指令の完了報告の受信前に、次の移動先を指示し受け渡しを指示しない移動予約を走行車に送信し、完了報告を受信すると次の搬送指令を送信する。走行車は搬送指令を完了するとコントローラへ報告し、移動予約を受信すると、実行中の搬送指令の完了後に移動予約で指示された移動先へ走行する。
【効果】 走行車がコントローラからの指令を待って停止する期間が無く、また走行車が搬送指令を2重に持つタイミングが生じない。
(もっと読む)
移動体の走行制御方法
【課題】同一軌道内を移動する複数の移動体を、近接した位置関係において安全に且つ効率的に走行させる。
【解決手段】2つの移動体A,B間の相対接近速度に対応した限界接近距離Y0を予め設定しておき、移動中の2つの移動体A,B間の距離Yを測定するとともに、両移動体間の相対接近速度Xを演算し、両移動体A,B間の前記距離Yを前記相対接近速度Xに対応する限界接近距離Y0と比較し、Y<Y0の場合に両移動体を直ちに停止させる。同一軌道内を移動する複数の移動体の走行制御を、2つの移動体A,B間の相対接近速度に対応した限界接近距離Y0に基づいて行うので、複数の移動体A,Bを近接した位置関係において安全に且つ効率的に走行させることができる。
(もっと読む)
搬送車システム
【課題】搬送効率を維持しながら安全を確保することが可能な搬送車システムを提供する。
【解決手段】本発明に係る搬送車システムは、物体を検出するライトカーテン30A〜30Fをクレーン10の走行経路20周辺に設けた搬送車システムであって、ライトカーテン30A〜30Fの物体を検出したという検出結果を受信したとき、クレーン10の速度を制御する制御手段と、ライトカーテン30A〜30Fとクレーン10との間の距離に応じて、ライトカーテン30A〜30Fの検出結果を前記制御手段に送信するか否かを判定する判定手段とを備える。
(もっと読む)
車両の位置を決定する方法および装置、コンピュータプログラムおよびコンピュータプログラム製品
【課題】本発明は、経路に沿って移動する車両の位置を決定するための装置および方法に関連する。
【解決手段】この経路に沿ってマーカ、特にコードキャリアまたはバーコードが配置されている。この方法は、車両に搭載されたデジタルカメラによってマーカが検出され、デジタルカメラの検出範囲またはカバー範囲内にある少なくとも一つのマーカ像の位置の画像処理から、一つの所定のマーカまたは複数の所定のマーカに対する、経路に沿った車両の主移動方向および主移動方向に対して直角をなす少なくとも一つの方向における車両の相対位置が決定されることを特徴とする。本発明はまた、コンピュータプログラムおよびコンピュータプログラム製品に関する。
(もっと読む)
搬送車両および搬送車両の自動走行制御方法
【課題】軌道修正を自動で行うことにより、作業員の労力の軽減ならびに軌道復旧完了までに要する時間を短縮する。
【解決手段】ガイドラインに沿って自動走行する搬送車両であって、車体の走行方向に沿って間隔をおいて配置されるとともに、ガイドラインに対する位置ズレ量を検出するための複数のセンサと、車体の走行方向に沿って設けられた第1車輪と、第1車輪に対して走行方向と平行に設けられた第2車輪と、センサの検出結果に基づきガイドラインに対する車体の位置ズレ量およびズレ角を推定し、推定した位置ズレ量およびズレ角に基づいて第1車輪および第2車輪の少なくとも一方を駆動制御する制御手段とを具備する搬送車両を提供する。
(もっと読む)
レーザーポインタを用いた天井クレーンによる搬送方法及び天井クレーンシステム
【課題】レーザーポインタにより指示された3次元空間における目標搬送位置へ搬送物を搬送する方法及び天井クレーンを提供する。
【解決手段】コントローラを介して自動運転される天井クレーンを用いて搬送物を搬送開始位置から目標搬送位置の真上までの3次元空間における搬送径路に沿って自動的に搬送する方法であって:スポット光を撮像するための複数のカメラを設置し;レーザーポインタによりレーザー光線を目標搬送位置床表面に照射してスポット光を生成し;該生成されたスポット光を少なくとも1台のカメラで撮像し、該撮像データを利用してスポット光重心位置の3次元空間座標を決定し;前記3次元空間座標を前記目標搬送位置データとして利用して前記コントローラによって前記搬送径路を決定し、該搬送径路に沿って前記搬送物を前記搬送開始位置から前記目標搬送位置の真上まで自動的に搬送する;ことを含む自動搬送方法。
(もっと読む)
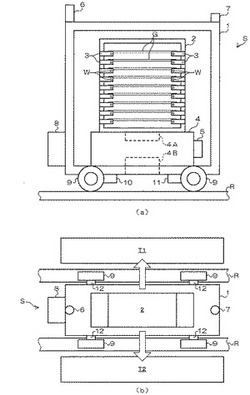
走行台車とそのシステム
【課題】滑りを解消するように駆動モータをフィードバック制御することにより、目標とする速度パターンからの遅れを抑制した走行台車を提供する。
【解決手段】走行台車2の走行車輪8,9の回転数から走行距離をエンコーダ11,12で求め、台車2の絶対位置をリニアセンサ13,14で求める。所定の時間間隔でのエンコーダ値の変化分とリニアセンサ値の変化分との差を滑りとし、滑りを解消する側に走行制御部16,17を介して走行モータ6,7を制御する。
(もっと読む)
移動体システム
【構成】 移動体A,Bの移動経路に沿ってリニアセンサL1〜L4,R1〜R4を2列に間隔を置いて配置し、移動体A,Bに設けた磁石のリニアセンサに対する相対位置を求める。求めた相対位置にリニアセンサの原点座標を加算し、移動体の絶対位置を求める。
【効果】 移動体の絶対位置を地上側で迅速かつ高精度に検出できる。
(もっと読む)
物品収納設備
【課題】搬送能力の向上を図ることができながら、部品の交換作業やメンテナンス作業の複雑化を抑制できる物品収納設備の提供。
【解決手段】制御手段8が、一部作動モードにおいては、複数台の移動体3のうちの走行経路6の長手方向に沿う並び順序において物品支持部5に近接する側の一部のものを物品搬送作動用の移動体3として選択する状態で、その選択された一部の移動体3を物品支持部5と複数の収納部4のうちの移動体3が移載対象とする収納部4との間を走行させ且つ複数台の移動体3のうちの物品搬送作動用の移動体3として選択されない移動体3を物品搬送作動用の移動体3として選択された移動体3の走行範囲から退避させた退避位置30に走行させる形態で物品Bの搬送を行わせるように、複数台の移動体3の作動を制御する一部移動体作動搬送処理を実行するように構成されている。
(もっと読む)
1 - 20 / 26
[ Back to top ]