
Fターム[5H301BB07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 物品搬送用 (624) | フォークリフト (15)
Fターム[5H301BB07]に分類される特許
1 - 15 / 15
移動体の位置検出方法

【課題】フォークリフトなどの移動体の位置及び向きを簡易に推定する方法を提供する。
【解決手段】複数の柱が平面視で格子状に配置された対象エリア内において、検出感度に指向性を有する複数のRFIDタグを、指向性の向きが該格子方向と一致するように複数の柱に配備する。また、フォークリフト5に、RFIDタグを検出するリーダ装置と、RFIDタグとリーダ装置の間で電波の送受信を行うアンテナとを配備する。さらに、検出されるRFIDタグの対象エリア内における配置とフォークリフト5の対象エリア内における推定位置との関係を示す位置推定パターンを備えておく。複数の柱に配備されたRFIDタグを、アンテナから送受信される電波を介して、リーダ装置で1つ以上検出し、検出されたRFIDタグの対象エリア内における配置に対応する位置推定パターンを判別することで、フォークリフト5の位置を推定する。
(もっと読む)
移動体の制御システム

【課題】無線通信装置の受信能力の低下による通信障害の発生を予測できる移動体の制御システムを提供すること。
【解決手段】移動体が、その走行位置を検出する走行位置検出手段と、無線通信装置にて受信する運行情報及び走行位置検出手段にて検出される走行位置情報に基づいて走行作動を制御する走行制御装置とを備えて構成され、運行制御装置が、移動体が無線通信装置にて送信する走行位置情報Pp、及び、無線通信装置が通信中継装置から受信している無線信号の受信強度を示す受信強度情報Prに基づいて取得される移動体の走行位置に対応した受信強度と、当該走行位置についての基準受信強度Ls1・Ls2とを比較して、無線通信装置の受信能力が低下している受信能力低下状態であるか否かを判別する受信能力評価手段を備えて構成されている移動体の制御システム。
(もっと読む)
測距方法及び車載測距装置
【課題】床面に近い位置に置かれた障害物を精度良く検知できる測距方法を提供する。
【解決手段】発光部から出力された測定光を所定周期で繰り返し走査して対象物からの反射光を受光部に導き、測定光と反射光の検出時間差に基づいて対象物までの距離を算出する測距装置を車両に取り付けて、走査面が測定対象平面と交差するように測定光を走査して、測定対象平面または対象物までの距離を算出し、所定の走査角度で算出された距離に基づいて測定対象平面に平行な仮想平面を生成し、各距離を仮想平面からの鉛直距離に換算し、換算した鉛直距離と当該鉛直距離に対応する測定対象平面上の測定光の走査位置との相関を表す近似線を算出し、換算した鉛直距離が当該近似線から求まる鉛直距離より所定の閾値以上短い値を示す走査位置に対象物が存在すると検知する各ステップを所定の走査周期毎に繰り返す。
(もっと読む)
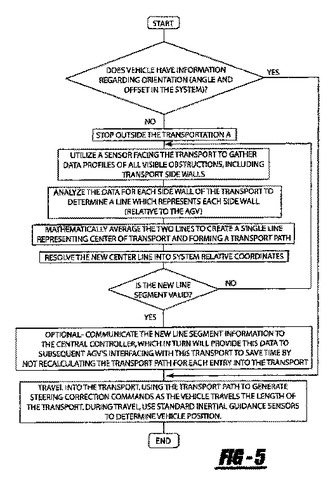
搬送体の自動積荷システム及び積荷方法
搬送体の自動的な積荷及び除荷のための方法及びシステムが開示される。第1の案内システムは、搬送体近傍の位置へ向かう走行路に従い、次いでセンサが搬送体を検出してデータを作成する。それによって、搬送路が決定され、自動案内車両が該搬送路に沿って搬送体へと移動して物品を引渡す。又、物品の引渡し、ならびに配置の後に、該自動案内車両は搬送体から出る。
 (もっと読む)
(もっと読む)
産業車両の操舵制御装置
【課題】 走行方向にかかわらず、車両を誘導線に沿って安定的に走行させることができるようにする。
【解決手段】 誘導線の位置を検出する前後2つの位置検出手段と、車両の走行方向を判定する判定手段と、誘導線の位置と走行方向とに基づいて転舵輪の目標操舵角を算出する算出手段と、転舵輪の実際の操舵角を検出する角度検出手段と、実際の操舵角が目標操舵角と一致するよう駆動装置を制御する制御手段とを備える。
算出手段は、走行方向が転舵輪側であると判定される場合には、転舵輪側の位置検出手段により検出される誘導線の位置に基づいて目標操舵角を算出し、走行方向が転舵輪と反対側であると判定される場合には、両位置検出手段により検出される誘導線の位置に基づいて目標操舵角を算出する。
(もっと読む)
位置検出システム
【課題】1つの基準マークを検出するだけで移動体の現在位置及び方位角を容易に校正することができる位置検出システムを提供することを課題とする。
【解決手段】倉庫1には東西方向に延在する通路A及びBと南北方向に延在する通路C〜Eが形成されている。タグ情報記憶部には各RFIDタグ3のID情報に対応して、このRFIDタグ3の位置と、このRFIDタグ3が配置されている通路A〜Eの方位角とがそれぞれ関連づけられて記憶されている。フォークリフト2の稼働中に位置算出部が推測航法技術によりフォークリフト2の現在位置を求めると共に、リーダがRFIDタグ3のID情報を読み取ると、校正部はそのID情報に関連したタグ位置と通路方位角をタグ情報記憶部から読み出し、これらタグ位置及び通路方位角をそれぞれフォークリフト2の現在位置及び方位角として位置算出部に入力する。
(もっと読む)
位置検出システム
【課題】現在位置に至るまでの位置情報の有無や進行方向に制限されることなく、簡易なセンサを用いて現在位置を正確に検出することができる位置検出システムを提供する。
【解決手段】フォークリフト1の磁気センサ5〜8の個数に対応した線形最大周期列の2値の数列を2次元平面に配置した所定のパターンで床面上に24個の磁性体Mが配列された磁性エリア13が形成されている。荷Wが荷置き位置S1の直上に位置するようにフォークリフト1の機台2を荷置き位置S1の手前に停止させて荷置き位置S1に荷Wを載置すると、機台2の底部に配置されている4つの磁気センサ5〜8でそれぞれ検知された床面の磁性エリア13の磁性体Mの極性が読み取られ、これらの極性の組み合わせに対応するセンサ配列パターンの位置が読み出される。これにより、フォークリフト1の機台2の位置並びに荷Wを載置した位置が把握される。
(もっと読む)
走行車の走行制御システム
【課題】 少なくとも第1の走行路と第2の走行路とが接続する接続点を有する走行路網において、第1の走行路を接続点に向かって第1の走行車が走行し、第2の走行路を接続点に向かって第2の走行車が走行する場合に、第2の走行車に対する第1の走行車の優先的な走行を容易に実現することができる走行車の走行制御システムを提供する。
【解決手段】 無人搬送車Vの走行制御システムSでは、カウンタ2及びリミットスイッチ3〜5により、接続点Pを含む接続エリアA内に存在する無人搬送車V1,V2の数が計数される。そして、カウンタ2の値が1以上の場合には、停止コマンド6により、接続エリアAの手前において無人搬送車V2が停止させられ、カウンタ2の値がゼロの場合には、赤外線投光器7により、接続エリアA内に無人搬送車V2が進入させられる。
(もっと読む)
周囲のスキャンの比較により移動ユニットの相対位置を検出する方法、移動ユニット、コンピュータプログラムおよびコンピュータ読み出し可能なデータ担体
【課題】高い精度および計算効率を達成する、周囲のスキャンの比較により移動ユニットの相対位置を検出する方法を提供する。
【解決手段】計算ユニットが第1のスキャンを反復的に後続のスキャンと比較し、第1のスキャンの時点における位置に対する後続のスキャンのそれぞれの時点における移動ユニットの新たな相対位置を検出し、その都度最後に求められた相対位置を先験情報として考慮する。
(もっと読む)
ずれ量検出装置
【課題】床上を走行する移動体において、予め決められた経路に対する移動体の移動方向のずれを検出する。
【解決手段】床面に位置情報発信体が配設された室内を、予め決められた移動経路に沿って移動する移動体に搭載されるずれ量検出装置において、位置検出用交信範囲に存在する前記位置情報発信体から取得した位置情報から前記移動体の現在位置を検出する第1の現在位置検出手段と、位置検出用交信範囲を包含するずれ検出用交信範囲に存在する前記位置情報発信体の取得した位置情報から前記移動体の現在位置を検出する第2の現在位置検出手段と、検出された現在位置を移動経路と照合し前記移動体の移動方向を特定する移動方向特定手段と、前記各現在位置検出手段により検出された各現在位置から移動方向に対するずれ量を検出するずれ量検出手段と、を備える。
(もっと読む)
物流用移動体の移動管理方法及び物流用移動体の移動管理システム
【課題】 本発明の目的は、別の端末を有する他の移動体や作業者の存在を考慮した上で移動体の最適な移動経路を選択することができる物流用移動体の移動管理方法及び物流用移動体の移動管理システムを提供にある。
【解決手段】 無線LAN17の端末11を備え、物品を入出庫する移動体が所定領域内に配置され、所定領域内は、移動自在の無線LAN17の別の端末11、12が複数存在する領域とし、所定領域を通るとともに移動体の移動先へ至る複数の移動経路Rが設定され、移動体が移動先へ向かう前に、移動体の端末11及び全ての別の端末11、12の位置情報を取得し、移動体の端末11及び全ての別の端末11、12の位置情報に基づき、複数の移動経路Rから移動体の移動に最適な移動経路Rを選択する。
(もっと読む)
荷役システム
【課題】荷保管エリアに進入して荷役作業を行うのに、スムーズに作業を行うことが可能な荷役システムを提供する。
【解決手段】 荷役システム1によれば、オペレータが荷役車両5のフットペダル20を踏み込んだ状態で、操舵輪12の操舵角度を認識し、操舵輪12の向きが直線走行路6に合致するように、操舵輪12を旋回させる。この後、オペレータがアクセラレータ22を操作して、荷役車両5を発進させると、荷役車両5は、直線走行路6を真っ直ぐに自律走行する。従って、再発進した直後の荷役車両5が、従来のように蛇行することがなく、荷役車両5が物品収納棚2に衝突するという不具合は起こらない。
(もっと読む)
所定領域内における車両位置の検出方法及び装置
【課題】格納施設内における車両位置の低コストで信頼性のある検出方法を提供する。
【解決手段】車両の動きのベクトルを検出し、車両が測定片の設置されたポイントを通過するときに絶対位置を検出して車両の参照位置を決定し、参照位置を基準にして動きベクトルのベクトル和を求めて、車両の現在位置を検出する。絶対位置の検出は車両に設けられた測定片のそれぞれの参照マーク(MS)と非接触な方法で相互に作用するところの、センサ装置によって実行され、個々の参照マーク(MS)は、車両が少なくとも2つの信号(ST1,ST2)によって同時にスキャンする反射及び非反射領域(R1, R2; D)を有する。参照位置の座標(x,y)と、測定片に対する車両の進行角度(α)は、これらの信号(ST1,ST2)の反射強度の時間プロファイルを評価することによって測定される。
(もっと読む)
攪拌搬送方法、及び搬送装置
【課題】 搬送対象物を攪拌しながら走行する攪拌搬送方法において、搬送装置の安定
走行を可能とする
【解決手段】 フォーク(支持手段)12によって支持した攪拌タンク14内で搬送対
象物を攪拌しながら走行するAGV(搬送装置)10を、フォーク12の上面に、走行方
向に対して左右に、攪拌タンク14の荷重を検知する圧力センサ16を備えて構成した。
AGV10の制御手段は、フォーク12に備えた圧力センサ16により攪拌タンク14の
荷重を検知し、検知した荷重に基いて偏荷重を判断し、偏荷重と判断した場合に、攪拌速
度及び走行速度を規制するように構成した。
(もっと読む)
移動体の走行制御装置
【課題】 スリップを起こさない範囲でできるだけ動作時間を短くできる移動体の走行制御装置を提供する。
【解決手段】 高さ位置を可変可能に設置された昇降台101と、移動方向の前後にそれぞれ形成された各車輪7、8と、各車輪7、8をそれぞれ駆動する各モータ5、6とを備えた移動体100を所定の路面102上に各車輪7、8を各モータ5、6にて駆動させて移動する走行の制御を行う移動体100の走行制御装置10において、昇降台101の高さの位置情報と各モータのトルク特性情報と路面102の摩擦特性情報と移動体100の構造上の固有値とを用いて移動体の指令曲線、各モータのトルク制限のパラメータを算出する指令・トルク制限パラメータ算出手段1と、算出された指令曲線、トルク制限のパラメータに基づいて各モータ5、6への指令値、トルク制限値を生成する指令値・トルク制限値生成手段2とを備える。
(もっと読む)
1 - 15 / 15
[ Back to top ]