
Fターム[5H301BB08]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 物品搬送用 (624) | 自動倉庫 (20)
Fターム[5H301BB08]に分類される特許
1 - 20 / 20
搬送車システム
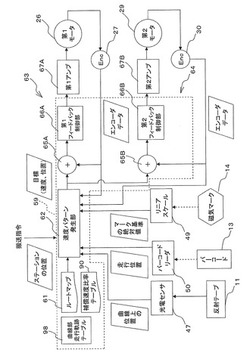
【課題】左右の車輪を独立して駆動可能な搬送車において、曲線部走行時にモータの過負荷を防止する。
【解決手段】搬送車システムにおいて、速度パターン発生部62は、搬送車が曲線部を走行するときに2個の走行車輪に対して基準速度に対して内外輪にそれぞれ速度差が生じるように、速度指令を発生して2個のモータ26,29に与える。速度パターン発生部62は、搬送車が加速中に曲線部に進入することを光電センサ47が検出すれば、第1速度比率変化区間において、外輪となる走行車輪に対応するモータに対して進入時の加速度a01以下の加速度となるような速度指令を生成して与え、内輪となる走行車輪に対応するモータに対して外輪となる走行車輪の速度より速度差分以上を減らした速度となるような速度指令を生成して与える。
(もっと読む)
移動体システム

【課題】移動体システムにおいて、移動体の干渉を移動開始前に判断するときの演算量を減らす。
【解決手段】自動倉庫1において、第1移載部32A及び第2移載部32Bは、平面内を移動可能に配置されている。メインコントローラ53は、第1移載部32Aが移動を開始する前に、第1移載部32Aの移動予定経路における干渉を確認する。メインコントローラ53は、ステップ分割部74と、ステップ算出部75と、干渉判断部76とを有している。ステップ分割部74は、移動予定経路における時間又は距離を複数のステップに分割する。ステップ算出部75は、両移載部の相互距離、移動向き、速度を考慮することで、干渉が生じる可能性がないステップを算出する。干渉判断部76は、第1移載部32A及び第2移載部32Bの位置計算をすることで干渉の有無を判断するものであり、干渉が生じる可能性がないステップについての両移載部の位置計算を省略する。
(もっと読む)
走行車システム
【課題】走行車の走行経路レイアウトの自由度を上げる。
【解決手段】走行車システム1は、走行車10と、走行時給電装置60と、停車時給電装置70と、を備える。走行車10は、受電コア51と受電コア51に巻かれたピックアップコイル53とを含む受電ユニット23と、受電ユニット23を介して受けた電力を蓄えるバッテリ27と、を有する。走行時給電装置60は、走行車10の走行時に、受電ユニット23に対向して非接触にて受電ユニット23に給電する一対の給電線63を有する。停車時給電装置70は、受電ユニット23に対向する給電コイル79を有し、走行車10の停止時に非接触にて受電ユニット23に給電する給電部75を有する。
(もっと読む)
走行体の追従制御システム及びその制御方法
【課題】平面上を自由に走行する先導無人車に後続無人車を追従させる追従制御システムを提供する。
【解決手段】追従システム1は、第一走行体20に配置され、第一走行体および第二走行体10の位置と車体方向を特定する走行体位置検出部2と、前記車体方向から複数の進行角度を発生させる進行角度発生部3と、進行角度ごとに将来制御パラメータを計算し、第二走行体の将来位置と第一走行体との距離を計算する第一差異計算部4と、将来制御パラメータと現在制御パラメータの差異を計算する第二差異計算部5と、複数の進行角度の中から最適進行角を選定する最適進行角選定部6と、最適進行角選定部6で選定された制御パラメータを駆動機構11に出力する走行指令部7で構成される。
(もっと読む)
走行車システム
【構成】 コントローラから走行車に搬送指令を割り付け、物品の搬送と受け渡しとを行う。コントローラは、走行車からの搬送指令の完了報告の受信前に、次の移動先を指示し受け渡しを指示しない移動予約を走行車に送信し、完了報告を受信すると次の搬送指令を送信する。走行車は搬送指令を完了するとコントローラへ報告し、移動予約を受信すると、実行中の搬送指令の完了後に移動予約で指示された移動先へ走行する。
【効果】 走行車がコントローラからの指令を待って停止する期間が無く、また走行車が搬送指令を2重に持つタイミングが生じない。
(もっと読む)
レールレス移動ラック
【課題】レールレス移動ラックにおいて侵入検知センサの光軸はずれを抑制すること。
【解決手段】移動ラックには隣り合う他のラックとの間への障害物の侵入を投光部271で出射された光が受光部272で受光されているか否かによって検出する侵入検知センサ27が設けられている。侵入検知センサ27は回転モータ29により回動可能に設けられ、回転モータ29は投光部271から出射された光が受光部272に入射するように台車の姿勢に対応して制御盤によって制御される。
(もっと読む)
搬送車システム
【課題】搬送効率を維持しながら安全を確保することが可能な搬送車システムを提供する。
【解決手段】本発明に係る搬送車システムは、物体を検出するライトカーテン30A〜30Fをクレーン10の走行経路20周辺に設けた搬送車システムであって、ライトカーテン30A〜30Fの物体を検出したという検出結果を受信したとき、クレーン10の速度を制御する制御手段と、ライトカーテン30A〜30Fとクレーン10との間の距離に応じて、ライトカーテン30A〜30Fの検出結果を前記制御手段に送信するか否かを判定する判定手段とを備える。
(もっと読む)
搬送システム、搬送車管理装置、および搬送制御方法
【課題】搬送回数の変化に応じて搬送時間を最適化することが可能な搬送システムを提供すること。
【解決手段】第1の軌道を走行して搬送物を搬送する複数の無人搬送車と、第1の軌道に通じ、複数の無人搬送車が待機するための第2の軌道と、搬送制御装置と、搬送車管理装置と、を具備し、複数の無人搬送車は、搬送制御装置の制御に基づいて搬送物を搬送すると、搬送完了情報を搬送制御装置へ送信し、搬送制御装置は、搬送完了情報を受信すると、搬送時間を算出し、搬送実施情報を搬送車管理装置へ送信する第1の制御部を有し、搬送車管理装置は、搬送実施情報の一覧を示す履歴データを格納する記憶部と、搬送実施情報を受信すると記憶部に格納させ、履歴データを用いて搬送回数の合計値および搬送時間の平均値をそれぞれ算出し、合計値および平均値に応じて第1の軌道を走行する無人搬送車の台数を、搬送制御装置を通じて制御する第2の制御部と、を有する。
(もっと読む)
車両の位置を決定する方法および装置、コンピュータプログラムおよびコンピュータプログラム製品
【課題】本発明は、経路に沿って移動する車両の位置を決定するための装置および方法に関連する。
【解決手段】この経路に沿ってマーカ、特にコードキャリアまたはバーコードが配置されている。この方法は、車両に搭載されたデジタルカメラによってマーカが検出され、デジタルカメラの検出範囲またはカバー範囲内にある少なくとも一つのマーカ像の位置の画像処理から、一つの所定のマーカまたは複数の所定のマーカに対する、経路に沿った車両の主移動方向および主移動方向に対して直角をなす少なくとも一つの方向における車両の相対位置が決定されることを特徴とする。本発明はまた、コンピュータプログラムおよびコンピュータプログラム製品に関する。
(もっと読む)
移動体システム
【構成】 移動体A,Bの移動経路に沿ってリニアセンサL1〜L4,R1〜R4を2列に間隔を置いて配置し、移動体A,Bに設けた磁石のリニアセンサに対する相対位置を求める。求めた相対位置にリニアセンサの原点座標を加算し、移動体の絶対位置を求める。
【効果】 移動体の絶対位置を地上側で迅速かつ高精度に検出できる。
(もっと読む)
搬送装置
【課題】テーブルに載置された被搬送物の落下や荷崩れを防止しながら、短時間で台車を移動させることができる搬送装置を提供する。
【解決手段】速度パラメータ演算部45は、予め入力された傾斜角加速度αωの制限値に基づいて速度パラメータを演算し、傾斜制御部46は、速度パラメータ及び傾斜角加速度αωに基づいてテーブル25の傾斜制御を行う。走行制御部48は、傾斜制御部46から与えられるテーブル25の傾斜角θ及び速度パラメータに基づいて、テーブル25に載置された荷物24に作用する走行加速度α(α=G・tanθ)と重力加速度Gとの合力ベクトルをテーブル25に対して垂直に作用させるようにスタッカクレーンの走行を制御する。
(もっと読む)
走行システムと、これに用いられる移動装置、記憶媒体及びデータ構造
【課題】ステーションが多数である場合等でも、移動装置の記憶容量を大幅に小さくでき、新たなステーションを追加した場合等に、容易に対応できるようにする。
【解決手段】走行ライン5上の所定の基準位置の近傍には、記憶媒体7a〜7hが設けられる。各記憶媒体には、各ステーション3a〜3eについてのステーション情報が記憶されている。該ステーション情報は、各ステーションへ移動するためには、基準位置からどの方向に進むべきかについての情報である。移動装置11は、いずれのステーションへ行くべきかを示す目的地情報が入力可能であるとともに、基準位置に移動装置11が位置する時に記憶媒体からステーション情報を読み取り可能な読取装置15と、目的地情報とステーション情報とに基づいて移動装置の進行方向を制御する制御装置17と、を有する。
(もっと読む)
移動体システム
【構成】 移動体2の走行方向に平行に2列に磁気マーク21,22を配置し、2個のリニアセンサ16,17で各磁気マーク21,22を基準とする絶対位置を求める。各磁気マーク21,22の中心の原点基準の絶対位置を記憶し、検出する磁気マークを切り替えながら、移動体2の絶対位置を求める。
【効果】 離散的に配置した磁気マークで、移動体の絶対位置を連続的に検出できる。
(もっと読む)
移動体設備
【課題】移動体同士の衝突を簡素な構成により回避することができる移動体設備を提供すること。
【解決手段】複数の移動体3a,3bの夫々に、走行駆動手段SM1,AMP1,SM2,AMP2の駆動量を検出する駆動量検出手段RE1,RE2が設けられ、移動体同士の車間を監視する車間監視用制御手段Wが、移動体の夫々について、駆動量検出手段にて検出される駆動量情報C1,C2に基づいて得られる予測走行移動量と、走行位置検出手段DET1,DET2にて検出される走行位置情報D1,D2に基づいて得られる実走行移動量との対応関係により走行位置情報が適正であるか否かを判別し、適正であると判別された複数の移動体についての適正走行位置情報に基づいて、移動体同士の間隔が予め設定された許容間隔以上離れているか否かを判別し、移動体同士の間隔が許容間隔以上離れていないと判別した場合には、全ての移動体の走行を停止させるように構成されている移動体設備を構成した。
(もっと読む)
位置決め制御装置
【課題】エンコーダのプリセットに要する時間を大幅に短縮することができ、位置決めデータの記憶容量が制限されることが無い位置決め制御装置を提供する。
【解決手段】本発明にかかる位置決め制御装置20は、移動体を駆動するサーボモータ13と、サーボモータ13の回転量を検出するインクリメンタル型のエンコーダ21と、位置決め制御信号とエンコーダ21からの検出信号を受けてサーボモータ13を駆動制御するサーボドライバ22と、直線軌道における移動体の位置を計測するレーザ距離計23と、移動体の位置決めデータを記憶していてサーボドライバ22に位置決め制御信号を出力する制御装置16と、を備え、制御装置16は、電源投入後、移動体の位置決め制御動作に先立って、レーザ距離計23からの計測データを用いてエンコーダ21をプリセットする。
(もっと読む)
搬送装置の設備監視方法
【課題】搬送システムの実稼動中に走行時の加速度を計測することで早期に異常箇所を特定し、搬送システムの停止や事故を未然に防ぐようにした搬送装置の設備監視方法を提供すること。
【解決手段】搬送車2が走行レール1上を走行する搬送装置において、x軸、y軸、z軸の3軸方向を独立して計測する2組の加速度センサS1、S2を搬送車2に設置し、搬送車2が走行する際の加速度センサS1、S2の各軸ごとの加速度を計測し、計測値に基づいて設備の状態を判断する。
(もっと読む)
物品搬送設備
【課題】搬送能力の向上を図ることができる物品搬送設備の提供。
【解決手段】複数の物品移載箇所1を経由するように設置される有端形式の軌道2上を走行する複数台の物品搬送台車3と、それら複数台の物品搬送台車3の走行を管理する制御手段とが設けられ、制御手段は、複数の物品移載箇所1のうちの同一の物品移載箇所1を搬送元の物品移載箇所とする搬送要求情報が複数生じている複数要求状態であると、複数台の物品搬送台車3を搬送処理用の物品搬送台車として選択する形態で、複数台の物品搬送台車のうちから搬送処理用の物品搬送台車を選択する複数台選択モードを実行して、その選択した搬送処理用の物品搬送台車にて搬送元の物品移載箇所から搬送先の物品移載箇所に物品20a,20bを搬送すべく、物品搬送台車3の走行を管理するように構成されている。
(もっと読む)
物品搬送設備
【課題】 運転制御手段と物品搬送車との間での通信および複数の物品搬送車の隣接するものどうしの間での通信が行えないようになるのを回避する物品搬送設備の提供。
【解決手段】 運転管理用の通信手段Tとして、運転制御手段14と物品搬送車3との間での通信および複数の物品搬送車3の隣接するものどうしの間での通信を空間光伝送方式により行う光式通信手段17、および、運転制御手段14と物品搬送車3との間での通信および複数の物品搬送車3の隣接するものどうしの間での通信を電磁波伝送方式により行う無線通信手段18が、並行して通信作動を行うように設けられ、運転制御手段14および車体制御手段Hが、光式通信手段17による通信情報を優先使用し、かつ、光式通信手段17による通信情報が得られないときには無線通信手段18の通信情報を使用するように構成されている。
(もっと読む)
ずれ量検出装置
【課題】床上を走行する移動体において、予め決められた経路に対する移動体の移動方向のずれを検出する。
【解決手段】床面に位置情報発信体が配設された室内を、予め決められた移動経路に沿って移動する移動体に搭載されるずれ量検出装置において、位置検出用交信範囲に存在する前記位置情報発信体から取得した位置情報から前記移動体の現在位置を検出する第1の現在位置検出手段と、位置検出用交信範囲を包含するずれ検出用交信範囲に存在する前記位置情報発信体の取得した位置情報から前記移動体の現在位置を検出する第2の現在位置検出手段と、検出された現在位置を移動経路と照合し前記移動体の移動方向を特定する移動方向特定手段と、前記各現在位置検出手段により検出された各現在位置から移動方向に対するずれ量を検出するずれ量検出手段と、を備える。
(もっと読む)
移動体の走行制御装置
【課題】 スリップを起こさない範囲でできるだけ動作時間を短くできる移動体の走行制御装置を提供する。
【解決手段】 高さ位置を可変可能に設置された昇降台101と、移動方向の前後にそれぞれ形成された各車輪7、8と、各車輪7、8をそれぞれ駆動する各モータ5、6とを備えた移動体100を所定の路面102上に各車輪7、8を各モータ5、6にて駆動させて移動する走行の制御を行う移動体100の走行制御装置10において、昇降台101の高さの位置情報と各モータのトルク特性情報と路面102の摩擦特性情報と移動体100の構造上の固有値とを用いて移動体の指令曲線、各モータのトルク制限のパラメータを算出する指令・トルク制限パラメータ算出手段1と、算出された指令曲線、トルク制限のパラメータに基づいて各モータ5、6への指令値、トルク制限値を生成する指令値・トルク制限値生成手段2とを備える。
(もっと読む)
1 - 20 / 20
[ Back to top ]