
Fターム[5H301CC02]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 制御変量、指令内容 (1,997) | 移動体自体の位置、進路 (1,814) | 位置 (942)
Fターム[5H301CC02]の下位に属するFターム
Fターム[5H301CC02]に分類される特許
1 - 20 / 26
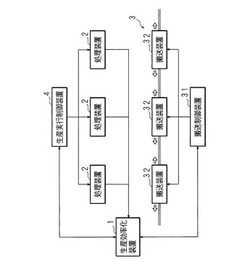
生産効率化装置、生産効率化方法、コンピュータプログラム
【課題】被処理体に対する処理効率を向上させることができる生産効率化装置を提供する。
【解決手段】被処理体を処理する複数の処理装置2との間で情報を通信する第1通信手段と、前記複数の処理装置2間で被処理体を搬送する搬送装置32を有する搬送システム3との間で、該搬送装置32の制御に関わる制御情報を通信する第2通信手段と、前記第1通信手段にて通信した情報に基づいて、該情報の通信先の処理装置2が処理済の被処理体に対する搬出および未処理の処理体の搬入を要する搬送時機を予測する手段と、該手段が予測した搬送時機に前記情報の通信先の処理装置2へ前記搬送装置32が到着するように前記搬送システムへの制御情報を生成する生成手段とを生産効率化装置1に備える。
(もっと読む)
搬送システム、および、台車割り付け方法

【課題】搬送システムにおいて自走式台車に搭載されるバッテリーの寿命を維持する。
【解決手段】バッテリー115を搭載し荷物を搬送する自走式の台車101と、充電ステーションと、管理手段とを備える搬送システムであって、バッテリー115の放電量を示す情報である放電量情報を作成する放電量作成部116と、バッテリー115に許容される放電量を示す情報である残量情報を放電量情報に基づき作成する残量作成部117と、要求される仕事に含まれる目的地の位置を示す情報である目的地情報と台車101の位置を示す情報である現在地情報とに基づき、要求される仕事に必要な放電量を示す情報である必要量情報を作成する必要量作成部と、残量情報から必要量情報を減じて得られる差が第一閾値を上回る場合、要求される仕事を台車101に割り付ける割付部とを備える。
(もっと読む)
走行台車システムとその自己診断方法
【課題】
移動体システムでのトラブルの発生を予防する。
【構成】
複数の走行台車が地上側コントローラの指示により走行経路に沿って走行するシステムを自己診断する。地上側コントローラは、走行経路上の位置を一意に特定する絶対座標により、異常検出用センサによる検出を行う位置を走行台車に指定し、走行台車は、指定された位置で異常検出用センサによる検出を行い、検出位置と検出時刻を含む検出データを地上側コントローラへ報告する。
(もっと読む)
移動ロボット
【課題】安全性向上のための近接センサを走行制御にも用いて移動ロボットの使い勝手を向上させる。
【解決手段】移動ロボットの本体を移動する移動機構と、複数の方向から移動機構に接近する物体を検知する近接センサと、近接センサの信号により、移動機構を制御する制御部と、を備え、移動ロボットが待機状態にあり、かつ、近接センサが移動ロボットの進行方向と異なる方向の物体を検知したとき、制御部が進行方向に移動機構を移動させる。
(もっと読む)
移動体システム
【課題】 移動体の位置を連続的に監視しながら、移動体を駆動するリニアモータの1次側を連続的に制御する。
【構成】 リニアモータの2次側部材を備えた複数の移動体と、移動体の移動経路に沿って2次側部材の長さ以下のピッチで複数設けられたリニアモータの1次側部材とを設ける。移動体の位置を検出するセンサを2次側部材の長さ以下のピッチで設けると共に、センサからの位置信号により1次側部材を制御するコントローラを設ける。
(もっと読む)
自律移動装置による荷物の受け渡し方法
【課題】自律移動装置による荷物の受け渡し方法において、簡単な構成により、作業台を床面等に常時固定していなくても荷物の受け渡しを確実に実現可能とする。
【解決手段】自律移動装置1は、作業台2の位置を認識して所定位置まで接近した状態で作業台2に力を及ぼすことにより作業台2を動かないように固定し、その後に作業台2との間で荷物3の受け渡しまたは受け取りを行なう。作業台2として既存の机などを用いることができる。台固定機構4は、人の腕に類似の2関節アーム機構であり、不図示の駆動機構から第2アーム42に伝達される動力によって作業台2の荷物載置面21を下方に押さえつける。これにより、作業台2と自律移動装置1との相対位置が固定される。作業台2をアンカー等によって床面等に常時固定していなくても荷物3の受け渡しを確実に実現でき、作業台2の配置変更を容易に実施できる。
(もっと読む)
給紙無人搬送車システム
【課題】無人搬送車に搭載される載荷用テーブルに必要とされるスライドストロークを短縮し、無人搬送車のコンパクト化を実現する給紙無人搬送車システムを提供する。
【解決手段】輪転機と輪転機に対して新聞巻取紙を装着・回収する無人搬送車とを有する給紙無人搬送車システムにおいて、輪転機の給紙エリアに無人搬送車を誘導する誘導ラインが、一つの輪転機に対して複数設けられていることにより上記の課題を解決する。
(もっと読む)
自律移動装置
【課題】自律移動する際に、より少ない検出器で全方位の接触又は衝突を検知することが可能な自律移動装置を提供する。
【解決手段】自律移動装置3は、台車40と、カバー41と、第1近接スイッチ及び第2近接スイッチと、電子制御装置32と、を備える。カバー41は、台車40の側面の一部を覆い、かつ、台車40に対して相対変位可能に該台車40に取り付けられる。第1近接スイッチは、台車40に対してカバー41が所定値変位したときにオン/オフする検出信号を出力し、台車40の中心部に配置される。第2近接スイッチは、第1近接スイッチがオン状態からオフ状態に切り換わる変位量よりも大きくカバー41が変位した場合にオン状態からオフ状態に切り換わるように設定されている。電子制御装置32は、第1近接スイッチ及び第2近接スイッチから出力されるそれぞれの検出信号に応じて前記駆動手段を制御する。
(もっと読む)
移動体教示システム
【課題】 移動体を動かす事なく目標位置情報の教示が可能であり、また教示者が教示と同時に目標位置情報の確認および編集を容易に行う。
【解決手段】 教示装置は、ランドマークを計測するランドマーク計測部と、ランドマークの計測結果から環境内での教示装置位置を算出する位置算出部と、教示装置位置を教示者に提示する位置提示部と、教示装置位置を移動体の目標位置として編集する位置編集部と、位置編集部で編集された目標位置を記憶する位置記憶部と、位置記憶部に記憶された目標位置を移動体に送信する位置送信部とを備え、移動体は、位置送信部から送られた目標位置を受信する位置受信部と、位置送信部から送られた目標位置を受信する位置受信部と、位置受信部にて受信した目標位置に従って移動を実行する移動実行部とを備える。
(もっと読む)
自律移動装置用の地図生成システムおよび地図生成方法
【課題】自律移動装置用の地図生成システムおよび地図生成方法において、ループ状の移動経路に沿う稼動領域に対しても容易に精度良く各部分領域の地図を整合させた地図を生成可能とする。
【解決手段】地図生成システム1は、入力手段2と、記憶手段3と、地図情報を編集して移動用地図を生成する地図情報編集手段4とを備え、移動用地図は、自律移動装置の稼動領域を構成する複数の部分領域毎に設定された少なくとも1つの特徴点を有する部分地図の集合として生成され、各部分地図が、実測によるそれぞれの特徴点の相互の位置関係に基づいて相互の配置を決定されて記憶手段3に記憶され、各特徴点間の配置を決定する拘束条件が、記憶手段3に記憶されることにより、地図情報編集手段4は、拘束条件を用いて特徴点間の相対的な位置関係を更新し、更新された位置関係によって部分地図を相互に結合した移動用地図を生成する。
(もっと読む)
経路計画装置、経路計画方法及び移動体
【課題】ロボット等の移動体に搭載した際には、自然な移動動作を表出させることができる経路計画装置、経路計画方法、及び経路計画装置を搭載した移動体を提供すること。
【解決手段】経路計画装置20は、ロボットの片側又は両側に、移動経路生成を補助する第1移動禁止領域を設定する経路ガイド領域設定部21と、経路ガイド領域内をロボットが移動しないように目標位置までの経路を決定する経路決定部25とを有する。経路ガイド領域設定部21は、その外周が当該ロボット中心を通るよう経路ガイド領域を設定する。
(もっと読む)
移動装置
【課題】移動装置において、移動障害物が存在する環境下においても高速な移動を可能とすること。
【解決手段】移動装置は、外界情報取得手段31、障害物検出手段32、障害物特徴推定手段33、衝突予測手段34、回避経路計画手段35、回避軌道生成手段36を備える。衝突予測手段34は、障害物の位置および特徴と移動装置の姿勢情報および軌道情報とから当該障害物との衝突予測をする。回避経路計画手段35は、衝突が予測された場合、障害物を回避するための障害物の左右もしくは障害物の周囲を通過する経由点を算出し、経由点を通る1つまたは複数の回避経路を計画する。回避軌道生成手段36は、障害物と干渉することのないように経由点を調整し、かつ移動装置が走行可能な滑らかな回避軌道を生成する。
(もっと読む)
搬送設備安全装置及び搬送設備安全動作方法
【課題】安全のための作業負荷を掛けることなく、設備停止時間も長くならないようにして、搬送設備の安全性を高めることができる搬送設備安全装置を得る。
【解決手段】搬送設備1の近傍を、侵入検知を行うエリア2と、侵入検知を行わないエリア3に分け、侵入検知を行うエリア2をカバーするようにRFIDアンテナ4を配置し、このRFIDアンテナ4が人6に取り付けられたRFID5を検知したときは、RFIDコントローラにより、搬送設備1を非常停止させるかどうかを判定し、この判定結果を、搬送設備1を制御する制御盤に出力するようにして、侵入検知を行うエリア2内に人が侵入したときは搬送設備1を停止するようにした。
(もっと読む)
工場内線路合流点近傍での台車接触事故防止装置
【課題】製鉄所などの工場内線路の本線から側線への合流点近傍における台車の接触事故を、確実かつ低コストで防止できる装置を提供する。
【解決手段】本線Aから線路を分岐させて側線Bへ合流させるための転てつ器1と、分岐点Dより後方の本線A近傍に設けられ、本線B上を走行中の台車F上から手動操作することにより転てつ器1を転換させる転てつ梃子2と、合流点Dより後方の側線B上または側線B近傍に設けられ、合流点Dに向かう台車Gの通過により、転てつ器1を線路分岐なしの状態に転換するとともに、その状態で鎖錠する転てつ器鎖錠スイッチ3と、合流点Dより前方の側線B上の台車同時立入禁止区域Hに台車Gが在線しているとき、転てつ器1を線路分岐なしの状態で鎖錠する転てつ器鎖錠回路4と、分岐点D近傍であるが台車F上からは手動操作できない位置に設けられ、前記鎖錠を解除する手動の転てつ器鎖錠解除ボタン5と、を備えた工場内線路合流点近傍での台車接触事故防止装置。
(もっと読む)
騒音低減装置
【課題】移動可能で遮音性能が高く、道路工事等に適した騒音低減装置を提供する。
【解決手段】騒音低減装置1は、車輪2を備えたベースフレーム3上に遮音壁4を搭載し、その一面に収音マイク5を配置し、他の面にスピーカを取付けている。ベースフレームにはアクティブ騒音制御回路及び増幅器と電源部、走行モータを内蔵している。任意の台数の騒音低減装置を連結してアスファルトフィニッシャ11の側方に配置し、アスファルトフィニッシャの進行に同期させて走行させる。アスファルトフィニッシャが生じる騒音は、収音マイクにて収音され、騒音とは逆位相の音響がスピーカから放射されて、アスファルトフィニッシャの側方へ伝播する騒音が低減される。
(もっと読む)
命令入力装置及び命令入力方法
【課題】本発明は、簡易な入力操作で入力命令を入力させる。
【解決手段】本発明は、楕円体状筐体2が押されて移動したとき、当該楕円体状筐体2の移動距離を検出し、当該検出した移動距離に応じて入力命令の入力の有無を判別するようにして、かかる入力命令が入力されたと判別すると、当該入力された入力命令に応じた処理を実行することにより、入力命令を入力するために楕円体状筐体2を持ち上げさせた状態で振り動かすような煩雑な入力操作を何ら行わせることなく、当該楕円体状筐体2を押させて移動させるだけで入力命令を入力させることができ、かくして簡易な操作で入力命令を入力させることができる。
(もっと読む)
搬送システム
【構成】 処理装置群Aのロードポート24を次の搬送先とする際に、その直上流側のエリアのバッファ群32−1,次に上流側のエリアのバッファ群32−2の順となる頻度で、直上流側を優先して上流側からバッファを割付ける。
【効果】 物品の次の処理先となるエリアの渋滞を防止する。
(もっと読む)
搬送装置の設備監視方法
【課題】搬送システムの実稼動中に走行時の加速度を計測することで早期に異常箇所を特定し、搬送システムの停止や事故を未然に防ぐようにした搬送装置の設備監視方法を提供すること。
【解決手段】搬送車2が走行レール1上を走行する搬送装置において、x軸、y軸、z軸の3軸方向を独立して計測する2組の加速度センサS1、S2を搬送車2に設置し、搬送車2が走行する際の加速度センサS1、S2の各軸ごとの加速度を計測し、計測値に基づいて設備の状態を判断する。
(もっと読む)
追尾システム
【課題】追尾対象を限定することなく、かつ方向あるいは距離について広範囲に適用することのできる追尾システムを提供する。
【解決手段】第1の移動体に設けられた移動速度伝送装置1と、第1の移動体を追尾する第2の移動体に設けられた追尾装置2とを備え、移動速度伝送装置1は、第1の移動体の加速度を検出する加速度センサ3と、加速度に対して所定の処理を行い送信信号として出力する情報処理部4と、送信信号を無線電波5として送信する送信部6とを有し、追尾装置2は、無線電波5を受信して受信信号として出力する受信部7と、受信信号に基づいて第1の移動体に対する追尾速度を制御する制御部8とを有するものである。
(もっと読む)
無人搬送車の車輪磨耗量の推定方法と車輪交換時期の判定方法、及び、無人搬送車の走行制御方法とその装置。
【課題】 無人搬送車の車輪の磨耗を適切に把握してその走行状態を制御するとともに、車輪の交換時期を適正に判定する方法を提供する。
【解決手段】 無人搬送車10の経路の直進区間内に所定の距離の計測区間を設けて、上記無人搬送車10が上記計測区間を一定の速度で走行したときの車輪12の回転数をエンコーダ14で計測する操作を、上記無人搬送車10が計測区間をN回通過するまで繰り返し、各回ごとに計測したパルス数Piの平均値Pを算出し、この平均値Pと上計測区間の実際の距離をYとから、単位パルス当たりに車輪12の進む実際の距離Xを算出し、このXが予め設定された交換時期の車輪径Rcと上記平均値Pとから求められる単位パルス当たりの交換時期距離Z以下になった場合には車輪交換時期であると判定するようにした。
(もっと読む)
1 - 20 / 26
[ Back to top ]