
Fターム[5H301GG01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 誘導経路検出用撮像手段 (38)
Fターム[5H301GG01]に分類される特許
1 - 20 / 38
無人走行体の遠隔操縦システム
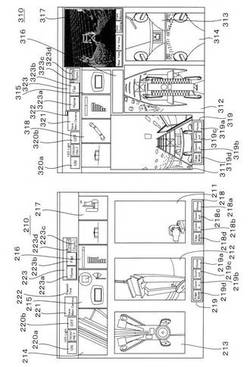
【課題】往路走行モード選択時における遠隔操縦装置の操作感と、復路走行モード選択時における遠隔操縦装置の操作感とを共通化し、無人走行体の遠隔操縦性を高める。
【解決手段】手持ちコントローラ205,305に、無人走行体4,5の走行モードを往路走行モード又は復路走行モードに切り換える前後進切換スイッチ410,411と、無人走行体4,5の走行方向を指示するジョイスティック408を備える。無人走行体の走行モードを往路走行モードから復路走行モードに切り換えたとき、表示装置202,302の第1表示部211,311に表示される映像を、往路前方撮影カメラの撮影映像から復路前方撮影カメラの撮影映像へと切り換える。また、往路走行モードへの切換時と復路走行モードへの切換時とで、手持ちコントローラ205,305の操作内容に応じた無人走行体4,5の動作を同一に保つ。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】無人走行体の遠隔操縦を過不足なく行うことができ、かつ無人走行体の誤操作を確実に防止可能な遠隔操縦装置を備えた無人走行体の遠隔操縦システムを提供する。
【解決手段】オペレータが操作する遠隔操縦装置として、タッチパネル203,303と手持ちコントローラ205,305の双方を備える。これらの各遠隔操縦装置によって共通に行える無人走行体の操作と、タッチパネル203,303によってのみ行える無人走行体4,5の操作と、手持ちコントローラ205,305によってのみ行える無人走行体の操作とを設定する。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2Aと、該誘導ライン2Aに沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1Aであって、誘導ライン2Aは、異なる色で着色された複数の着色領域2a、2bを有し、無人搬送車3は、誘導ライン2Aを含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおける着色領域2a、2b間の境界線の数に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部7と、境界線の数と走行速度との関係があらかじめ格納された記憶部6とを有することを特徴とする。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】誘導ライン2Dと、無人搬送車とを備えた無人搬送システムであって、誘導ライン2Dは、異なる3つの色が順繰りに現れるように着色された3種類の着色領域2a、2b、2cを有し、無人搬送車は、撮像手段と、着色領域2a、2b、2cの色に基づいて目標速度を設定する目標速度設定部と、走行制御部と、3種類の着色領域2a、2b、2cの色の順番に基づいて走行方向を特定する走行方向特定部と、着色領域2a、2b、2cの色と走行速度との関係および3種類の着色領域2a、2b、2cの色の順番と走行方向との関係があらかじめ格納されており、かつ着色領域の色の履歴が格納される記憶部と、を有することを特徴とする。
(もっと読む)
無人車両および無人搬送システム
【課題】撮像手段が2つだけであっても姿勢角を修正しながら全方向に走行可能な無人車両および該無人車両を備えた無人搬送システムを提供する。
【解決手段】無人車両10は、それぞれ領域A1、A2の画像データを出力する2つの撮像手段11a、11bと、画像データに基づいて姿勢角を算出する姿勢角算出部と、姿勢角がゼロになるように車輪15の操舵角を制御する操舵制御部とを備える。姿勢角算出部は、第1方向に走行する際は、2つの撮像手段11a、11bから出力される2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出し、第2方向に走行する際は、1つの撮像手段11aから出力される1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出するか、または2つの撮像手段11a、11bから出力される2つの画像データにおけるマーカの位置に基づいて姿勢角を算出する。
(もっと読む)
無人搬送車の誘導ライン撮像装置、および無人搬送車
【課題】白とびのない画像データを生成することができる誘導ライン撮像装置、および該装置を備えた無人搬送車を提供する。
【解決手段】本発明に係る誘導ライン撮像装置1Aは、路面10に敷設された誘導ライン11に沿って走行する無人搬送車に備えられており、誘導ライン11を含む撮像領域Aを撮像面3で撮像して画像データを生成する撮像手段2と、撮像領域Aを照射面5から照射した光によって照らす照明手段4とを備え、照明手段4の照射面5が、撮像領域Aの外縁と撮像手段2とを結ぶ線L1を路面10において等角に反射させた線L2で区分けされた外側の領域に配置され、撮像手段2の撮像面3が、照明手段4によって直接的に照らされることのない位置に配置されている。
(もっと読む)
移動体システム
【課題】距離センサを用いて移動体を精度良く自律走行させるとともにより省スペース化できるようにした、移動体システムを提供する。
【解決手段】移動体1に取り付けられ、所定の探索範囲に検出用光を走査して移動体と探索範囲内に存在する物体までの距離及び方向を検出する距離方向検出装置7と、平板標識20の設置される位置を含む走行経路の地図情報を記憶する地図情報記憶手段と、距離方向検出装置の検出結果と地図情報記憶手段に記憶された地図情報とを照合して移動体の進行方向を決定する進行方向決定手段と、を有する移動体システムであって平板標識20に検出用光を拡散反射させる拡散反射面と検出用光を鏡面反射させる鏡面加工面とを設けて構成する。
(もっと読む)
走行制御装置
【課題】車両を目標位置まで走行経路に沿って自律走行させる場合に、車両を目標位置に精度良く到着させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100は、駐車予定エリアPKに車両1が到着するより前に、撮像エリアKFを第3カメラ26cにより撮像し、画像解析を行って目標とする駐車位置O’を再認識し、現在の車両1の車両位置などを補正して、既存の走行経路RT1〜RT3に沿って車両1を走行させる。走行経路を再生成すると、走行距離の長い走行経路が生成されるおそれがあるため、既存の走行経路RT1〜RT3に沿って車両1を走行させることで、走行距離が延びることを抑制でき、車両1が位置ずれを起こすことを抑制できる。よって、車両1が走行経路RT1〜RT3から外れることを抑制できるので、車両1を目標とする駐車位置O’に精度良く駐車させることができる。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】目標に対して精度よく光波を照射し得る。
【解決手段】実施形態によれば、照射部にて移動目標に対し光波を照射し、光波の反射光を撮像部にて受光して撮像視野内の移動目標に関する画像情報を得て、この画像情報に基づいて駆動部にて光波の照射方向と移動目標からの光波の反射方向とを一致させるべく照射部及び撮像部を駆動して移動目標を追跡する目標追跡装置において、照射部から光波の照射方向に対応する照射部の姿勢情報を取得する取得手段と、この取得手段で得られた姿勢情報と、撮像部で得られる画像情報とに基づいて光波の照射方向と撮像部の指向方向との間の偏向角誤差を算出する演算手段と、この演算手段で求められた偏向角誤差に基づいて、光波の照射方向と撮像部の指向方向との間の偏向角を補正すべく駆動部を制御する制御手段とを備えた目標追跡装置を提供する。
(もっと読む)
バッテリー容量推定装置、その方法及びプログラム
【課題】移動経路で消費されるバッテリー容量を高精度に推定できるバッテリー容量推定装置、その方法及びプログラムを提供すること。
【解決手段】バッテリー容量推定装置は、地図情報を記憶する記憶手段と、地図情報における障害物の混雑の度合いを示す混雑度に基づいて、地図情報に対して安全率を設定する安全率設定手段と、記憶手段に記憶された地図情報において、現在位置から目的位置までの移動経路を算出する移動経路算出手段と、移動経路算出手段により算出された移動経路と、安全率設定手段により設定された地図情報の安全率と、に基づいて、移動経路で消費されるバッテリー容量を推定する容量推定手段と、を備えている。
(もっと読む)
移動経路計画装置、移動体制御装置及び移動体
【課題】移動体の経路計画効率の向上を図ることが可能な移動経路計画装置を提供する。
【解決手段】移動体の進行方向を撮影する撮影手段と、前記撮影手段から得られる撮影画像を基に所定の画像処理を行うことにより、前記撮影画像に存在する通行痕跡を検出する画像処理手段と、前記画像処理手段によって検出された通行痕跡を基に前記移動体の移動経路を計画する経路計画手段とを備える。
(もっと読む)
移動体及び移動体の制御方法並びに移動体システム
【課題】教示作業にかかる労力を低減するとともに移動体を走行経路に沿って精度良く走行させることができるようにした、移動体及び移動体の制御方法並びに移動体システムを提供する。
【解決手段】予め走行経路に沿って配設されたガイドライン104を検出するガイドラインセンサ4と、車体2の進行方向を撮像するカメラ4と、車体2の駆動装置3と、駆動装置3を制御する制御装置5とを有し、制御装置5を、ガイドラインセンサ104に基づいて駆動装置3を制御する教示走行を実行する教示走行制御部7と、教示走行実行時に、複数の教示地点のそれぞれにおいてカメラ4を動作させて教示画像を取得する教示画像取得部6と、教示画像を記憶する画像記憶部9と、
教示画像と取得画像との比較結果に基づいて駆動装置を制御する再生走行制御部8とを有して構成する。
(もっと読む)
無人飛行物体を着陸させるために、プラットフォーム、特に海軍プラットフォームへの接近段階の間、無人飛行物体を誘導するシステム
本発明は、無人飛行物体を着陸させるために、プラットフォーム、特に海軍プラットフォーム(1)への接近段階の間、無人飛行物体を誘導するシステムにおいて、前記プラットフォームは、水平面からの所定の角度区域にわたって光誘導ビームの配列(2)を放射する滑空角指示装置を備えるとともに、前記無人飛行物体に前記誘導ビームを追従させるために、前記無人飛行物体は、画像解析手段(7)と、前記無人飛行物体の自動操縦手段(9)に指令するための命令の演算手段(8)とに接続されたビーム捕捉カメラ(6)を備えることを特徴とする。  (もっと読む)
(もっと読む)
自律走行車の走行システム
【課題】安定した信頼性の高い走行制御が確保できると共に、作業環境の清浄度が良好に維持できる自律走行車の走行システムを提供する。
【解決手段】自律走行車31の車体に取り付けられてテープ25a〜25eが付された天井部22を撮影する撮影部38と、床面21に埋め込まれた複数の磁気ピン30による磁気マーカライン26A、26B〜29A、29Bを検出する磁気センサ36、37とを備え、撮影部38によって撮影された画像データに基づいて床面21上を走行せしめると共に、磁気センサ36、37の磁気マーカライン26A、26B〜29A、29B検出に基づいて制動停止せしめる。塵埃等による作業環境の清浄度を悪化することなく、信頼性の高い走行制御が確保できる。また、磁気センサ36、37により高精度で磁気マーカライン26A、26B〜29A、29Bが検知でき高精度で制動停止ができる。
(もっと読む)
自動運転車および自動運転車運行システム
【課題】 運行アルゴリズムが簡易で使いやすい。経路設定,変更が容易でシステム設定,維持及び管理が容易。運行エラー防止。交差点競合防止。
【解決手段】 自走機構22〜27を備える車体2;路面上案内線条1を撮影する装置4;撮影画面の線条像の位置および姿勢を検出する手段9;該位置および姿勢に対応して、案内線条に沿って走行するように自走機構を操作する運転手段9,29;案内線条に付加したコード標識の画面上の像を認識して識別コードを検出する標識検出手段9;および、運行経路上の通行点及び分岐点を識別コードで表しそこでの運行指示(アクション)を該識別コードに付した地点情報(セル内データ)の群でなる運行予定表(Excelのbook)を保持し、標識検出手段が検出した識別コードを運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、運転手段を制御する運転制御手段9;を備える。
(もっと読む)
移動体
【課題】 移動体を走行経路直線部に正確に沿って移動させる。
【解決手段】 撮像手段を備え、前記撮像手段の撮像画像に基づいて走行経路直線部を走行制御される自律走行が可能な移動体において、前記制御部は、進行方向に向けて設置した移動体上の撮像手段で撮像した移動体識別マーク、走行経路識別マーク又は鏡面識別用マークから求まる鏡面上の移動体の位置から、移動体の横方向のズレおよび姿勢角を求めて移動体を走行制御する。
(もっと読む)
移動体教示システム
【課題】 移動体を動かす事なく目標位置情報の教示が可能であり、また教示者が教示と同時に目標位置情報の確認および編集を容易に行う。
【解決手段】 教示装置は、ランドマークを計測するランドマーク計測部と、ランドマークの計測結果から環境内での教示装置位置を算出する位置算出部と、教示装置位置を教示者に提示する位置提示部と、教示装置位置を移動体の目標位置として編集する位置編集部と、位置編集部で編集された目標位置を記憶する位置記憶部と、位置記憶部に記憶された目標位置を移動体に送信する位置送信部とを備え、移動体は、位置送信部から送られた目標位置を受信する位置受信部と、位置送信部から送られた目標位置を受信する位置受信部と、位置受信部にて受信した目標位置に従って移動を実行する移動実行部とを備える。
(もっと読む)
ペット誘導ロボットおよびペット誘導方法
【課題】人間が付き添うことなくペットの誘導を行うペット誘導ロボットを提供すること。
【解決手段】移動可能なロボット本体部11とペット装着部12およびリード13とからなるペット誘導ロボット10であって、周囲の情報を収集する外部情報収集手段21で得た情報から周囲状況を推定する外部環境認識手段22と、前記リードの張力と長さを収集するリード状態収集手段23と、前記外部環境認識手段22とリード状態収集手段23からペットの運動状況を推定するペット状況推定手段24と、ペットの目標経路を格納する経路情報記憶手段25と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段26と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段27と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段29とを備える。
(もっと読む)
自律移動型ロボットの特定位置誘導制御方法
【課題】本発明は、自律移動型ロボットが滑らかな動作で任意の場所に、任意の方向から任意の向きで進入することができる自律移動型ロボットの特定位置誘導制御方法を提供することを目的とする。
【解決手段】自律移動型ロボットの特定位置誘導制御方法であって、自律移動型ロボットを移動させる移動ステップと、自律移動型ロボットの周囲の状況を撮影する撮像ステップと、特定位置の上方に設けられたマーカを抽出するマーカ抽出ステップと、撮像ステップにて撮影された撮像画像をもとに前記特定位置の方向を算出する方向算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の間の距離を算出する距離算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の該ロボット進入する姿勢方向を算出する姿勢方向算出ステップと、を有しており、自律移動型ロボットを前記特定位置の特定の方向から進入させることを特徴とする。
(もっと読む)
ファジィ制御装置、レーン走行支援装置、および操舵補助装置
【課題】ファジィルールを合理的に選定する。
【解決手段】ファジィ制御装置は、複数の入力変量に対しファジィ推論を行って出力変量を生成し、生成した出力変量を制御対象に出力して制御するものである。ファジィ推論に利用されるファジィルールは、複数の入力変量に関するリヤプノフ関数Vの安定条件を示す条件式dV/dt<0と、複数の入力変量の少なくとも1つの時間微分と出力変量との対応関係を示す関係式とに基づいて選定される。これにより、各入力変量に対応するメンバーシップ関数を2つに減らし、ファジィルールの数を2n(nは入力変量の数)に減らすことができる。
(もっと読む)
1 - 20 / 38
[ Back to top ]