
Fターム[5H301GG06]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 走行基準物、障害物、作業対象の検出手段 (1,655) | 接触式検出手段であるもの (105)
Fターム[5H301GG06]に分類される特許
1 - 20 / 105
ロボット掃除機及びその制御方法
【課題】ロボット掃除機及びその制御方法を提供する。
【解決手段】ロボット掃除機の制御方法は、第1の掃除モードに従って、前記ロボット掃除機の位置を基準にして多数の掃除領域を定義すること;及び定義された前記掃除領域別に順次掃除を行うこと;を含む。本発明のロボット掃除機及びその制御方法によると、繰り返しモードが開始され、ロボット掃除機の位置を基準にして多数の掃除領域を定義し、掃除領域別に順次掃除を行うとき、基準壁面の検出可否によってロボット掃除機が属した掃除領域を再設定し、再設定された掃除領域内で走行経路に沿って移動しながら掃除を行うので、掃除が1回も行われていない領域や掃除の重複領域を減少させることができる。また、掃除が1回も行われていない領域や掃除の重複領域を減少させることによって、ロボット掃除機の掃除効率を向上させることができる。
(もっと読む)
ロボット掃除機及びその制御方法

【課題】補助掃除ユニットの誤作動を検出し、該検出結果に基づいてロボット掃除機の走行を制御し、補助掃除ユニットに誤作動が発生した場合にも隅部分を効率的に掃除できるロボット掃除機及びその制御方法を提供する。
【解決手段】このロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニット100と、前記補助掃除ユニットの突出、収納または回転状態を感知する感知部300と、前記感知部の感知結果に基づいて前記補助掃除ユニットが正常に動作するか否かを判断し、前記判断結果に基づいて前記ロボット掃除機の走行を制御する制御部200と、を備える。
(もっと読む)
環境地図を用いた掃除ロボット
【課題】簡単に操作でき、自動的に環境内を掃除する掃除ロボットを提供する。
【解決手段】本発明は、コンピュータ18により駆動制御する走行制御部34と、車輪センサ36と、環境との接触を検出する接触センサ38を有し、環境を掃除する掃除ロボットにおいて、環境地図を保存する環境地図記憶部25と、オドメトリ情報から得られるロボット座標を保存するロボット座標記憶部21と、多数のパーティクルの座標を保存するパーティクル座標記憶部22と、前記環境地図とパーティクル軌道を保存するパーティクル掃引地図記憶部23と、前記多数のパーティクルの尤度を演算して最適軌道を導出する最適軌道導出手段と、前記最適軌道を前記掃除ロボットの軌道として保存するロボット掃引地図記憶部23と、小尤度のパーティクルを消去するリサンプリング手段と、前記掃除ロボット及び前記パーティクルを回転反射させる反射手段を有する掃除ロボットである。
(もっと読む)
ロボット本体の嵌まり込みを防止する移動ロボット及び移動ロボット制御方法
【課題】 隙間に嵌まり込まれることを判別し、このような嵌まり込み状態から容易に脱出できる移動ロボットと、隙間を有する障害物の境界線を推定して移動する移動ロボット制御方法を提供する。
【解決手段】 移動ロボットは、ロボット本体の上部に付着されて移動ロボットの嵌まり込みを判別する嵌まり込み判別装置を有し、移動ロボットの上部に位置する障害物と衝突する接触部、接触部によって回転または直線運動をする接触作動部、接触作動部の回転または直線移動を感知して障害物の隙間への移動ロボットの嵌まり込みを認識する感知部、嵌まり込みを感知し本体を回転移動する駆動制御部を含む。
(もっと読む)
移動ロボット
【課題】他の物体に接触したことによる移動を、自己位置推定に反映することができる移動ロボットを提供する。
【解決手段】本発明の移動ロボットは、移動ロボットが他の物体に接触したことを検出する接触検知センサと、接触検知センサの検出結果に応じた、接触による移動を推定した接触移動推定モデルに基づいて、接触による移動ロボットの移動量を推定する移動量推定部と、移動量推定部によって推定された移動量に基づいて、自己位置を推定する自己位置推定部を有する。
(もっと読む)
電気掃除機
【課題】床面上の障害物へのサイドブラシの引っ掛かりにより走行不能となることを防止できる電気掃除機を提供する。
【解決手段】電気掃除機11は、床面Fに接地するブラシ毛32bを備えるサイドブラシ18を、本体ケース12の下部の吸込口の前方に旋回可能に有する。電気掃除機11は、本体ケース12よりも下方に自律走行の妨げとなる敷物Rがあるかどうかを検出する障害物検出手段21を有する。電気掃除機11は、本体ケース12よりも下方に自律走行の妨げとなる敷物Rがあることを障害物検出手段21により検出したときにサイドブラシ18を上方へと退避させる制御手段を有する。
(もっと読む)
移動駆動ユニットの動きを調整するシステムおよび方法
【課題】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法を提供する。
【解決手段】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法が、第一の移動駆動ユニットから、第一の方向に動くために第一の経路セグメントの使用を要求する予約要求を受信する段階を含む。本方法はさらに、前記第一の経路セグメント上に第二の移動駆動ユニットが現在位置されていることを判定する段階と、前記第二の移動駆動ユニットが前記第一の方向に動いているかどうかを判定する段階とを含む。さらに、本方法は、前記第二の移動駆動ユニットが前記第一の方向に動いているのではないと判定するのに応答して、前記予約要求が拒否されることを示す予約応答を送信する段階を含む。本方法はまた、前記第二の移動駆動ユニットが前記第一の方向に動いていると判定するのに応答して、前記予約要求が承認されることを示す予約応答を送信する段階を含む。
(もっと読む)
移動体
【課題】異常の発生に伴って電源が切られるなどして通常でない状態に陥ったロボットが、作業が可能な状態になるまでには、コントローラのOSの起動待ちや各種データの読み込み、センサや移動機構の動作確認などの準備が必要であり、多くの時間を要する。本発明ではこれらの準備に要する時間を短縮し、ロボットの作業可能な状態への復帰の迅速化を課題とする。
【解決手段】ロボットが再起動される際に、コントローラやセンサの状態を判定し、異常な状態にないコントローラやセンサは再起動しないようにして、再起動するデバイスを可能な限り減らすことで起動に要する時間を短縮する。
(もっと読む)
自律カバレッジロボットナビゲーションシステム
【課題】ナビゲーションビーコンにより自律モバイルロボットを隣接する有界領域に移動可能とする。
【解決手段】ナビゲーションビーコンは、第1の有界領域と、隣接する第2の有界領域との間のゲートウェイ内に配置されたナビゲーションビーコンによって、ゲートウェイマーキングエミッションを伝送するように構成されたゲートウェイビーコンエミッタを有し、自律カバレッジロボットは、ビーコンエミッションに応答するビーコンエミッションセンサ(104、106)と、ゲートウェイマーキングエミッションの検出に応えてロボットの方向を変える清掃モードで、ロボットを第1の有界領域周辺にて動かすように構成された駆動システムとを含み、駆動システムは、マイグレーションモードにおいて、ゲートウェイを通って第2の有界領域へとロボットを動かす。
(もっと読む)
無人搬送車の搬送システム
【課題】番地板や番地センサ等の動作位置指示機構を省略し、AGVと搬送経路の構造を簡単化する。
【解決手段】駆動輪と非磁性金属材であるアルミニウムを検出可能な左右1対の搬送経路検出センサを有するAGV10を備え、製造工場1の床面上にアルミニウムにより形成されたガイド部G1〜GN+1とガイド部を遮断した複数の不設置部P1〜PNとによりループ状の搬送経路2を形成している。各不設置部にはAGVの動作位置とこれらの動作位置で実行する停止動作、進路変更動作、発進動作、物品降ろし動作、物品積載動作のうち少なくとも1つの動作を指示する動作位置指示機能がオフラインティーチングにより付与されている。
(もっと読む)
個人の相互交流のためのコンパニオンロボット
【課題】ロボットを人間と相互交流できるようにする。
【解決手段】人間の居住者と相互交流するための来客としての移動ロボット10は、居住者との相互交流に先立ち、部屋を縦横に捜索手順を実行し、目的の居住者が在宅しているか口頭で尋ねることがある。居住者を発見した時点で、移動ロボットは、遠隔地第三者とのテレビ会議セッションを実施する、または種々の方法で居住者と相互交流することができる。例えば、ロボットは、居住者と会話をし、薬剤または他のスケジュールの遵守を促進する。さらに、ロボットは、居住者との衝突を回避するための安全機能を組み込み、またロボットは、危険な障害にならないように、その存在を聞こえるように知らせる、および/または目に見えるように示すことができる。さらに、あらゆるセンサの記録および転送が居住者に承認されるように、移動ロボットは、組み込まれたプライバシーポリシーに従い行動する。
(もっと読む)
小型自律カバレッジロボット
【課題】筐体が長方形の前方部と半円形の後方部とを有し、清掃機構が壁の隅部または壁のへりに及ぶことによって、その長方形の部分が壁の隅部または壁のへりに接するように動くことができる自走式カバレッジロボットを提供する。
【解決手段】衝突に応じて、進行方向および進行方向と直角にまじわる方向に移動可能であるバンパーと、バンパー内に配置される近接センサと、バンパーの移動を検出する複数の衝突センサと、差動駆動される右および左駆動車輪を備える駆動システムと、駆動軸に平行な横軸に沿って配置されるフリーホイールと、ローラブラシを備える清掃アセンブリと、を備え、バンパーは、清掃アセンブリの3つの側面の周囲に配置され、清掃アセンブリは、フリーホイールの前方において、清掃面上で片持ち構造で保持され、近接センサと多方向衝突センサは、ロボットが駆動軸周りに回転する際に、筐体の側面に平行な壁を検出する構成とした。
(もっと読む)
電動車両及びその制御方法
【課題】安全に障害物を回避することが可能な電動車両を提供することを目的とする。
【解決手段】電動車椅子11は、車体部12と、操作者の操作を検出する操作部13と、車体部12の周辺にある障害物を検出する障害物センサ14と、車体部12から操作方向に生成される領域をサーチ領域21として、サーチ領域21内に存在する障害物を、回避すべき障害物と判断する障害物判断部15と、障害物判断部で判断された障害物から離れるための仮想斥力を算出する仮想斥力算出部16と、操作力及び仮想斥力の合力を算出する合力算出部17と、合力の方向へ移動するように制御する制御部18とを備える構成である。
(もっと読む)
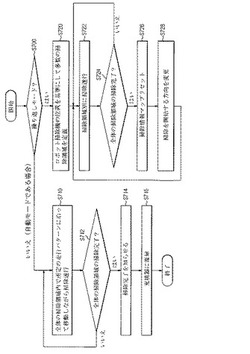
自律走行作業車の制御装置
【課題】走行予定領域の境界と走行予定領域における作業車の位置を簡易な構成で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】原動機(電動モータ)と、原動機に接続される駆動輪と、作業機(ブレード)とを備え、走行予定領域を原動機を駆動して自律走行しつつ作業する自律走行可能な作業車の制御装置において、方位(地磁気)センサの出力に基づいて絶対方位を検出すると共に、磁気ネイル(磁石)に対する位置を検出し、磁気ネイルの埋設位置を座標で示す地図情報と検出された位置に基づいて走行予定領域における作業車の位置を検出し(S12,S20,S32)、検出される絶対方位と作業車の位置とYawセンサなどの出力に基づいて算出される進行方位と走行距離に基づき、予め定められた作業プログラムに従って走行予定領域Aでの作業を制御する(S10からS46)。
(もっと読む)
自動搬送車の制御方法
【課題】自動搬送車を横行又は斜行させた後、新たな導線への追従状態に移行するための制御方法であって、新たな導線に円滑に乗り移ることで、追従状態への移行に要する時間を短縮可能な自動搬送車の制御方法を提供すること。
【解決手段】自動搬送車2が横行でガイドライン12へ接近して乗り移るための制御方法は、駆動ユニット3をガイドライン12に接近させる第1の走行ステップと、ラインセンサ351がガイドライン12を検出した後、再びガイドライン12を検出しなくなるまで駆動ユニット3をそのまま前進させる第2の走行ステップと、第2の走行ステップの後、ラインセンサ351によりガイドライン12を再検出できるように駆動ユニット3を操舵する第3の走行ステップと、ラインセンサ351によるガイドライン12の再検出に応じて追従走行制御への切換を実行する移行ステップと、を含んでいる。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域において予め定められた走行パターンに従って走行すると共に、角速度センサの出力を適正に較正するようにした自律走行作業車の制御装置を提供する。
【解決手段】作業車の重心位置の鉛直軸回りに生じる角速度を示す出力を生じるYawセンサと車輪速を示す出力を生じる車輪速センサの出力に基づいて算出される進行方位と走行距離に基づき、走行予定領域において予め定められた走行パターンに従い、作業車を直進走行させつつ、作業させる走行作業制御において、直進走行のとき、予め定められた走行パターンで予定される予定走行距離L1と実走行距離L2の差が誤差許容値αを超えるか否か判定し(S10からS18)、差が誤差許容値を超えると判断されるとき、Yawセンサの出力の中心値を補正する(S22)。
(もっと読む)
移動型ロボット清掃機
【課題】効率的なカバレッジの処理ため、複数のモードで動作させることが可能な移動型ロボット清掃機を提供することを目的とする。
【解決手段】 移動型ロボット清掃機であって、円形のロボット本体を前進/回転させる駆動機構と、ロボット本体に接する障害物を検出する衝突センサと、ロボット本体の支配側の障害物を検出する追従センサと、床面の埃を収集する清掃ヘッドと、衝突センサと追従センサからの出力に基づいて駆動機構を制御するコントローラとを備え、該コントローラは、直線モードとバウンスモードを切り替えることができ、直線モードでは、衝突センサが障害物を検出するまでロボット本体を直線に沿って前進させ、バウンスモードでは、衝突センサが障害物を検出した場合に回転させて障害物から遠ざけ、その後、直線モードにて変更後の向きに前進させるよう制御する構成とした。
(もっと読む)
搬送装置
【課題】搬送車に所定の積載物が設置されているか否か(所定の積載物の有無)を確実に特定可能であり、障害物検出手段による検出範囲を所定の積載物の有無に応じて正確に変更可能な搬送装置を提供する。
【解決手段】搬送車11と、バンパーセンサ12と、制御装置15と、を有する搬送装置10であって、搬送車11に所定の積載物(自動車のボデー1・台車3)が設置されているか否かを検出して、搬送車11に前記所定の積載物が設置されている場合には積載物信号を出力する積載物検出手段(センサ13・14)を有し、前記所定の積載物の寸法は、搬送車11の寸法よりも大きく構成され、制御装置15は、前記積載物検出手段から前記積載物信号を受信した場合に、バンパーセンサ12による検出範囲を前記所定の積載物の寸法に応じた広さに変更することを特徴とする。
(もっと読む)
自律型カバレッジロボット
【課題】移動中に遭遇する障害物を回避することが可能な自律型カバレッジロボットを提供することを目的とする。
【解決手段】自律カバレッジロボットであって、方位設定および速度設定に従ってロボットを操縦するように構成された駆動システムと、前方向における障害物とのロボットの衝突に応答する衝突センサと、ロボット前方における潜在的な障害物に応答する近接センサと、を備え、駆動システムは、方位設定に従ってロボットを前進させ続ける間に、潜在的な障害物の検出を示す近接センサからの信号に応答して、速度設定を低減するように構成され、駆動システムは、障害物との接触を示す衝突センサから、および障害物の周囲を追従し、障害物からロボットを離れるように向けるための近接センサから受け取った信号に応答して、方位設定を変更するように構成されることを特徴とする。
(もっと読む)
無人搬送車
【課題】床面の案内手段を必要とせずに簡素な構成で所定経路を自走でき、取り扱いに対して柔軟性を有する無人搬送車を提供する。
【解決手段】本無人搬送車1は、その搬送車本体1aの前方に突設され、駆動輪5に対して左右方向のいずれか一方にオフセットさせて配置される方向転換用ローラ7と、搬送車本体1aの側方に前端及び後端の2箇所突設され、壁20との接触により無人搬送車1を壁20に沿って自走させる各壁並進用ローラ10、11とを備えているので、床面の案内手段を必要とせずに簡素な構成で所定経路を自走でき、取り扱いに対して柔軟性を有するようになる。
(もっと読む)
1 - 20 / 105
[ Back to top ]