
Fターム[5H301KK05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 地上設備の状態の監視 (26)
Fターム[5H301KK05]の下位に属するFターム
被搬送物の状態の監視 (10)
Fターム[5H301KK05]に分類される特許
1 - 16 / 16
搬送車システム
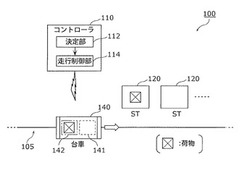
【課題】効率的な搬送作業を実現するための搬送車システムを提供すること。
【解決手段】複数のステーション120に沿って設けられた経路105と、経路105に沿って走行する台車140と、台車140の制御を行うコントローラ110とを備える搬送車システム100であって、台車140は、走行方向に並べて配置された第一載置台141と第二載置台142とを有し、方向転換することで、第一載置台141および第二載置台142のいずれをも走行方向における前方とすることが可能であり、コントローラ110は、荷物の移載作業の内容と荷物の載置状況とを用いて、第一載置台141および第二載置台142のいずれを前方にすべきかを決定する決定部112と、台車140の走行を制御することで、台車140を、決定された第一載置台141または第二載置台142が前方である状態で、目的ステーションに到着させる走行制御部114とを有する。
(もっと読む)
物品搬送装置

【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
走行台車システムとその自己診断方法
【課題】
移動体システムでのトラブルの発生を予防する。
【構成】
複数の走行台車が地上側コントローラの指示により走行経路に沿って走行するシステムを自己診断する。地上側コントローラは、走行経路上の位置を一意に特定する絶対座標により、異常検出用センサによる検出を行う位置を走行台車に指定し、走行台車は、指定された位置で異常検出用センサによる検出を行い、検出位置と検出時刻を含む検出データを地上側コントローラへ報告する。
(もっと読む)
自律走行装置
【課題】鉱山における土砂運搬用トラックなどの車両の自律走行技術が求められている。安全かつ高効率の土砂運搬作業実現のため、鉱山で高速走行する車両同士が安全に擦れ違えるように車両の走行を制御する必要がある。
【解決手段】通常は単独走行用の道路を車両が走行し、対面車両が来た場合は擦れ違い用の道路に走行路を切り替えるために、各車両が走行時に自車付近の路面状態を測定して得た路面情報を、運行管理を行っている運行管理センタに送信してセンタ側で集約し、地点ごとの路面状態がセンタから取得できるようにする。そして、擦れ違う自律走行トラック同士が擦れ違い用の道路に切り替える際には、センタからの路面情報を元に路面状態が悪化している地点を避けて走行レーンを切り替える。
(もっと読む)
搬送システムと搬送指令の転送方法
【課題】搬送車システムに異常がある場合の無駄な通信を減らし、かつ搬送要求を実行不能とするまでの処理を簡単化する。
【解決手段】上位コントローラに、走行ルートを構成する部分ルートの接続関係と、各部分ルートの走行の可否とを記憶するための記憶部とを設ける。記憶部のデータから、搬送要求を実行するために必要な部分ルートと部分ルートの走行の可否とを求めて、搬送要求の内で実行可能な搬送要求のみを下位コントローラへ送信する。
(もっと読む)
自動搬送システムおよび自動搬送システムにおける搬送車の待機位置設定方法
【課題】搬送車の待機位置の最適化を図ることによりキャリアを効率的に搬送することが可能な自動搬送システムおよび待機位置の設定方法を提供する。
【解決手段】断続的に供給される搬送指令に基づいて所定の経路網を自動的に移動して経路網に沿って設置された複数の処理装置間において搬送物を搬送する少なくとも1台の搬送車と、搬送車制御手段と、複数の停止位置、複数の移動位置、処理装置の各々の搬送物の単位時間あたりの処理数とが記録された記録手段と、搬送車が搬送指令を受ける前の待機状態にあるときの待機位置設定手段とを含み、待機位置設定手段は、記録手段に記録された停止位置、移載位置および処理能力情報に基づいて、停止位置のうちの何れかを待機位置としたときの当該停止位置と移載位置の各々との間の搬送車の搬送指令に基づく単位時間あたりの総移動距離を停止位置毎に算出し、そのうち最小値に対応する停止位置を待機位置として設定する。
(もっと読む)
搬送車システム
【課題】搬送効率を維持しながら安全を確保することが可能な搬送車システムを提供する。
【解決手段】本発明に係る搬送車システムは、物体を検出するライトカーテン30A〜30Fをクレーン10の走行経路20周辺に設けた搬送車システムであって、ライトカーテン30A〜30Fの物体を検出したという検出結果を受信したとき、クレーン10の速度を制御する制御手段と、ライトカーテン30A〜30Fとクレーン10との間の距離に応じて、ライトカーテン30A〜30Fの検出結果を前記制御手段に送信するか否かを判定する判定手段とを備える。
(もっと読む)
移動ロボット
【課題】 監視員の確認負担を軽減した移動ロボットの提供。
【解決手段】 監視区域の異常を検知する移動ロボットであって、監視区域の現状態及び予め設定された監視区域における重要エリアとを記憶する記憶部と、異常を検知すると記憶部に異常状態を記憶させる異常処理手段と、異常を検知すると監視センタに異常信号を送信する通信制御手段と、自己の現在位置を検出する位置検出部と、異常を検知したときの現在位置が重要エリア外か否かを判定する位置比較手段と、自動復旧モードを含む複数の動作モードを管理するモード設定手段と、動作モードが自動復旧モードであるときに、重要エリア外の位置において異常が検知されると、当該異常信号の送信を禁止するとともに当該異常状態を解除するための復旧処理を実行する復旧処理手段とを備える。
(もっと読む)
遠隔監視システム
【課題】 監視員の負担を軽減しつつ重要な時間帯のセキュリティ性を向上させる
【解決手段】 監視区域の異常を検知する検知部を備えて監視区域を移動する移動ロボットと、移動ロボットと通信する監視センタとを有する遠隔監視システムであって、移動ロボットは、検知部が異常を検知すると記憶部に異常状態を記憶させる異常処理手段と、検知部が異常を検知すると監視センタに異常信号を送信する通信制御手段と、記憶部の異常状態を解除するための復旧処理を実行する復旧処理手段と、を備え、監視センタは、予め設定された自動復旧の禁止時間帯を識別可能な設定情報を記憶したセンタ記憶部と、移動ロボットに復旧処理を自動的に実行させる自動復旧モードを含む複数の動作モードを管理するモード設定手段と、を備え、モード設定手段は、現在時刻が禁止時間帯になると動作モードとして自動復旧モードを設定することを禁止する。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 移動ロボットは、現在位置を検出する位置検出部と、検知部が異常検知すると記憶部に異常状態を記憶させる異常判定手段と、検知部の異常検知に基づく異常情報及び現在位置を監視センタに送信する通信制御手段と、記憶部の異常状態を解除する復旧処理を実行する復旧処理手段とを備え、監視センタは、重要エリアを記憶するセンタ記憶部と、自動復旧モードを含む複数のモードを管理するモード設定手段と、移動ロボットから異常情報を受信すると動作する報知部と、移動ロボットの現在位置と重要エリアを比較する位置比較手段と、自動復旧モードであるときに重要エリア外で検知された異常情報を受信すると、報知部の動作を禁止して移動ロボットに復旧処理を実行させる自動復旧制御手段とを備える。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 移動ロボットは、検知部が異常を検知すると記憶部に異常状態を記憶させる異常判定手段と、検知部が異常を検知すると異常情報を監視センタに送信する通信制御手段と、記憶部の異常状態を解除する復旧処理を実行する復旧処理手段と、を備え、監視センタは、自動復旧を禁止すべき異常を識別するための設定情報を記憶したセンタ記憶部と、自動復旧モードを含む複数の動作モードを管理するモード設定手段と、異常情報を受信したときに動作する報知部と、動作モードが自動復旧モードであるときに、自動復旧禁止異常以外の異常情報を受信すると、報知部の動作を禁止して移動ロボットに復旧処理を実行させる自動復旧制御手段と、を備える。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 監視区域の異常を検知する移動ロボットであって、 監視センタと通信する通信部と、監視区域の異常を自動復旧禁止異常か自動復旧禁止異常以外の異常かを識別可能に設定した設定情報および前記監視区域の現状態を記憶する記憶部と、異常を検知すると記憶部に異常状態を保持させる異常処理手段と、異常を検知すると監視センタに異常信号を送信する通信制御手段と、自動復旧モードを含む複数の動作モードを管理するモード設定手段と、動作モードが自動復旧モードであるときに、自動復旧禁止異常以外の異常が検知されると、当該異常信号の送信を禁止するとともに当該異常状態を解除するための復旧処理を実行する復旧処理手段とを備える。
(もっと読む)
移動ロボット
【課題】 雨天時において、移動の開始直後の安全性を確保した移動ロボットの提供。
【解決手段】 移動手段により屋外の路面上を移動する移動ロボットであって、検出窓を通して、走行に支障となる恐れがある障害物の情報を検出する検出部と、検出部の検出窓に空気を吹き付けて検出窓に付着した水滴を除去する水滴除去部と、路面の濡れ状況を検出する路面状態検出部と、予め記憶したスケジュール又は外部からの信号入力に基づき移動制御の開始を判定する制御部とを有し、前記制御部は、移動制御の開始と判定されたときに、路面状態検出部にて路面の濡れが判定されない場合には移動手段にて移動を開始するよう制御し、路面の濡れが判定された場合には水滴除去部を動作させ該動作の開始から所定時間が経過した後に移動手段にて移動を開始するよう制御する。
(もっと読む)
自走式装置及び自走式掃除機
【課題】1台で、ペット等の対象物の状態をユーザに確実に知らせることができる自走式装置及び自走式掃除機を提供する。
【解決手段】自走式掃除機1のおいて、所定の対象物に取り付けたICタグから識別情報等を読み取るICタグ読取部131と、ICタグ読取部131により読み取られた識別情報等を含む監視情報を、ユーザ所有の携帯電話機に送信する通信部134と、を備えるよう構成した。
(もっと読む)
搬送台車システム
【構成】 搬送台車24の行先がポイント20からポイント18に変更されると、搬送台車24は最寄りの分岐ポイント10までに新たな走行ルートを算出できるように速度制御する。搬送台車24は、不要になったブロッキングの、分岐ポイント10の直進、合流ポイント14の直進、分岐ポイント12の分岐をキャンセルし、分岐ポイント10の分岐のブロッキングを再要求し、新たな走行ルートに基づいて走行する。
【効果】 行先変更時に搬送台車が停止する必要がないので、搬送効率が改善する。
(もっと読む)
無人搬送車の充電制御方法
【課題】 無人搬送車10が充電器13から充電を行っている間に、無人搬送車11と無人搬送車10との間に充電器が無い場合、無人搬送車11は、無人搬送車10が充電を終わるまで待機することとなり、作業能力の低下を招いている。
【解決手段】 無人搬送車10の進行方向がSlで次の充電ポイントまでに1台も他の無人搬送車が無くまた次の充電ポイントの充電器14が充電中で無い場合に上位コンピュータ2は充電終了の指示を給電用コンピュータ3に指示し、終了の指示を受けた給電用コンピュータ3は充電器13に対し充電終了を指示する。充電終了の指示を受けた充電器13は無人搬送車10に対し充電終了の指示を発行し無人搬送車10は現在の充電を終了し、次の充電ポイント14に向かう。
(もっと読む)
1 - 16 / 16
[ Back to top ]