
Fターム[5H301KK19]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 制御信号、検出信号の伝送手段の限定 (229) | 移動体と直接送受信するもの (118)
Fターム[5H301KK19]に分類される特許
21 - 40 / 118
物品搬送装置
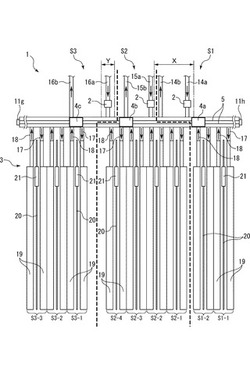
【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
物品搬送設備

【課題】走行台車による物品を搬送する速度の低下を避けながらも省エネルギー化を図ることができる物品搬送設備を提供する。
【解決手段】制御手段が、複数の物品移載箇所の間で物品を搬送する物品搬送作業を行わせるべく複数台の走行台車のうちから選択した作業用走行台車を、目標の物品移載箇所まで搬送用速度で走行させる搬送処理を実行するとともに、作業用走行台車と搬送処理における目標の物品移載箇所との間に、非作業用走行台車が存在する場合は、当該非作業用走行台車を、搬送用速度よりも低速の追い出し用速度で走行させて作業用走行台車の走行方向で目標の物品移載箇所よりも前方まで追い出す追い出し処理を実行する。
(もっと読む)
搬送車システム
【構成】 複数台の搬送車を、同一走行ルートに沿って、搬送車間の干渉を回避しながら、往復動させる。搬送車が搬送指令を実行するために走行する際の、搬送車間の干渉の有無を判断し、干渉が存在する際に、干渉を回避しながら搬送指令を実行するためのパターンを複数生成し、生成したパターンから、搬送車がパターンを実行するための時間が短いものを選択して、搬送車に実行させる。
【効果】 干渉を回避しながら短時間で搬送指令を実行でき、またパターンを短時間で生成できる。
(もっと読む)
対象者検出システム、対象者検出方法、対象者検出装置および移動式情報取得装置
【課題】対象者が固定カメラの検出範囲内に所在する場合のみならず、対象者が固定カメラの非検出範囲に所在する場合を含めて対象者の所在や行動を検出すること。
【解決手段】管理装置は、固定カメラAを用いて対象者のアピアランス情報を検出し、検出したアピアランス情報に基づいて対象者の絞り込みを行う。また、管理装置は、固定カメラAおよび固定カメラBによるアピアランス情報の検出結果を用いて対象者の異常を検知する。そして、管理装置は、対象者の異常を検知すると、固定カメラAおよび固定カメラBの非検出範囲へ移動ロボットを移動させ、移動ロボットを用いて検出した顔情報に基づいて対象者を特定する。
(もっと読む)
自動搬送台車の衝突事故回避システム及び自動搬送台車の衝突事故回避方法
【課題】コーナー部や出入り口等、視界の利かない通路を走行する場合であっても、未然に危険を予知して安全対策を施すことを可能にする自動搬送台車の衝突事故回避システム及び自動搬送台車の衝突事故回避方法を提供する。
【解決手段】この自動搬送台車の衝突事故回避システムでは、自動搬送台車1、2、3と人が通行する場所を、衝突事故が発生する可能性が高い危険ゾーンと、この危険ゾーンに近接した予知ゾーンとを含む複数のゾーンに分割して設定する。そして、危険ゾーンと予知ゾーンにそれぞれ設けられ、自動搬送台車1、2、3と人を検知する検知手段4、5、6、7と、予知ゾーン及び/又は危険ゾーンに侵入した自動搬送台車1、2、3及び/又は人に警報を発信するアラーム装置8、9と、検知手段4、5、6、7からの検知結果を受け、この検知結果に基づいてアラーム装置8、9に警報発信信号を送信する制御装置10とを備えている。
(もっと読む)
自律移動システム及び自律移動装置
【課題】自律移動装置が指定された経路から逸れることが無い移動計画を行うことができる自律移動システム及び自律移動装置を提供する。
【解決手段】管理装置は、通信装置37を介して各自律移動装置2a、2bから受信する集約データに基づいて、地図上の位置座標と、自律移動装置2a、2bで推定される自己位置が不確かになる程度を判断する誤差分布データとを対応付けて登録する誤差登録地図を管理する地図管理部310と、この地図管理部310で管理される誤差登録地図310cに基づいて、各自律移動装置2a、2bが経路から逸れることが無い又は逸れる確率を低くする、動作及び/又は経路を指定する移動計画を行う運用管理部320を備える。
(もっと読む)
複数移動体の行動範囲制限システム
【課題】複数の移動体のうち、あらかじめ設定された行動範囲を逸脱した移動体に対して、設定行動範囲内に帰還するように該子機を制限するシステムを提供する。
【解決手段】本発明による行動範囲制限システムは、乗員によって運転可能な、1つ以上の子機と、前記子機の位置を制御する特定機と、前記子機及び特定機の位置情報を供給する位置測定装置とからなる。特定機202Mは、位置測定装置206から特定機及び子機の現在位置情報を取得し、子機202Sの位置が特定機によってあらかじめ設定された制限領域302を逸脱しているか否かを判断し、逸脱している場合、特定機202Mは、子機202Sに対して、前記制限領域302内の目標帰還位置に移動するように指示情報を送信する。子機202Sは、前記指示情報を受信すると、位置情報に基づいて前記目標帰還位置に移動するように移動動作部5を制御する。
(もっと読む)
コークス炉用移動機械の走行制御方法
【課題】コークス炉用移動機械の減速時にスリップが生じてもコークス炉用移動機械が目標停止位置から大きくずれた位置で停止したり、あるいはコークス炉用移動機械が制限速度を超えた速度で速度制限域に進入したりすることなくコークス炉用移動機械の走行を制御することのできるコークス炉用移動機械の走行制御方法を提供する。
【解決手段】コークス消火車などのコークス炉用移動機械の減速時にコークス炉用移動機械の実走行速度VCと目標走行速度VOとの速度偏差ΔVを予め定めた閾値Xと比較し、速度偏差ΔVが閾値Xを超えたときにコークス炉用移動機械の機械的ブレーキ装置を作動させるブレーキ作動信号を送出してコークス炉用移動機械の走行を制御する。
(もっと読む)
無人搬送システム
【課題】搭載メモリを増やすことなく、停止位置数、分岐点数を増やすことができる無人搬送システムを提供する。
【解決手段】搬送ルート1を、2つの搬送路群1L、1Rと2つの搬送路群1L、1Rが共用する1つの共用路1cとから形成すると共に、共用路1Cから2つの搬送路群1L、1Rへ分岐する最初の分岐点B1以降において、分岐路W1L〜W25L、W1R〜W25R及び停止位置ST001〜ST050、ST101〜ST150を、2つの搬送路群1L、1R同士で互いに同じ位置関係になるように配置し、最初の分岐点B1においては、HS20からの指示により、2つの搬送路群1L、1Rのいずれか一方にAGV10を進行させ、各搬送路群1L、1Rにおいては、共に、同じ内部データを用いて、左右いずれか一方の分岐路へAGV10を進行させる。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、搬送車が目的地まで最短距離で走行すると荷つかみまたは荷下ろしできない場合でも、搬送効率を低下させない。
【解決手段】搬送車システム1は、複数の経路と、搬送車3と、搬送車コントローラ27とを備えている。複数の経路はあらかじめ定められている。搬送車3は、複数の経路を走行して物品Wを搬送する。搬送車コントローラ27は、入庫ポート13において荷下ろしが可能か否かを判断する。搬送車コントローラ27は、さらに、荷下ろしが可能ではないと判断すると、入庫ポート13への走行路として最短距離の経路より長い距離の経路を選択して搬送車3に指示することができる。
(もっと読む)
車両の誘導装置
【課題】
走行コースの修正を作業効率よく行うようにする(ティーチングによる方法よりも作業効率よく走行コースの修正を行う)。
【解決手段】
走行位置計測手段で計測される無人車両の走行位置と、該無人車両の誘導コースを規定するコースデータとに基づいて、前記無人車両を前記誘導コースに沿って誘導走行させる無人車両の誘導装置であって、コースエリアの境界線のデータを入力する手段と、移動起点の位置とその位置における前記無人車両の方向および移動目的点の位置とその位置における車両進行方向とをそれぞれ指示する手段と、前記移動起点の位置および移動目的点において、前記指示された位置と車両進行方向が満足されるコースデータを作成する手段と、前記作成されたコースデータで規定される誘導コースで無人車両を走行させた場合の該無人車両と前記コースエリアの境界線との干渉を推認する手段と、前記干渉が推認された場合に、前記コースデータを変更するコースデータ変更手段と、を備える。
(もっと読む)
走行車の走行制御システムと制御方法
【課題】 走行車システムのスループットを増す。
【構成】 地上コントローラと走行車とを通信システム及び地上を介して接続する。地上コントローラから走行車に位置の制御周期毎に位置指令を与え、走行車は制御周期内で複数の速度指令とトルク指令とを自ら発生させて、位置指令を達成する。
(もっと読む)
走行車システム
【構成】 走行経路に走行車の減速度が異なる複数の区間を設ける。走行車は、走行車の走行速度と、複数の区間の減速度中で最大の減速度と、機体長パラメータとを用いて、干渉回避距離を演算する。また区間の減速度が最大の減速度よりも小さい区間で、機体長パラメータを、最大の減速度の区間よりも長くする。
【効果】 簡単な制御で、走行車の減速と再加速の繰り返しを回避でき、さらに走行車間の干渉も回避できる。
(もっと読む)
移動ロボット、走行計画マップ生成方法、管理システム
【課題】走行計画マップを自動的に生成及び更新可能な移動ロボット、移動ロボットの走行計画マップ生成方法、移動ロボットの管理システムを提供すること。
【解決手段】移動ロボットは、操縦モード時に操縦者が移動ロボットを操縦する操縦部10と、移動ロボットの現在位置を推定する位置推定部12と、移動ロボットの現在速度を検出する速度検出部14と、操縦モード時に、位置推定部12の推定結果と速度検出部14の検出結果を含む移動ロボットの走行履歴情報を収集する走行履歴情報収集部15と、走行履歴情報に基づいて、移動ロボットの走行計画マップ17を生成し、更新する走行計画マップ生成更新部16と、走行計画マップ17を用いて、移動ロボットの走行経路を計画する走行計画部18と、計画した走行経路に追従するように、移動ロボットの走行を制御する走行制御部19を備える。
(もっと読む)
搬送車システム
【課題】搬送機能を低下させることなくデッドロックを回避可能な搬送車システムを提供する。
【解決手段】 搬送車システム1は、予め定められた経路を走行する複数の搬送車3と、搬送車3を管理する搬送車コントローラ27とを備えている。搬送車3は、所定範囲先のポイントまでの第1ブロッキング要求と、所定範囲先のポイントより先のポイントまでの第2ブロッキング要求とを搬送車コントローラ27に送信するブロッキング要求部3aを有している。搬送車コントローラ27は、第1ブロッキング要求に対して許可を出すことができるブロッキング許可部27aを有している。ブロッキング許可部27aは、第2ブロッキング要求によってデッドロックを判断する。搬送車3は、第1ブロッキング要求に対して許可を得たポイントまで走行する。
(もっと読む)
車両の誘導装置
【課題】
走行コースの修正を作業効率よく行うようにする(ティーチングによる方法よりも作業効率よく走行コースの修正を行う)。
【解決手段】
走行位置計測手段で計測される無人車両の走行位置と、該無人車両の誘導コースを規定するコースデータとに基づいて、前記無人車両を前記誘導コースに沿って誘導走行させる無人車両の誘導装置であって、コースエリアの境界線のデータを入力する手段と、移動起点の位置とその位置における前記無人車両の方向および移動目的点の位置とその位置における車両進行方向とをそれぞれ指示する手段と、前記移動起点の位置および移動目的点において、前記指示された位置と車両進行方向が満足されるコースデータを作成する手段と、前記作成されたコースデータで規定される誘導コースで無人車両を走行させた場合の該無人車両と前記コースエリアの境界線との干渉を推認する手段と、前記干渉が推認された場合に、前記コースデータを変更するコースデータ変更手段と、を備える。
(もっと読む)
搬送台車システム及び搬送台車への走行経路の指示方法
【構成】 搬送台車の走行ルートを構成する、互いに連結された複数のセグメントから、搬送台車を実際に走行させる経路を構成する複数のセグメントをオペレータがマニュアルで指定することを受け付け、指定された複数のセグメントに従って、走行指令を作成し、走行指令に従って搬送台車を走行させる。
【効果】 マニュアルでの走行経路の指定が容易になる。
(もっと読む)
ロボットの制御方法およびロボットの制御システム
【課題】通路の合流点でロボットの衝突を回避しロボットが渋滞するのを緩和する。
【解決手段】複数の自走するロボット10が合流点を含む通路5を走行するロボット10の制御方法であって、通路5の合流点に第1領域6を設け、さらに第1領域6の外側に第2領域7を設け、第1領域6に複数のロボット10が進行した場合に、優先順位の低いロボット10を待機させると共に優先順位の高い順番にロボット10Aを走行させ、かつ、走行したロボット10Aに後続するロボット10Fが第2領域7に存在している場合には、先頭のロボット10Aに続いて第2領域7に存在しているロボット10Fが走行する。
(もっと読む)
搬送システム制御装置、搬送システムの制御方法およびプログラム
【課題】無人搬送台車(AGV)をより高い充電残量で待機させておくことが可能な搬送システム制御装置、搬送システムの制御方法およびプログラムを提供する。
【解決手段】本発明に係る搬送システム制御装置に対して、生産ラインにおける物品の生産状況に関する情報である生産状況関連情報を取得する生産状況関連情報取得部と、AGVの充電量に関する情報を含む搬送台車関連情報を取得するとともに、AGVが実行すべき作業に関する指示を伝送し、AGVの稼働状況の制御を行う無人搬送台車制御部と、生産状況関連情報および搬送台車関連情報に基づいて、無人搬送台車の稼働状況予測シミュレーションを行ってAGVの搬送負荷を予測し、搬送負荷の予測結果に基づいて、AGVに対して割り付ける作業を決定する稼働スケジュール決定部と、を設けた。
(もっと読む)
組立部品供給システム
【課題】多種多様でバラ積みされた部品の部品棚から組立工程への搬送を確実かつ効率よく搬送する。
【解決手段】移動ロボット1を移動する移動手段2と、搬送対象物を移動ロボット1へ移載する移載手段3と、搬送対象物と移載手段3を撮像する撮像手段6と、遠隔操作装置20との通信手段11と、操作者26の操作指令に従って制御を行う制御手段19を備えた1台以上の移動ロボット(A〜D)1a〜1d、および移動ロボットの移動を、通信手段31を通じて制御する運行制御装置30、および移動ロボットと通信手段21を介して切替手段23で選択し、撮像手段6の映像を表示する映像表示手段22と、操作指示を行う操作手段24を備えた遠隔操作装置20で構成される。移動ロボットから送信される画像を用いて移載手段3を遠隔操作し、搬送および積み降ろし作業を行う。これにより、部品棚5から組立工程35への部品搬送を確実かつ効率よく低コストで行う。
(もっと読む)
21 - 40 / 118
[ Back to top ]