
Fターム[5H301KK19]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 制御信号、検出信号の伝送手段の限定 (229) | 移動体と直接送受信するもの (118)
Fターム[5H301KK19]に分類される特許
41 - 60 / 118
搬送システム
【課題】例えば半導体装置製造用の各種基板などの荷を搬送する搬送システムにおいて、基準データの配信時間をなるべく短くしつつ、基準データを効率よく配信する。
【解決手段】搬送システム(100)は、軌道(1)に係る基準データのうち修正が反映された基準データ部分である修正用データを生成するデータ生成手段(11)と、生成された修正用データをブロードキャスト方式で配信する配信手段(12)と、軌道に沿って荷を搬送可能である搬送車、配信された修正用データを受信する通信手段、受信された修正用データで更新され得る基準データに従って搬送させる搬送制御手段(4)、及び受信される修正用データの通信に係るエラーを検出するエラー検出手段(6)を夫々備える複数の搬送手段(3)と、エラーが検出された場合に、生成された修正用データを再度配信させる再配信制御手段(13)とを備える。
(もっと読む)
搬送制御装置及び搬送システム

【課題】例えば半導体装置製造用の各種基板などの荷を搬送する搬送車に夫々備えられており、地図情報に従って当該搬送車を軌道上で如何に搬送させるかを決める搬送制御装置において、当該搬送車の停止時間をなるべく短くする。
【解決手段】搬送制御装置は、地図要素を含む基準地図データを格納する第1格納手段(5b)と、地図要素に対して修正が加えられる場合に、修正用地図データを受信する通信手段と、受信された修正用地図データを格納する第2格納手段(5a)と、所定のトリガーを受けて、格納されている修正用地図データを取り出して、取り出された修正用地図データで、格納されている基準地図データを置き換える更新手段(4)と、格納されている基準地図データに従って、軌道上で搬送車が如何に搬送するかを決め、決められた通りに搬送するように搬送車を制御する制御手段(4)とを備える。
(もっと読む)
ロボット操作装置及びロボット操作システム
【課題】移動経路に自由度を持たせながらも、ユーザによる移動位置の指定操作が煩雑になるのを防止することが可能なロボット操作装置等を提供する。
【解決手段】ロボットに動作指示を与え、ロボットを動作させるためのロボット操作装置であって、ユーザが操作をする操作入力部102と、操作入力部102の操作によってユーザから入力された動作指示の履歴を蓄積するベースポイントデータベース105と、ベースポイントデータべース105に蓄積された動作指示の履歴に基づいてロボットが次に動作する動作候補を複数生成する動作候補生成部108bと、動作候補生成部108bで生成された複数の動作候補をユーザにより選択可能に提示する情報提示部103とを備えたものである。
(もっと読む)
搬送車システム
【構成】 複数の搬送車が走行する走行ルートに沿ってロードポートを設け、コントローラから搬送車へ搬送指令を割り付けると共に、割付済みの搬送指令を他の搬送車に移し替える。搬送指令を他の搬送車に移し替える際に、荷すくいするロードポートに他の搬送車が停止可能か否かを判別し、停止可能な際にのみ搬送指令を移し替える。
【効果】 搬送指令を移し替えた搬送車が、搬送指令とは異なる方向に分岐することがなくなる。
(もっと読む)
搬送システム
【課題】搬送システムにおいて、搬送車の走行を好適に制御し、効率的な搬送を可能とする。
【解決手段】搬送システムは、軌道(100)と、軌道上を夫々走行する複数の搬送車(200)と、被搬送物(400)を保管する複数の保管棚(500)と、複数の搬送車に対して、被搬送物を搬送するように搬送指示を行う搬送指示手段(320)と、搬送指示に先立って、一の搬送車を搬送元に呼び込むと共に搬送指示が行われるまで待機状態にさせる搬送予告手段(310)と、待機状態とされた一の搬送車から所定距離の範囲内への他の搬送車の進入を検出する進入検出手段(330)と、進入から搬送指示が行われるまでの残り期間が所定期間より長いか否かの判定を行う判定手段(360)と、残り期間が所定期間より長い場合に、待機状態を解除するように一の搬送車を制御する制御手段(370)とを備える。
(もっと読む)
搬送車システム
【課題】コントローラの演算量を極端に増加させることなく、高い搬送効率を実現する搬送車システムを提供する。
【解決手段】搬送車システム1は、少なくとも1つの周回走行路5と、周回走行路5を一方通行で走行する複数の搬送車3と、周回走行路5に沿って配置され複数の搬送車3に荷物を供給するための複数の出庫ポート15と、搬送車3への搬送割付を行う搬送車コントローラとを備えている。搬送車コントローラは、複数の出庫ポート15を1つのグループとして認識し、グループ内の出庫ポート15から荷つかみ要求があった場合に、搬送車3へグループの上流側にあるポイントまでの走行指令を割り付け、ポイントに到着した搬送車3に順番に、グループ内の下流側の荷つかみ要求のあった出庫ポート15での搬送指令を割り付けていく。
(もっと読む)
搬送システム
【課題】搬送システムにおいて、搬送車の走行を好適に制御し、効率的な搬送を可能とする
【解決手段】搬送システムは、軌道(100)と、軌道上を夫々走行する複数の搬送車(200)と、複数の搬送車のうち一の搬送車を被搬送物(400)の搬送元に呼び寄せる搬送予告を行う搬送予告手段(310)と、一の搬送車以外の他の搬送車における走行状態の変化を検出する変化検出手段(320,360)と、一の搬送車とされた第1搬送車(200a)及び搬送元(500a)、並びに走行状態の変化が検出された第2搬送車(200b)の位置を夫々検出する位置検出手段(330)と、第2搬送車が第1搬送車と比べて搬送元に近い場合に、第1搬送車に対する搬送予告を解除すると共に、第2搬送車に搬送予告を行うように搬送予告手段を制御する制御手段(340)とを備える。
(もっと読む)
自走移動体及び自走移動体の目的位置設定方法
【課題】
荷降ろしを行う際の車体の停止位置と姿勢とを、実際の環境内で教示可能な搬送車の構築を目的とする。
【解決手段】
ユーザが、ジョイスティックを用いて搬送車を操縦し、搬送車に備わるレーザー距離センサにより得られる環境の幾何データと、荷降ろし位置の設定に相当するジョイスティックのボタン押し下げのデータとを収集していく。これにより得られる時系列の幾何データをマッチングしていくことで、センサによる計測開始時を基準として各幾何データの位置・姿勢が求められる。この各幾何データについて、荷降ろし位置設定に相当するボタンの押し下げデータと関連付けられているかを調べ、関連付けられている場合はその幾何データの位置と姿勢を搬送車の荷降ろし位置・姿勢として算出する。
(もっと読む)
ロボットシステム
【課題】
大量で、かつ、物流量が大幅に変動する物品を取扱う搬送システムにおいて、物流量が変動しても、フレキシブルに、常に効率良く搬送できるシステムを構築することが目的である。
【解決手段】
上記目的を達成するため、荷物を搭載する台車と、台車が搬送待機状態であることを認識する第1のロボットと、搬送待機状態の台車を設定された場所まで搬送する第2のロボットを備え、第1のロボットと第2のロボットが連動して走行することにより、解決できる。作業者により出荷先別に物品を搭載した台車が搬送待機場所に配置されると、第1のロボットは距離センサの情報からその台車が搬送待機状態であることを認識する。第1のロボットに連動することで、第2のロボットはその台車を指定された出荷先まで搬送する。第1のロボットが主に周囲環境の状況把握を行うことを役割とし、第2のロボットが台車を連結して搬送することを役割とすることにより、安全性を確保しながら、フレキシブルで、かつ、高効率の輸送を実現できる。
(もっと読む)
搬送システム及び搬送システム用プログラム
【課題】搬送制御負荷の軽減を図りながらも、制御が複雑になることを抑制することができるとともに設計の自由度を図ることができる搬送システム及び搬送システム用プログラムを提供する。
【解決手段】複数のコントローラC1,C2に同一の走行制御用データをそれぞれ記憶させるデータ記憶手段18と、搬送経路中の全てのステーションの位置情報を複数のコントローラC1,C2にそれぞれ記憶させるステーション位置記憶手段と、搬送車を走行させるための搬送経路を決定する2つのステーションを対とする複数の搬送経路情報を複数のコントローラC1,C2にそれぞれ割り当てて記憶させる割り当て手段14と、選択された2つのステーションの位置情報から搬送経路情報を取得し、複数のコントローラの中から取得した搬送経路情報が割り当てられたコントローラを特定するためのコントローラ特定手段15とを備えた。
(もっと読む)
搬送システム及び搬送車
【課題】例えば半導体装置製造用の各種基板等が収容された容器等の被搬送物を、合流箇所を含む軌道上で搬送する搬送システムにおいて、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働する。
【解決手段】搬送システム(100)は、軌道(1)と、複数の搬送車(3)と、軌道上における合流箇所を含む所定範囲内へ、複数の搬送車のうち一の搬送車が軌道の一部を介して進入した場合に、所定範囲内へ、複数の搬送車のうち他の搬送車が軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段(7,9)とを備える。進入制御手段は、進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、一の搬送車の停止位置を基準として他の搬送車が一の搬送車に衝突するか否かを判定し、他の搬送車が衝突しないと判定されると、進入禁止信号を解除する。
(もっと読む)
移動ロボットおよび移動ロボット制御システム
【課題】高価なセンサを用いることなく、移動ロボットの周囲に存在する障害物をより効率的に検知することができる移動ロボットおよび移動ロボット制御システムを提供することである。
【解決手段】移動ロボット100は、移動ロボットを移動させる移動機構と、複数の第1の距離取得手段106とを含む。複数の第1の距離取得手段106の各々は、複数の測定方向に位置する障害物までの測定距離を取得する。複数の第1の距離取得手段106は、所定時間毎に同期して測定方向を切り替える。移動ロボットは、第1の距離取得手段の間に第1の距離取得手段の測定可能レンジよりも短い第2の距離取得手段126を含む。
(もっと読む)
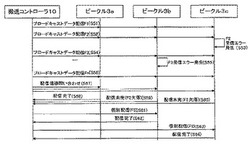
救援ロボットシステム、救援方法及び救援ロボット
【課題】
自律移動ロボットが自己位置の推定に失敗した場合、管理者による操作・介入によるリカバリでは管理者の場所への移動、救援リカバリのタイミングに問題がある。また、リカバリを高性能制御装置、ロボットのCPUの処理量及びメモリ使用量を少なくして救援リカバリを行う必要がある。
【解決手段】
管理サーバが自律移動ロボットのロボット情報を保持し、定期的に自律移動ロボットから位置情報を取得し、自律移動ロボットから救援の通知を受けた場合に配下のロボットに救援を指示し、救援指示を受けた救援ロボットは該当ロボットの探索を行い、被救援ロボットとの相対位置より被救援ロボットの絶対位置と方位を算出して被救援ロボットのリカバリを行う。
(もっと読む)
無人搬送車
【課題】搬送物の移載時に各移載先の載置高さが異なる場合でも搬送物を安定した状態で移載することができる無人搬送車を提供する。
【解決手段】搬送物2を載置し移載先5に受け渡す移載部4を備え、誘導路MTに沿って走行面F上を運行制御される無人搬送車1であって、無人搬送車1は、移載先5における搬送物移載高さに応じて、移載部4における搬送物載置高さを調整する載置高さ調整部14を備える。
(もっと読む)
搬送装置
【課題】例えば半導体装置製造用の基板等が収容された被搬送物を搬送する搬送装置において、搬送効率の低下を回避しつつカーブを安定して走行する。
【解決手段】搬送装置(20)は、搬送手段(3)と、搬送手段が走行する予定経路を設定する旨を示す搬送指令を受信可能な受信手段と、予定経路を走行する際の目標速度を示す速度指令を特定する特定手段(4)と、新たに特定される新規の速度指令により示される新規の目標速度に向けて速度変更を行いつつ受信手段により新たに受信される新規の搬送指令により示される新規の予定経路を走行するものと仮定して、搬送手段の現在速度及び特定された今回の速度指令により示された今回の目標速度に基づいて、搬送手段が新規の予定経路に含まれる所定箇所に進入するまでに速度変更が完了するか否かを判定する判定手段(6)とを備える。
(もっと読む)
搬送設備
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
走行ロボット
【課題】監視巡回する走行ロボットにおいて、カーブを支障なく通り抜けるとともに、不審者でない小動物を不審者と誤認することがない走行ロボットを提供する。
【解決手段】巡回ルートのカーブにさしかかると、走行ロボットはカーブ入り口標識を検出し、レーダを起動させ進行方向の左右にレーダ波を送出する。このレーダ波の反射によって左右の通り抜け可否を判断し、進行方向を変える。また焦電センサで小動物らしき熱源を検出したら、走行ロボットは搭載しているレーダとカメラを起動しこの情報を無線で警務者に送出する。警務者は小動物であると判断したら走行ロボットにレーダの停止と警報をオフする命令を送出する。
(もっと読む)
移動体の制御システム、制御装置、及び移動体
【課題】移動経路の変更の自由度を確保しつつ、目的地まで移動体を自律的に移動させること。
【解決手段】複数のRFIDタグ50の配列によって形成される経路上を移動するロボット200と、ロボット200の経路上の移動方向又は移動量を制御するコントローラ100と、を備え、ロボット200は、経路上の移動時に複数のRFIDタグ50夫々から取得するRFIDタグ50同士を識別させる識別値をコントローラ100に送信し、コントローラ100は、ロボット200からの識別値の受信に応じて、識別値に対して予め設定されたロボット200を目的地まで移動させるための走行データをロボット200に送信する。移動経路の変更に応じて走行データの内容を変更することで、移動経路の変更に対応しつつ目的地までロボット200を自律的に移動させることができる。
(もっと読む)
走行車システム
【構成】 コントローラから走行車に搬送指令を割り付け、物品の搬送と受け渡しとを行う。コントローラは、走行車からの搬送指令の完了報告の受信前に、次の移動先を指示し受け渡しを指示しない移動予約を走行車に送信し、完了報告を受信すると次の搬送指令を送信する。走行車は搬送指令を完了するとコントローラへ報告し、移動予約を受信すると、実行中の搬送指令の完了後に移動予約で指示された移動先へ走行する。
【効果】 走行車がコントローラからの指令を待って停止する期間が無く、また走行車が搬送指令を2重に持つタイミングが生じない。
(もっと読む)
自律型ロボット及び自律型ロボットを複数用いる協調作業システム
【課題】作業領域での作業時間を考慮し、複数の自律型ロボットが協調して作業する自律型ロボット及び自律型ロボットを複数用いる協調作業システムを提供し、作業効率を最適化する。
【解決手段】複数の雑草群Zが存在する圃場Hにて雑草群Zを順に移動して除草作業を実施する除草ロボット10は、現在位置から雑草群Zまでの距離を評価距離とし、前記雑草群Zの雑草面積とし、雑草群Zと、該雑草群Zの最も近い、他の除草ロボット10が除草作業を実施している雑草群Zとの距離を分散距離とし、前記評価距離のみ正負の異なる係数を用いる該評価距離と前記雑草面積と前記分散距離との線形結合を評価値とし、該評価値に基づいて次に除草作業を実施する除草作業領域である雑草群Zを選定する。
(もっと読む)
41 - 60 / 118
[ Back to top ]