
Fターム[5H301LL07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 衝突防止 (2,071) | 減速によって衝突を回避するもの (76)
Fターム[5H301LL07]に分類される特許
1 - 20 / 76
走行制御装置および車両
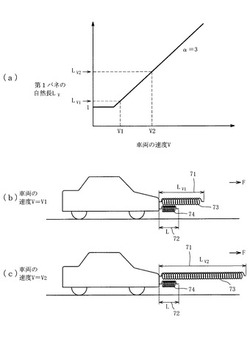
【課題】物体の衝突を回避しつつ、車両を物体に近づけることができる走行制御装置および車両を提供すること。
【解決手段】車両1の速度が大きいほど長い第1バンパー距離71を設定する。これにより、車両1が低速走行する場合には高速走行する場合に比較して、第1バンパーより71が短いので、物体80が近くまで迫った場合に第1反発力F1が仮想的に車両に加えられる。すなわち、車両1が低速走行する場合、車両1と物体とが遠い間は、第1反発力F1が車両1に加えられないか、若しくは、小さな第1反発力F1が車両1に加えられる。よって、車両1を物体80に近づけることができる。
(もっと読む)
車両用障害物検出装置及びそれを用いた車両

【課題】走路上の障害物を検出する障害物検出装置を提供する。
【解決手段】
車両前方を撮影する赤外線カメラ2と、車両前方を撮影するステレオカメラ3と、赤外線カメラ2により撮影された赤外線画像を基に走路を特定する走路特定部5と、ステレオカメラ2により撮影された各画像に基づいてステレオ画像を作成するステレオ画像作成部6と、走路特定部5により特定された走路とステレオ画像とに基づいて、走路上の障害物を特定する障害物検出部7とを備える。
(もっと読む)
衝突防止機能付き車両
【課題】障害物との衝突を防止しつつ、必要以上に車両の運動が制限されないことを可能とする。
【解決手段】 この車両は、入力された目標速度及び目標進行方向で車体50が所定時間だけ移動するときに車体が通過すると予測される車体通過予測領域と、障害物検知部で検出された障害物の位置とから、車体と障害物とが衝突するか否かを判定する。そして、車体と障害物とが衝突すると判定されるときは、入力部への入力に応じた目標速度及び目標進行方向の少なくとも一方を修正する。車体通過予測領域は、予め設定された車体モデル70に基づいて算出され、その車体モデル70は入力された目標速度及び目標進行方向に応じて変化する。
(もっと読む)
自律カバレッジロボットナビゲーションシステム
【課題】ナビゲーションビーコンにより自律モバイルロボットを隣接する有界領域に移動可能とする。
【解決手段】ナビゲーションビーコンは、第1の有界領域と、隣接する第2の有界領域との間のゲートウェイ内に配置されたナビゲーションビーコンによって、ゲートウェイマーキングエミッションを伝送するように構成されたゲートウェイビーコンエミッタを有し、自律カバレッジロボットは、ビーコンエミッションに応答するビーコンエミッションセンサ(104、106)と、ゲートウェイマーキングエミッションの検出に応えてロボットの方向を変える清掃モードで、ロボットを第1の有界領域周辺にて動かすように構成された駆動システムとを含み、駆動システムは、マイグレーションモードにおいて、ゲートウェイを通って第2の有界領域へとロボットを動かす。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、分岐点及び合流点を通過する台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線を有する軌道と、軌道に支持されると共に案内されて走行する複数の台車とを備える。複数の台車の各々は、互いに周波数の異なる複数の信号を夫々発信可能な発信手段910,920と、発信手段から発信された複数の信号を誘導線へと夫々送信する送信手段810,820と、誘導線を介して伝達された複数の信号を夫々受信可能な受信手段710,720と、受信手段において受信された信号の種類に基づいて、台車の減速若しくは停止、又は走行の続行を判定する判定手段955と、判定手段における判定結果に応じて台車の走行を制御する制御手段960とを有している。
(もっと読む)
搬送用走行体の走行制御方法
【課題】走行速度可変の自走式搬送用走行体1を作業区間WAに一定の作業速度VLまで減速させた状態で進入させること。
【解決手段】各搬送用走行体1には、前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14が設けられ、作業区間WAの上手側走行経路中には、計測起点P1が設定され、作業区間WAへ高速で接近する後ろ側搬送用走行体1Zとその前方の作業速度VLで走行する前側搬送用走行体1Yには、計測起点P1からの走行距離に相当する現在位置情報を持たせ、後ろ側搬送用走行体1Zでは、自体の現在位置情報と前記データ通信手段を介して受け取った前側搬送用走行体1Yの現在位置情報とに基づいて前側搬送用走行体1Yとの間の距離を演算させると共に当該距離の漸減変化に基づいて減速制御を行わせ、前記距離が設定値に達したドッキング完了時に後ろ側搬送用走行体1Zが作業速度VLで自走しているように制御する。
(もっと読む)
無人搬送車および走行制御方法
【課題】作業番地への停止において、精度の高いコンベアへの横付けが可能な無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】コンベア12に設置されている反射板11へ光を照射し、反射板11から反射した信号光を受光することによって物体の存在を検出する光電センサを、無人搬送車1の側面前後にそれぞれ1つづつ備えるとともに、無人搬送車1とコンベア12とを検知する手段を備え、無人搬送車1の側面前後に備えられている光電センサの双方が反射板から反射した信号光を受光すると、操舵輪をコンベア12方向へ操舵し、無人搬送車1とコンベア12との距離が所定の距離となるまで無人搬送車1をコンベア12方向へ走行させることを特徴とする。
(もっと読む)
走行車
【課題】経路上に障害物が存在し、かつ、即座に当該障害物が除去されない状況が生じた場合であっても、荷物の搬送等の作業を効率よく行うことのできる走行車を提供すること。
【解決手段】障害物センサ110と、障害物センサ110による検知結果に応じて、走行100車に障害物を回避するための第一の回避動作を行わせるコントローラ120と、障害物の位置を示す位置情報と、第一の回避動作における走行車の左右方向の回避幅を示す回避幅情報とを記憶する記憶部130とを備え、コントローラ120は、(a)障害物センサ110が、位置情報に示される位置における障害物の存在を、走行車100と障害物との距離が第一の距離以下である時点において検知した場合、(b)走行車100と障害物との距離が第二の距離に至る前に、走行車100に、記憶部130に記憶されている回避幅情報を用いた第二の回避動作を開始させる走行車100。
(もっと読む)
自律型カバレッジロボット
【課題】移動中に遭遇する障害物を回避することが可能な自律型カバレッジロボットを提供することを目的とする。
【解決手段】自律カバレッジロボットであって、方位設定および速度設定に従ってロボットを操縦するように構成された駆動システムと、前方向における障害物とのロボットの衝突に応答する衝突センサと、ロボット前方における潜在的な障害物に応答する近接センサと、を備え、駆動システムは、方位設定に従ってロボットを前進させ続ける間に、潜在的な障害物の検出を示す近接センサからの信号に応答して、速度設定を低減するように構成され、駆動システムは、障害物との接触を示す衝突センサから、および障害物の周囲を追従し、障害物からロボットを離れるように向けるための近接センサから受け取った信号に応答して、方位設定を変更するように構成されることを特徴とする。
(もっと読む)
移動体
【課題】ランドマークを誤認識する可能性を低減することが可能な移動体を提供する。
【解決手段】予め設定された測定領域に存在するランドマーク25までの距離及び角度を計測するレーザレンジファインダ12と、前記測定領域を決定する測定領域決定部45を有し、レーザレンジファインダ12の計測結果に基づいて予め教示された走行経路上を走行するように走行を制御する制御装置34とを備える。
(もっと読む)
物品搬送装置
【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
ゴルフカートおよびゴルフカート走行制御システム
【課題】円滑な移動が可能なゴルフカートおよびゴルフカート走行制御システムを提供することである。
【解決手段】電磁誘導線81上を2台のゴルフカート1A,1Baが同じ方向に順に走行する場合、ゴルフカート1Aは、1つ前のゴルフカート1Baからのカート情報を受信しかつ追突防止信号を受信する。その場合、ゴルフカート1Aは徐行または停止する。ゴルフカート1A,1Bbが電磁誘導線82,83上を互いに逆方向に走行する場合、ゴルフカート1Aが、1つ前以外のゴルフカート1Bbからのカート情報を受信し、かつ追突防止信号を受信する。その場合、ゴルフカート1A,1Bbは走行を継続する。
(もっと読む)
走行台車システム
【課題】 走行台車間の車間距離を短くできるようにし、かつ障害物の検出に死角が生じないようにする。
【構成】 障害物までの距離と障害物の方位を検出する障害物センサを走行台車に設ける。走行台車の走行ルートのマップを記憶し、障害物が存在すると走行台車の減速が必要になる検出エリアを、マップから走行台車の位置に基づき繰り返し作成する。障害物センサが検出した障害物中で、検出エリア内のものを検出し、検出した障害物との干渉を防止するように走行台車を減速制御する。
(もっと読む)
無人移動体の制御方法及び無人移動体
【課題】自律移動可能な半自律走行車を遠隔操縦するに際して、一旦停止させたり大幅に減速させたりすることなく、障害物の回避動作や交差点での進路変更を安全に行わせることが可能である無人移動体の制御方法及び無人移動体を提供する。
【解決手段】測距データから移動経路を作成して、移動経路上を自律して移動可能な半自律走行車Bの制御方法であって、移動中に新規操舵指令及び新規速度指令を得た時点で、これに基づく新規移動経路T上で且つ現在速度及び新規速度のうちの大きい方の移動速度に対応する制動距離内に障害物Dが有るか否かを判定し、障害物Dが有る場合には、新規移動経路Tの横に障害物回避経路Rを設定すると共に回避経路R上の障害物Dの有無を判定し、以降、障害物Dのない障害物回避経路Tが設定されるまで上記処理を繰り返し、障害物回避経路Tを設定し得ない場合には、半自律走行車Bを停止させる。
(もっと読む)
自動搬送車
【課題】簡易な手法により適切な検出エリアを設定して障害物の確認を行う自動搬送車を提供すること。
【解決手段】走行位置及び進行方位を算出する演算手段24と、その走行位置や進行方位を基に予め備えた走行ルート情報に従った走行制御を行う走行制御手段25とを有するものであって、障害物の確認を行う検出エリアを設定する検出エリア設定手段27と、検出エリア内に物体が存在するか否かを検出する物体検出手段26とを備え、物体検出手段からの障害物情報に基づき走行制御手段25が徐行や停止の走行制御を行うようにしたものであり、検出エリア設定手段は27、走行位置が直線経路であるかカーブ経路であるかを確認し、直線経路であれば所定の計算式に基づいて算出した範囲を検出エリアA,B,Cとし、カーブ経路であれば予め用意された所定数のエリアパターンから選択した範囲を検出エリアDとするようにした自動搬送車。
(もっと読む)
無人搬送車、および、その走行制御方法
【課題】無人搬送車の走行制御において、走行速度により目標走行経路と、停止範囲および減速範囲を決定することにより、安全性を高めた走行をおこなう。
【解決手段】地図データと、走行速度が設定された経路データとを保持し、レーザにより周辺環境の状況を計測して、地図データと計測されたデータとをマッチングして、現在位置を求める無人搬送車において、走行速度に応じて、走行速度が大きくなればなるほど大きくなるように、移動先距離を決定する。そして、基準点から移動先距離にあたる経路上の点を、移動先位置として、その移動先位置に向かって走行させる。また、その走行速度に応じて、減速範囲と、停止範囲を定めて、障害物をそれらの範囲内で検知したときには、それぞれ無人搬送車を減速または停止するように制御する。この減速範囲と停止範囲も、走行速度に応じて広くなるようにとる。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
自律移動体、速度設定装置および速度設定プログラム
【課題】
自律移動体の走行速度をスムーズに変化させることができる自律移動体、速度設定装置および速度設定プログラムを提供することを目的とする。
【解決手段】
自律移動体100は、移動環境内の所定範囲を計測する視覚センサ2と、視覚センサによる計測結果から所定範囲内の実際に計測された通路面積を算出する第1の通路面積算出部3と、移動体100の自己位置を推定する自己位置推定部4と、所定範囲に存在する固定された障害物の位置を示す参照マップと自己位置とから算出された通路面積を算出する第2の通路面積算出部5と、第1の通路面積算出部3と第2の通路面積算出部5とから算出された各通路面積の面積比を算出する面積比算出部6と、面積比から移動体100の速度を設定する速度設定部8と、を備える自律移動体である。これにより、急な速度変化を防止し、スムーズな減速が可能である。
(もっと読む)
移動ロボット
【課題】安全性向上のための近接センサを走行制御にも用いて移動ロボットの使い勝手を向上させる。
【解決手段】移動ロボットの本体を移動する移動機構と、複数の方向から移動機構に接近する物体を検知する近接センサと、近接センサの信号により、移動機構を制御する制御部と、を備え、移動ロボットが待機状態にあり、かつ、近接センサが移動ロボットの進行方向と異なる方向の物体を検知したとき、制御部が進行方向に移動機構を移動させる。
(もっと読む)
バッテリーロコの前方監視方法
【課題】スキャン速度が速いので障害物検知のタイミングが適切であり、振動や傾斜に対しても十分対処できるバッテリーロコの前方監視方法を提供する。
【解決手段】連結する先頭車両の台車1に、レーザースキャン1回(前面180度)が0.1秒以下であるレーザースキャン装置2を搭載し、レーザースキャン装置2に接続する警報発信装置3と、警報器5およびバッテリーロコ制御装置6とに接続する警報発信装置4とを通信させ、前記レーザースキャン装置2により前方の障害物を自動検知し、そのレーザースキャンデータ信号にて段階的に警報を発報し、バッテリーロコの制動制御を行う。
(もっと読む)
1 - 20 / 76
[ Back to top ]