
Fターム[5H301LL14]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 衝突防止 (2,071) | 対象間の距離に基づいた処理を行うもの (183)
Fターム[5H301LL14]に分類される特許
1 - 20 / 183
推定装置、推定方法、および推定プログラム
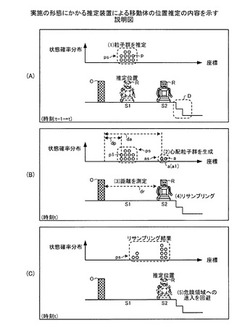
【課題】移動体が特定の領域に位置する場合の推定精度の向上を図ること。
【解決手段】推定装置は、粒子フィルタを用いたシミュレーションにより、直前の移動体の状態を示す粒子群から、現在の移動体の状態を示す粒子群psを推定する。次に、推定装置は、推定された現在の移動体の状態を示す粒子群psに加えて、危険領域Dの近傍領域の状態を示す心配粒子群asを生成する。そして、推定装置は、推定された粒子群psと生成された心配粒子群asとの各粒子の尤度に基づいて、粒子群psをリサンプリングする。これにより、推定装置は、移動体の真の位置が危険領域の近傍領域にある場合に、移動体の位置の推定精度の向上を図ることができる。
(もっと読む)
走行制御装置および車両

【課題】衝突回避対象の物体の種別に応じて、安全に物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】対象物の種別に応じて、その対象物に接触されているバネ73のバネ定数を設定し、そのバネ定数を使用して、収縮したバネ73から車両に加えられる反発力を算出する。これにより、対象物の種別に応じて適宜バネ定数を定義することにより、対象物の存在によって車両に加えられる反発力Frを、対象物の種別に合わせて大きくしたり、逆に、小さくしたりすることができる。よって、優先的に衝突を回避しなければならない物体については、より強い反発力が車両に加えられるようにすることができるので、衝突回避対象の対象物の種別に応じて、安全に物体の衝突回避を行うことができる。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
走行制御装置および車両
【課題】車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両を提供すること。
【解決手段】仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー領域71の適用仮想バンパー幅を基準形状の仮想バンパー幅(以下「基準仮想バンパー幅」と称す)である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。
(もっと読む)
移動ロボット
【課題】距離計測部を用いて高精度に位置決めを行う。
【解決手段】周辺物体までの距離と方向を計測する距離計測部3と、前記距離計測部が計測した周辺物体までの距離と方向を用いて目標物体の停止地点に対する当該移動ロボットの相対位置と相対方向を検出する相対姿勢検出部4と、前記相対位置と前記相対方向を用いて、前記移動機能部を制御する制御部5と、を備え、前記相対姿勢検出部は、前記目標物体を特定する線分を求めることにより、前記相対位置と前記相対方向を検出する。
(もっと読む)
移動体の走行制御装置、走行制御方法、走行制御プログラム
【課題】移動体が外部環境との衝突を回避しながら走行するのに必要となる計算コストを抑制する技術を提供する。
【解決手段】自立走行ロボット1の走行を制御する走行制御部6は、進行方向側に存在する外部環境と、基準点Aと、の間の距離を計測して複数の距離データを生成する距離データ生成部60と、複数の距離データのうち、基準点Aから見て進行方向右側に分類されるものであって、最も小さい距離データを右側最短距離データDminRとして抽出し、複数の距離データのうち、基準点Aから見て進行方向左側に分類されるものであって、最も小さい距離データを左側最短距離データDminLとして抽出する、最短距離抽出部61と、自立走行ロボット1が外部環境との衝突を回避するのに必要となる旋回角θRAを決定する旋回角決定部62と、を備える。
(もっと読む)
搬送車システムのシミュレーションシステムとシミュレーション方法
【課題】
共通のシミュレーション結果に対し、複数の端末で各々の観点から解析を行う。
【構成】
処理装置間でワークを搬送する搬送車システムをシミュレーションする。搬送車システムでの複数の仮想的な搬送車の走行をシミュレーションし、シミュレーションにより得られたデータと搬送車システムの背景画像とを複数の端末へ送信する。各端末は、データを画像として表示する搬送車システム内のエリアと時間の範囲とを端末毎にユーザが指定し、指定された範囲内のデータを画像化すると共に搬送車システムの背景画像と合成し、合成された画像をモニタに表示する。
(もっと読む)
自律移動体
【課題】自律移動体が移動する障害物を避けながら移動する際に、障害物に接近しすぎることがなく、障害物が移動する流れに沿って移動しながら目的地に到達する経路を探索する自律移動体を提供する。
【解決手段】自律移動体と移動障害物の間に仮想粘性力と仮想斥力が作用するとし、経路探索技術で用いる移動コストに仮想粘性力と仮想斥力を含める。また、分岐点を仮に選択して移動コストを計算する際には、その分岐点を通過する時点における移動障害物の位置と速度を予測して仮想粘性力と仮想斥力を計算する。移動障害物に接近しすぎると移動コストが増大し、移動障害物の流れに沿って移動すると移動コストが低下することから、移動障害物に接近しすぎることがなく、しかも移動障害物の流れに沿って移動する経路が探索される。
(もっと読む)
移動体の位置・姿勢推定システム
【課題】走行開始時の自律移動ロボットの位置・姿勢の推定にかかる時間を短縮し、高速応答の走行制御を可能とする。
【解決手段】距離センサ3の測定結果から得られた距離和データに対して、これに近似した距離和地図データ群内の距離和データを検索し、その結果に基づいて自律移動ロボットの位置・姿勢を推定するマッチング処理を行う。このとき、マッチング処理の探索条件を複数用意しておく。第1の探索条件は、走行履歴に含まれる距離和地図データの中で自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。第2の探索条件は、予め設定した経路上での自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。第3の探索条件は、通路内での位置・姿勢の距離和地図データとする。最終の探索条件は、地図データ内で自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。
(もっと読む)
干渉回避制御装置
【課題】干渉チェックの見落としによる機器同士の干渉発生をより確実に防ぐことのできる干渉回避制御装置を得ること。
【解決手段】干渉回避制御装置は、補間制御周期での停止予定位置に基づく干渉チェックに見落としが生じうるか否かを判定する第1判定手段11と、干渉チェックに見落としが生じうると判定された見落とし区間において、1補間制御周期を整数で割った周期で停止指令を出した場合の停止予定位置を算出する第1計算手段1と、停止予定位置に基づいて動作機器と他の機器との機器間距離を算出する第2計算手段2と、3点以上の機器間距離に基づいて近似曲線を算出する第3計算手段3と、近似曲線に基づいて見落とし区間における機器間距離の最小値を算出する第1最小値算出手段4と、動作機器と他の機器とが近接した場合の近接距離と最小値とを比較して干渉の有無を判定する第2判定手段5と、を備える。
(もっと読む)
歩行者の軌跡を予測して自己の回避行動を決定するロボット
【課題】周囲の通行への影響を抑制しながら歩行者と安全にすれ違う。
【解決手段】自律的に行動するロボットRは、自己とすれ違う歩行者Thの軌跡を示す歩行者モデルを記憶しており、自己および歩行者Thの位置を検出して、検出結果および歩行者モデルに基づいて自己とすれ違う歩行者Thの軌跡を予測し、予測結果に応じて自己の回避行動を決定する。
(もっと読む)
自律移動装置
【課題】自律移動装置において、既知の障害物には所定の離間距離を保って移動し、未知の障害物には所定の離間距離よりも大きい離間距離を保って移動することを可能とする。
【解決手段】自律移動装置10は、障害物候補が地図情報141に含まれている場合には、その障害物侯補が自己の周囲に設定された第1の領域に入らないように移動し、障害物候補が地図情報141に含まれていない場合には、その障害物候補が自己の周囲の第1の領域よりも広い第2の領域に入らないように移動する。ここで、通常の離間距離よりも障害物候補に接近可能となる接近可能領域が設けられている。これにより、自律移動装置10は、壁等の既知の障害物には接近して移動し、人や一時的に置かれた未知の障害物には広めの離間距離を保って移動することが可能となる。また、目標地点が接近可能領域内にある場合には、目標地点付近にある障害物に接近して移動することが可能となる。
(もっと読む)
搬送用走行体の走行制御方法
【課題】走行速度可変の自走式搬送用走行体1を作業区間WAに一定の作業速度VLまで減速させた状態で進入させること。
【解決手段】各搬送用走行体1には、前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14が設けられ、作業区間WAの上手側走行経路中には、計測起点P1が設定され、作業区間WAへ高速で接近する後ろ側搬送用走行体1Zとその前方の作業速度VLで走行する前側搬送用走行体1Yには、計測起点P1からの走行距離に相当する現在位置情報を持たせ、後ろ側搬送用走行体1Zでは、自体の現在位置情報と前記データ通信手段を介して受け取った前側搬送用走行体1Yの現在位置情報とに基づいて前側搬送用走行体1Yとの間の距離を演算させると共に当該距離の漸減変化に基づいて減速制御を行わせ、前記距離が設定値に達したドッキング完了時に後ろ側搬送用走行体1Zが作業速度VLで自走しているように制御する。
(もっと読む)
自走式装置の位置の決定方法
【課題】電動駆動走行車(3)を有する自走式装置(1)の位置の決定方法を提供する。
【解決手段】装置(1)が障害物検出装置(A)を備え、さらに占有された予め計算された装置(1)の最初の位置からの多数の可能な位置および方位(パーティクル(小部分)6)が計算され、および装置(1)に対応した走行後の次に占有される第2の位置に関して、光学ユニットの測定結果に基づき確率を考慮した所定の選択アルゴリズムに従って、予め発生されたパーティクル(6)の1つが装置(1)の新たな位置として占有される自走式装置(1)の位置の決定方法である。
(もっと読む)
移動体システム
【課題】移動体システムにおいて、移動体の干渉を移動開始前に判断するときの演算量を減らす。
【解決手段】自動倉庫1において、第1移載部32A及び第2移載部32Bは、平面内を移動可能に配置されている。メインコントローラ53は、第1移載部32Aが移動を開始する前に、第1移載部32Aの移動予定経路における干渉を確認する。メインコントローラ53は、ステップ分割部74と、ステップ算出部75と、干渉判断部76とを有している。ステップ分割部74は、移動予定経路における時間又は距離を複数のステップに分割する。ステップ算出部75は、両移載部の相互距離、移動向き、速度を考慮することで、干渉が生じる可能性がないステップを算出する。干渉判断部76は、第1移載部32A及び第2移載部32Bの位置計算をすることで干渉の有無を判断するものであり、干渉が生じる可能性がないステップについての両移載部の位置計算を省略する。
(もっと読む)
全方向移動型電動車両およびその制御方向
【課題】障害物回避動作を行う全方向移動型電動車両は、操作した方向と異なる方向に動作するため、操作者に対し強い違和感や不安感を抱かせるという問題がある。
【解決手段】車体部14と、操作者が操作した操作方向および操作量を検出する車体部14に設けた操作入力部13と、障害物までの距離および方向を検出する障害物センサ18と、操作入力部において検出される操作方向および操作量により操作力を算出する操作力推測部17と、障害物センサ18が検出した障害物までの距離に反比例し、かつ、障害物と反対方向に作用する仮想斥力を算出する仮想斥力算出部19と、操作力および仮想斥力の和より合力を算出する合力算出部20と、車体部14を操作力の方向から合力の方向へ回転させながら、合力の方向へ移動するよう制御する制御部21とを備えた構成である。
(もっと読む)
無人搬送車および走行制御方法
【課題】障害物を回避する無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】経路データ上に、回避距離を予め設定しておき、進行方向前方に障害物1701を検知すると、回避距離だけ横行した後、前方へ走行することを特徴とする。また、回避距離は、回避方向と共に経路データにおける区間毎に設定されていてもよい。さらに、回避経路を走行中に取得した計測データに、障害物1701が検出されなくなったときから、車長+所定距離だけ前方に移動した後、元の経路1702に戻る。
(もっと読む)
移動ロボットの遠隔操縦のための衝突防止装置及び方法
【課題】遠隔操縦のための衝突防止装置及び方法に係り、ユーザに移動ロボットの移動に関する情報を容易に伝達する。
【解決手段】移動ロボットに装着されたカメラで撮影した映像を所定の時間差で保存して比較してオプティカルフローを計算し、FOEを計算する。また、移動ロボットの移動速度及び移動方向についての情報を獲得する。計算されたFOEと、移動速度及び移動方向と、を利用して、移動ロボットの走行方向に存在する障害物を感知し、感知された障害物に衝突するまでに要するTOCを計算し、そのTOCを利用して障害物に移動ロボットが衝突する可能性がある衝突予想領域を計算する。その計算結果に基づいて、画面に表示される衝突予想領域にマッピングするカラーの情報を生成する。具体的には、計算されるTOCの値によってカラーの色調を調整し、TOCの値が小さければカラーの点を濃くし、TOCの値が大きければカラーの点を薄くする。
(もっと読む)
自律型カバレッジロボット
【課題】移動中に遭遇する障害物を回避することが可能な自律型カバレッジロボットを提供することを目的とする。
【解決手段】自律カバレッジロボットであって、方位設定および速度設定に従ってロボットを操縦するように構成された駆動システムと、前方向における障害物とのロボットの衝突に応答する衝突センサと、ロボット前方における潜在的な障害物に応答する近接センサと、を備え、駆動システムは、方位設定に従ってロボットを前進させ続ける間に、潜在的な障害物の検出を示す近接センサからの信号に応答して、速度設定を低減するように構成され、駆動システムは、障害物との接触を示す衝突センサから、および障害物の周囲を追従し、障害物からロボットを離れるように向けるための近接センサから受け取った信号に応答して、方位設定を変更するように構成されることを特徴とする。
(もっと読む)
自律移動体
【課題】干渉する可能性のある障害物が存在する場合に、停止行動又は退避行動を状況に応じて適切に行うことが可能な自律移動体を提供することを目的とする。
【解決手段】自律移動体1は、レーザレンジセンサ12と電子制御装置20とを備える。電子制御装置20は、自機の大きさD2を記憶する記憶部22と、自機が移動可能な領域である通路95の幅方向の大きさを示す空間サイズD1を特定する幅特定部27と、障害物情報に基づき、路面において移動目標方向72と略直交する方向について、干渉障害物66の大きさD8を算出する算出部23と、空間サイズD1、自機の大きさD2、及び干渉障害物66の大きさD8に基づいて、停止行動又は退避行動を選択する行動選択部24と、停止行動が選択された場合、自機を停止させ、退避行動が選択された場合、自機を退避させる移動制御部25とを備える。
(もっと読む)
1 - 20 / 183
[ Back to top ]