
Fターム[5H301LL16]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 衝突防止 (2,071) | 対象の移動方向に基づいた処理を行うもの (33)
Fターム[5H301LL16]に分類される特許
1 - 20 / 33
走行制御装置および車両
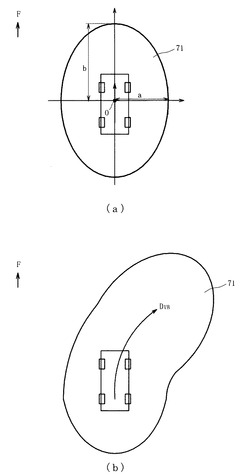
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
自律移動体

【課題】自律移動体が移動する障害物を避けながら移動する際に、障害物に接近しすぎることがなく、障害物が移動する流れに沿って移動しながら目的地に到達する経路を探索する自律移動体を提供する。
【解決手段】自律移動体と移動障害物の間に仮想粘性力と仮想斥力が作用するとし、経路探索技術で用いる移動コストに仮想粘性力と仮想斥力を含める。また、分岐点を仮に選択して移動コストを計算する際には、その分岐点を通過する時点における移動障害物の位置と速度を予測して仮想粘性力と仮想斥力を計算する。移動障害物に接近しすぎると移動コストが増大し、移動障害物の流れに沿って移動すると移動コストが低下することから、移動障害物に接近しすぎることがなく、しかも移動障害物の流れに沿って移動する経路が探索される。
(もっと読む)
自走式装置の位置の決定方法
【課題】電動駆動走行車(3)を有する自走式装置(1)の位置の決定方法を提供する。
【解決手段】装置(1)が障害物検出装置(A)を備え、さらに占有された予め計算された装置(1)の最初の位置からの多数の可能な位置および方位(パーティクル(小部分)6)が計算され、および装置(1)に対応した走行後の次に占有される第2の位置に関して、光学ユニットの測定結果に基づき確率を考慮した所定の選択アルゴリズムに従って、予め発生されたパーティクル(6)の1つが装置(1)の新たな位置として占有される自走式装置(1)の位置の決定方法である。
(もっと読む)
移動体システム
【課題】移動体システムにおいて、移動体の干渉を移動開始前に判断するときの演算量を減らす。
【解決手段】自動倉庫1において、第1移載部32A及び第2移載部32Bは、平面内を移動可能に配置されている。メインコントローラ53は、第1移載部32Aが移動を開始する前に、第1移載部32Aの移動予定経路における干渉を確認する。メインコントローラ53は、ステップ分割部74と、ステップ算出部75と、干渉判断部76とを有している。ステップ分割部74は、移動予定経路における時間又は距離を複数のステップに分割する。ステップ算出部75は、両移載部の相互距離、移動向き、速度を考慮することで、干渉が生じる可能性がないステップを算出する。干渉判断部76は、第1移載部32A及び第2移載部32Bの位置計算をすることで干渉の有無を判断するものであり、干渉が生じる可能性がないステップについての両移載部の位置計算を省略する。
(もっと読む)
搬送台車システム
【目的】 長細い荷物や平面積が広い荷物などの特殊な荷物についても、狭い通路などの特殊な環境でも、低コストで対応することができる、搬送台車システムを提供する。
【構成】 それぞれが複数のオムニホイール付きの、複数の台車を備えており、各台車は自らの情報を取得すると共に、他の台車の情報を無線で定期的に取得することにより、マスターとの同期が必要ではない事項については、各台車(マスター及びスレーブ)が自らを自律的に制御し、発進又は停止などのマスターとスレーブとの同期が必要な事項については、マスターがその発進又は停止を指示するためのスレーブ指示信号をI/Oテレコントロール通信を使用して各スレーブに送信し、各スレーブはこれに基づいてマスターに同期して発進又は停止するようにした、搬送台車システムである。
(もっと読む)
経路設定装置、経路設定方法、及びプログラム
【課題】人の現在位置を中心として移動体の経路から外すべき範囲を設定するとき、その範囲を適切に設定することができるようにする。
【解決手段】目的地情報取得部100は、目的地の位置を示す目的地情報を取得する。人情報取得部120は、移動体の周囲に位置する人の位置情報を取得するとともに、人の属性を取得する。予想範囲算出部140は、人情報取得部120が取得した位置情報及び属性に基づいて、人の予想移動範囲を算出する。移動経路算出部180は、予想移動範囲及び目的地情報を用いて移動体の移動経路を算出する。
(もっと読む)
ゴルフカートおよびゴルフカート走行制御システム
【課題】円滑な移動が可能なゴルフカートおよびゴルフカート走行制御システムを提供することである。
【解決手段】電磁誘導線81上を2台のゴルフカート1A,1Baが同じ方向に順に走行する場合、ゴルフカート1Aは、1つ前のゴルフカート1Baからのカート情報を受信しかつ追突防止信号を受信する。その場合、ゴルフカート1Aは徐行または停止する。ゴルフカート1A,1Bbが電磁誘導線82,83上を互いに逆方向に走行する場合、ゴルフカート1Aが、1つ前以外のゴルフカート1Bbからのカート情報を受信し、かつ追突防止信号を受信する。その場合、ゴルフカート1A,1Bbは走行を継続する。
(もっと読む)
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
自律移動ロボット
【課題】人の移動したい方向が不明な場合でも、自律移動ロボットの適切な移動を実現する。
【解決手段】動作決定部80及び走行制御部66は、音声認識部56の認識結果に基づいて人が自律移動ロボットを退かそうとしているか否かを判定するとともに、人物検出部60と顔検出部52の検出結果に基づいて人が移動したい方向を判定する。この判定の結果、人に自律移動ロボットを退かそうとする意志があるが移動したい方向が不明と判定された場合には、自律移動ロボットを、人から離れる方向に移動させ、自律移動ロボットが人から離れる方向に移動した後に人が動いた方向に基づいて、自律移動ロボットを人から離れる方向に移動する。
(もっと読む)
自動搬送台車の衝突事故回避システム及び自動搬送台車の衝突事故回避方法
【課題】コーナー部や出入り口等、視界の利かない通路を走行する場合であっても、未然に危険を予知して安全対策を施すことを可能にする自動搬送台車の衝突事故回避システム及び自動搬送台車の衝突事故回避方法を提供する。
【解決手段】この自動搬送台車の衝突事故回避システムでは、自動搬送台車1、2、3と人が通行する場所を、衝突事故が発生する可能性が高い危険ゾーンと、この危険ゾーンに近接した予知ゾーンとを含む複数のゾーンに分割して設定する。そして、危険ゾーンと予知ゾーンにそれぞれ設けられ、自動搬送台車1、2、3と人を検知する検知手段4、5、6、7と、予知ゾーン及び/又は危険ゾーンに侵入した自動搬送台車1、2、3及び/又は人に警報を発信するアラーム装置8、9と、検知手段4、5、6、7からの検知結果を受け、この検知結果に基づいてアラーム装置8、9に警報発信信号を送信する制御装置10とを備えている。
(もっと読む)
移動体システム及びそのデッドロック回復手法
【課題】 デッドロックからの総回復時間を最小とできるように改良した移動体システム及びそのデッドロック回復手法を提供することを目的とする。
【解決手段】 移動体を離散時間で管理する移動体システムにおいて、移動体が相互に前方の区間を塞ぎ合うことにより閉路が存在するときにデッドロックが発生したと判定し、デッドロックが発生したと判定された場合には、例外処理として、閉路を構成する移動体のいずれかを本来の走行方向とは逆向きに走行経路上を走行させる回復動作を行うに際し、閉路からの退避路候補について4つの関係を与え、回復動作の干渉を考慮する必要がある同一のデッドロック群に属するデッドロックについては、右方最短退避路、右方次最短退避路、左方最短退避路及び左方次最短退避路から選択された退避路の組み合わせに従って前記回復動作を実行するので、デッドロックからの総回復時間を最小化することができる。
(もっと読む)
接触センサ及び移動ロボット
【課題】比較的少数の接触センサで、接触の力とその方向を推測することが可能で、さらに接触部が周囲の物体を損傷するなどの危険を軽減する接触センサを提供すること。
【解決手段】本発明の接触センサは、細長い弾性材の両端に、軸と回転センサを配置し、円形にたわませた形とする。円形の弾性材に物体を接触させると、その力と接触方向に応じて弾性材が変形し、それに連動して両端の軸が回転する。両端の軸の回転角度の変化から円形の弾性材に加えられた力と向きを推測する。
(もっと読む)
自律型移動体
【課題】移動障害物のゴーストを適時に除去することにより、効率的な移動を行うことができるようにする。
【解決手段】移動領域内の測距データを取得するための測距装置31により取得した測距データに基づき、自律移動の妨げとなる障害物が移動障害物であるか否かを判定する障害物判定手段30aと、判定に係る移動障害物を含む三次元地図を作成する地図作成手段20aと、判定に係る移動障害物に対応する三次元地図上の座標位置をマーキングするマーキング手段30bと、所定の時間経過毎に、当該マーキングした三次元地図上の座標位置から当該移動障害物を消去する移動障害物消去手段20bと、移動障害物を消去した後の三次元地図に基づいて、経路計画を作成する経路計画作成手段20cと、その作成した経路計画に従い、駆動機構を介して移動領域内を移動するための移動手段10aとを有している。
(もっと読む)
移動装置
【課題】物体による移動の妨げを効率的に回避する観点から適当に移動または行動しうる移動装置を提供する。
【解決手段】第1移動条件が満たされていないものの、第2移動条件が満たされており、かつ、物体2が第1分類に属すると判定された場合、物体2に第1態様または任意態様にしたがった移動を促すようにロボット1の動作が制御される。「第2移動条件」は、物体2が第1態様にしたがって変位することにより、ロボット1が現状の目標位置軌道P0にしたがってこの物体2に妨げられずに移動することができるという条件である。「第1分類」はロボット1の行動態様を認識することができ、かつ、自律的に移動することができる人間、他のロボット等の物体の分類を意味する。このようにロボット1の促し動作に応じて物体を自律的2に変位させることにより、ロボット1が現状の目標位置軌道P0にしたがってこの物体2に妨げられずに移動することができることが事前確認される。
(もっと読む)
ロボットシステム
【課題】シンプルな構造のロボットを複数用いるロボットシステムにおいて、隊列を組んだ相対的な姿勢を常に保持しながら、大物の物体を速く安定に搬送するシステムを構築することが目的である。
【解決手段】搬送物を共同で搬送する全てのロボットにおいて、ロボットの旋回中心が概ね一致し、かつ、全ての移動手段の移動方向がこの旋回中心に対して概ね垂直となるようにするように、操舵手段の舵角を制御する。このような状態で全てのロボットの相対距離を保持すると、移動手段である車輪の横すべりを大幅に低減できるので、相対姿勢を所定の状態に保持することが容易になる。このような操舵手段の制御を行いながら、かつ、ロボット間の相対姿勢をフィードバック制御することで、相対姿勢のずれを防止でき、高速に走行する場合にも、ロボットの隊列を崩すことなく、移動、旋回することができる。
(もっと読む)
自律移動体及びその移動制御方法
【課題】障害物と自機との相対速度を考慮してポテンシャル場を生成し、障害物に衝突することのない経路を生成して移動する自律移動体において、対処を要する緊急度が種々異なる様々な問題に柔軟かつ適切に対応可能な移動制御を実現する。また、安全の余裕を見込んだ回避行動を生成し、障害物への衝突を確実に回避する。
【解決手段】ロボットが備える走行制御コントローラは、検知した障害物に関する仮想斥力を計算する際に、設定される予測スパンTiに相当する時間が経過した後のロボット11及び障害物16の予測位置から得られる予測最近傍距離ρTiと、ロボット11と障害物16との相対速度と、ロボット11と障害物16との許容最小距離ρ0と、を少なくとも考慮するように構成されている。
(もっと読む)
自律移動装置、及び、自律移動装置システム
【課題】操作者である人間を含めた外界移動体の行動を判定してその行動の判定結果に基づいて移動制御する自律移動装置とそのシステムを提供する。
【解決手段】自立的に移動するための移動手段をその一部に備えた自律移動装置は、外界移動体の位置と速度を検出する移動体検出手段と、検出した前記外界移動体の位置とその速度とを基に当該外界移動体の行動を判定する移動体行動判定手段と、移動体行動判定手段による当該外界移動体の行動の判定結果を基に移動手段を制御する移動制御手段とを備え、外界移動体は人間を含んでおり、移動体行動判定手段は外界移動体の行動判定として、人間が自律移動装置自体を目指して移動中か否かをも判定する。
(もっと読む)
自律移動体、その制御方法、及び制御システム
【課題】移動障害物との衝突を回避しながら、移動終点へと向かって経路上を効率的に移動することが可能な自律移動体、その制御方法、及びその制御システムを提供することを目的とする。
【解決手段】本発明に係る自律移動体10は、移動始点Sから移動終点Gへと至る自律移動体10の移動経路を作成する手段と、移動領域内に存在する移動障害物Bが、作成された自律移動体10の移動経路Rを横切る点を衝突予測点Pとして算出する手段と、移動障害物Bが衝突予測点Pを通過する第一の通過時間帯を算出する手段と、自律移動体10が衝突予測点Pを通過する第二の通過時間帯を算出する手段と、を備える。そして、第二の通過時間帯の少なくとも一部が第一の通過時間帯に重なる場合には、第二の通過時間帯が第一の通過時間帯に重ならないように、自律移動体10の移動速度を調整する。
(もっと読む)
自律移動型装置、自律移動型装置用の制御装置および自律移動型装置用のプログラム
【課題】人との衝突を回避することを可能とする自律移動型装置を提供する。
【解決手段】自律移動型装置500は、制御装置501によって移動が制御され、障害物600を検知する第1検知部511を備えている。制御装置501は、障害物600の経時的な位置のばらつきに関する情報を記憶する第1記憶部521を備えており、第1記憶部521に記憶された障害物600の経時的な位置のばらつきに関する情報に基づいて、第1検知部511で検知された障害物600が所定時間経過時に移動すると予測される領域を仮想障害物領域として設定する。
(もっと読む)
自律移動装置
【課題】特定の人が他の人とグループを構成する状況を考慮した自律移動装置を提供する。
【解決手段】自律移動装置1は、特定の人の近くにいる他の人が特定の人と共に移動するグループに属しているか否かを判定するグループ判定手段23と、自律移動装置が特定の人を追従するエリアである自装置追従エリアの情報を取得する自装置追従エリア取得手段21aと、他の人に追従する他の自律移動装置が他の人を追従するエリアである他装置追従エリアの情報を取得する他装置追従エリア取得手段22aと、グループ判定手段により他の人がグループに属していると判定され、且つ、自装置追従エリアの一部が他装置追従エリアと重複する場合に、他装置追従エリアと重複しない位置において自律移動装置を特定の人に追従させる追従制御手段24,26と、を備える。
(もっと読む)
1 - 20 / 33
[ Back to top ]