
Fターム[5H303AA11]の内容
Fターム[5H303AA11]の下位に属するFターム
Fターム[5H303AA11]に分類される特許
1 - 10 / 10
制御方法、プログラム、記録媒体、及び、制御装置
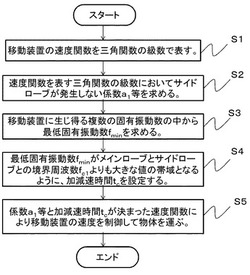
【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
(もっと読む)
搬送装置

【課題】 消費エネルギを最小化することのできる搬送装置を提供する。
【解決手段】 移動部2を駆動するためのアクチュエータ3と、軌道情報を生成する軌道情報生成部5と、アクチュエータを作動させるコントローラ4とを備える。軌道情報生成部は、アクチュエータにおける駆動エネルギを運動エネルギに変換するときのエネルギ変換効率に関する情報を記憶する効率情報記憶手段と、移動部が移動するときの特有の情報を記憶する特有情報記憶手段と、移動部の移動条件に関する情報を記憶する移動条件情報記憶手段と、移動部の運動特性に関する情報を記憶する運動特性情報記憶手段と、前記運動特性に基づき移動部の移動に要する駆動エネルギを算出する演算手段と、前記演算手段により算出されたエネルギをパラメータに含む評価関数の値が最小となる加速時、定速時および減速時の軌道情報を決定する軌道情報決定手段と備える。
(もっと読む)
搬送装置
【課題】 安定した精密な位置決め制御により、振動を防止し、高速で搬送することができる搬送装置を実現する。
【解決手段】 搬送装置10は、移動手段に載置する装置ベース11と、平行に設けられた1対の柱状部材12aと1対の柱状部材12aの一端を連結する連結部12bとからなるコアにソレノイドコイル12cを巻いて形成され、装置ベース11の上面11aに立設された電磁石12と、ソレノイドコイル12cの間に配置された永久磁石15を備え、電磁石12により上方に付勢可能に構成された、被搬送物を載置する搬送台13と、を備えており、搬送台制御変位計測手段21により計測された搬送台制御変位xと装置ベース変位計測手段22により計測された装置ベース変位yとに基づいて、位置制御手段23により、電磁石12に供給する電流を制御することにより搬送台13の位置を制御することができる。
(もっと読む)
線状構造体位置制御システム、線状構造体の位置制御方法及び移動構造体制御システム
【課題】掘削船から延びるライザー管のリエントリ作業を短時間に効率よく行う。
【解決手段】掘削船から延びるライザー管のリエントリ作業を行う際、ライザー管の掘削船に対する傾斜角度と、ライザー管の下端の位置と、掘削船の現在の位置の情報とを計測し、計測した傾斜角度の情報と、下端の位置の情報と、掘削船の現在の位置の情報とに基づいて、指定された掘削船の指定位置に対するフィードバック制御信号を生成し、このフィードバック制御信号を、掘削船に搭載された位置制御装置に供給する。
(もっと読む)
流体船積みおよび/または荷降ろしシステム用の直接制御、特に比例制御および/または直線的制御式装置
本発明は、海洋船積みシステム(2)用の結合器の動きと位置決めのための制御装置に関する。前記海洋船積みシステムは、ベースに固定されているライン端部を有する少なくとも1つの流体移送ラインと、目標ダクトへの接続用に適合されている結合器が設けられている可動ライン端部とを備え、前記システムは、ベースに対して少なくとも3自由度を結合器が有するように、複数の機械的接続部を更に有しており、制御装置は、それぞれが自由度においてシステムの動きを比例的に制御する少なくとも3つの比例式制御アクチュエータ(27、28、29)と、各自由度を追尾するシステムの位置センサ(30、31、32)と、結合器を動かすコマンドを入力するためのコマンド入力インタフェース(60)と、結合器の瞬間的位置を、センサから提供される情報から計算し、コマンド入力インタフェースの動きコマンド入力から、アクチュエータの組み合わされた動きが、コマンド入力インタフェースにおいてオペレータにより提供される動きコマンドに対応する結合器の動きとなるように、アクチュエータのそれぞれに与える同時制御指令を計算する計算機(41)と、を備える。 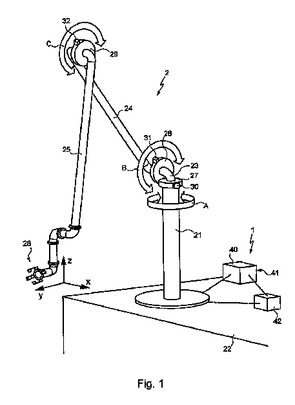 (もっと読む)
(もっと読む)
制振位置決め制御方法および装置
【課題】相殺するまでの振動が少なく、加速度によって生じる静的な振れよりも大きな振れが発生せず、その分、発生応力を低減でき、加速時間や減速時間を固有周期に合わせる必要がなく任意に設定できる制振位置決め制御方法および装置を提供する。
【解決手段】加速・減速時に振れや弾性変形を生じる移動体の振動を抑制して位置決めする制振位置決め制御方法と装置。移動体の振動を1自由度のばね−質点系でモデル化し、モデルの固有周期Tを求め、加速・減速時の加速度パターンをジャーク一定の増速及び減速を含む台形パターンとし、各ジャーク一定時間を固有周期の整数倍とする。
(もっと読む)
機械の移動可能な機械要素の運動案内方法
本発明は、制御装置(8)において動作する次のステップ、すなわち、a)機械要素(9)によって実行されるべき移動運動(XV)および最適化基準(OpK)が入力されるステップ、b)運動特性(Xsollk(t))が機械要素(9)によって実行されるべき移動運動および最適化基準(OpK)に基づいて決定されるステップ、c)位置目標量(Xsoll(n))が運動特性(Xsollk(t))により決定されるステップ、d)機械要素(9)の移動運動を実行するために調節部(6)に位置目標量(Xsoll(n))が出力されるステップを有する機械の移動可能な機械要素(9)の運動案内方法および制御装置(8)に関する。本発明は、使用者が直接に運動案内の最適化に影響を及ぼすことのできる機械の移動可能な機械要素の最適化された運動案内のための簡単な方法および簡単な制御装置を提供する。 (もっと読む)
固定子位置フィードバック制御器
固定位置フィードバック制御器。第1の位置モニタリングは、機械土台によって相対的な動きに対して支持される固定子の位置に応答する。第2の位置モニタリングデバイスは、機械土台に対する搬送車の位置に応答する。アクチュエータは固定子との相互作用を介して搬送車を移動させるために提供される。サーボ制御器は、第1および第2の位置モニタリングデバイスの出力における差異に応答して、機械土台に対する搬送車の位置を制御する。  (もっと読む)
(もっと読む)
荷物相互間の相対的な移動を制御するためのシステムおよび方法
荷物処理システム(100,400,500,1000)に含まれる荷物移動アクチュエータ(404)の相対的な制御を行うためのシステム、方法およびコンピュータプログラムが提供される。ここでは、荷物(102,402,502,1002)を、所望の明示的および/または相対的な荷物挙動にしたがって移動するためのアクチュエータ制御ストラテジーの選択が提案される。  (もっと読む)
(もっと読む)
バイラテラルサーボ制御装置
従来の力帰還型あるいは並列型バイラテラルサーボ構成に必要なマスタの位置(回転運動においては角度)センサと力(回転運動においてはトルク)センサを互いに冗長センサとして使用する。力帰還型あるいは並列型バイラテラルサーボにおいて、故障したセンサを他のセンサにより代替してスレーブの目標位置(角度)を決定することができるため、制御動作を継続することができる。また、本来はバイラテラルサーボのために備えたセンサを冗長センサの代わりに活用するので、より低いセンサの冗長度で所定の信頼度を有する制御装置が実現可能となる。 (もっと読む)
1 - 10 / 10
[ Back to top ]