
Fターム[5H303BB20]の内容
位置、方向の制御 (6,897) | 位置決め対象の種類(次元、軸) (1,310) | 複数の対象を制御するもの (25)
Fターム[5H303BB20]に分類される特許
1 - 20 / 25
ギア加工機の制御装置
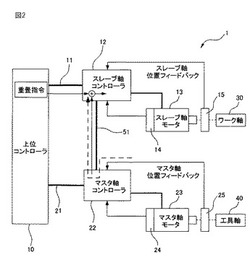
【課題】伝達遅れを抑え且つ分岐回路無しで、一つのマスタ軸に対して一つまたは複数のスレーブ軸を同期させる。
【解決手段】ギア加工機の制御装置(1)は、工具軸コントローラ(22)とワーク軸コントローラ(12)との間を直接的に接続して通信するバス(51)を具備し、工具軸位置検出センサ(25)により検出された工具軸(40)の位置はバスを通じてワーク軸コントローラに供給され、上位コントローラ(10)は所定の同期比と、ねじれ動作を加えるための重畳指令とをワーク軸コントローラに供給するようになっており、ワーク軸コントローラは、バスを通じて供給された工具軸の位置に同期比を乗算して作成された値と重畳指令とを加算して、ワーク軸(30)の移動指令を作成するようにした。
(もっと読む)
制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置

【課題】 一の入力指令値から複数の制御指令値を高精度かつ安定的に生成するとともにその際の演算負荷を低減することができる制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置を提供する。
【解決手段】 コンピュータを、所定の入力指令値から当該入力指令値のn階までの微分(n≧0)で表せるn+1個の制御指令値を、入力数が1であり出力数がn+1である状態方程式を用いて生成するn次のデジタルフィルタとして機能させる。
(もっと読む)
サーボドライブシステム
【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
制御装置及び方法
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
同期制御装置
【課題】容易かつ遅れなしにカム曲線の切替が可能な同期制御装置を提供する。
【解決手段】カム曲線記憶部64は、第1のカム曲線および第2のカム曲線を記憶する。制御部66は、カム曲線の切替え前は、各制御タイミングで、第1のカム曲線上の値に基づいて、従動側部材への位置指令値を求め、カム曲線の切替え後は、各制御タイミングで、第2のカム曲線上の値に基づいて位置指令値を求め、カム曲線の切替期間は、各制御タイミングで、第1のカム曲線または従動軸の位置に基づく第1のデータと、第2のカム曲線に基づく第2のデータとを加重平均した値に基づいて従動側部材への位置指令値を求める。
(もっと読む)
位置制御装置
【課題】簡素な構成で可動部材の位置を高精度に検出するとともに、高精度に停止位置の制御ができる位置制御装置を提供する。
【解決手段】直流電気モータ39〜42と、電気モータによって可動部材を移動させる移動手段2と、ブラシとコミュテータとの間の断続によって電気モータへの供給電流に発生するリップル成分を抽出してパルス化したリップルパルスを出力するパルス検出部38と、可動部材が移動されるときの現在位置を示す現在位置情報をリップルパルスに基づいて演算し記憶する現在位置情報記憶部44と、電気モータ39〜42に供給される電流が0となる前に可動部材が停止するように電流を低下させる電流制御装置45と、を備える。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
太陽光発電装置
【課題】対環境性能が高く最低限の発電量を確保して発電量の低下や変動を抑えることができるとともに、大電力を確保するために多数の太陽電池モジュールを設置する必要がある場合においてもコストを抑えることができる太陽光発電装置を提供する。
【解決手段】複数の太陽電池モジュールと、複数の太陽電池モジュールが設置された場所の環境条件を測定する環境測定装置5と、環境測定装置5により測定された環境条件に基づいて、複数の太陽電池モジュールの各々がなすべき目標仰角を算出する演算装置6と、演算装置6により算出された目標仰角に基づいて、複数の太陽電池モジュールの各々の仰角を制御する方向制御装置7とを備える。
(もっと読む)
太陽発電装置
【課題】 平面に略沿った受光面を有する複数の太陽電池パネル全ての受光面を、太陽の移動に追従し太陽光の照射方向に略垂直に向けることができる簡単な構造の太陽発電装置を提供する。
【解決手段】複数の太陽電池パネルを第1直線に略平行なパネル回動軸を中心に受光面が互いに略平行な状態を保ちつつそれぞれ回動可能に支持するパネル支持手段と、パネル支持手段を固定物に対し、第1直線と交わる第2直線に略平行な支持手段回動軸を中心に回動可能に支持する回動支持手段と、複数の太陽電池パネルをパネル回動軸を中心に連動して回動させるパネル回動手段と、パネル支持手段を支持手段回動軸を中心に回動させる支持手段回動手段と、を備えてなり、支持手段回動手段によるパネル支持手段の回動と、パネル回動手段による複数の太陽電池パネルの回動と、の両回動のみにより、太陽の移動に追従し、複数の太陽電池パネル全ての受光面を太陽光の照射方向に略垂直に向けるものである、太陽発電装置である。
(もっと読む)
サーボモータ制御回路
【課題】モータの作動異常判定を迅速に行うとともに、迅速にモータを停止させることが可能なモータ制御回路を提供する。
【解決手段】通信可能に接続された主制御装置から、制御対象を駆動するサーボモータの目標停止位置を含むサーボモータ駆動指令を受信する受信手段と、サーボモータの出力軸に設けられ、該サーボモータの回転位置を検出する回転位置検出手段と、サーボモータの回転位置が目標停止位置に到達するように、該サーボモータを駆動制御する駆動制御手段と、を備えるサーボモータ制御回路であって、サーボモータの回転位置の変化を検出する回転位置変化検出手段と、回転位置の変化に基づいて、該サーボモータが作動限界位置に到達したか否かを判定する作動限界判定手段と、を備え、駆動制御手段は、サーボモータが作動限界位置に到達したと判定したとき、主制御装置からのサーボモータ駆動停止指令を受信することなくサーボモータの駆動を停止する。
(もっと読む)
位置決め制御系の外乱非干渉化補償装置
【課題】いずれかの駆動体の加減速駆動により発生する外乱が機台を介して隣接する他の駆動体に伝達される装置において、隣接する駆動体から伝達される外乱による駆動体の位置決め精度の悪化の課題を、ソフトウエアの変更又は追加のみで解決できるようにする。
【解決手段】外乱の影響を受ける側の駆動体の観測量に対して外乱の非干渉化補償を行う外乱非干渉化補償器は、外乱発生側の駆動体の操作量ubを入力として、外乱の影響を受ける側の駆動体の観測量xlmに対する該外乱の非干渉化補償を行うためのフィードフォワード補償量ucを出力する第1のフィードフォワード補償器Fn1(s)と、外乱の影響を受ける側の駆動体の操作量Cl(s)の出力を第1のフィードフォワード補償器Fn1(s)の出力で補正する第1の演算器11とを備えている。
(もっと読む)
制御装置
【課題】 バイラテラル(マルチラテラル)方式による同期制御において、制御系の導出や調整を簡易化しつつ、同期精度を向上させることを目的としている。
【解決手段】 同期誤差が入力される第1学習フィルタ及び第2学習フィルタを含み、第1学習フィルタの出力にもとづいて第1の制御対象に制御入力をフィードフォワードし、第2学習フィルタの出力にもとづいて第2の制御対象に制御入力をフィードフォワードする反復学習制御回路とを備える。さらに、第1学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含み、第2学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含む。
(もっと読む)
同期制御装置
【課題】回転軸である追従軸が回転軸である被追従軸に同期する制御を行う同期制御装置を提供すること。
【解決手段】追従軸xの速度Vcが被追従軸yの速度Vp(目標速度)に到達した時、1回転の移動量で丸めた目標位置との遅れ量を挽回するために更に加速してから減速させる制御を行う。追従軸xの速度Vcが被追従軸yの速度Vp(目標速度)に到達した時、追従軸xの1回転の移動量で丸めた被追従軸yに対する目標位置との遅れ量は面積S4で表され、追従軸xを時間t5まで加速しその後時間t6まで減速する。従来方式による追従軸xの加減速方法に比較し、同期完了までの時間が(t4−t6)の長さ短縮されている。また、追従軸xの最大速度Vcmaxも従来方式に比べて遅い速度である。
(もっと読む)
制御装置
【課題】二重ジンバル機構においてインナージンバルとアウタージンバルの駆動制御を行う制御装置に関し、アウタージンバルとインナージンバル間の衝突や視軸変動の発生を抑止する。
【解決手段】アウタージンバルとインナージンバルを有する二重多軸ジンバルの駆動制御を行う制御装置であって、ジョイスティク51からのアウター用基準指令値とアウター速度センサ24の出力値との偏差であるアウター偏差値に基づきアウタージンバルを駆動制御するアウター制御部60Aと、中心角度指令値とインナー角度センサ36の出力値との偏差であるインナー偏差値とに基づきインナージンバルを駆動制御するインナー制御部70Aと、ジョイスティク51から指向操作によりアウター用基準指令値が入力されている時、前記インナー偏差値をアウター制御部60Aに反映させる補正手段(差角指令補償器82,加算器83)を設ける。
(もっと読む)
制御装置
【課題】高速移動時においても経路誤差を十分に低減させることができる制御装置の提供。
【解決手段】制御装置1は、位置指令部3と、誤差補正部5とを備える。位置指令部3は、移動機構2を移動させるための位置指令値を出力する。誤差補正部5は、フィードフォワード制御部51と、補償要素算出部52とを備える。フィードフォワード制御部51は、位置指令部3にて出力された位置指令値に基づいて移動機構2をフィードフォワード制御するものであり、補償要素512を備える。補償要素算出部52は、フィードフォワード制御部51における補償要素512に設定される値を位置指令部3にて出力される位置指令値に基づいて算出する。
(もっと読む)
位置計測装置及び位置計測方法、パターン形成装置及びパターン形成方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体の位置情報の計測精度の低下を抑制できる位置計測装置を提供する。
【解決手段】エンコーダシステムを含む位置計測装置は、第1面及び第1面と反対側の第2面を有するグリッド板と、移動体に配置され、第1面と対向するエンコーダヘッドと、グリッド板の温度を調整する温度調整装置とを備えている。
(もっと読む)
分散型モーション制御システム
【課題】 コントローラから絶対時間を付与しない制御指令を非同期通信方式で送信し、複数のモータを同期制御させる分散型モーション制御システムを提供する。
【解決手段】 コントローラは各サーボアンプへ形状指令データ送信後、パラメータ加速度データ、パラメータ加加速度データ、パラメータ位置指令データまたはパラメータ速度指令データを各サーボアンプへ非同期通信方式で一斉同報送信し、各サーボアンプが、同期信号で定められたタイミングで、それぞれ受信した形状指令データおよびパラメータ加速度データ、パラメータ加加速度データ、パラメータ位置指令データまたはパラメータ速度指令データを処理し、各モータ間での同期制御を実現するため、絶対時間指令データを作成することなく、コントローラが非同期通信方式を使って、モータ群を同期制御することができる。
(もっと読む)
シャフトレス輪転印刷機における同期制御装置および同期起動方法
【課題】輪転印刷機を停止状態から速やかに起動させ、起動時に機械の振動、ギヤ鳴り、及び連続紙の破断や弛みの発生を解消して速やかに同期制御に移行させること。
【解決手段】輪転印刷機の同期制御システムにおいて、集中制御装置01にバーチャル回転指令発生装置0101を、印刷機、折り機の同期駆動装置に位相指令検出装置0601、位相FB検出装置0602、0603を設置する。また、折り機に周期的な負荷変動の影響を抑止する回転補償器を設置する。そして始めは徐動速度にて滑らかに運転し、安定となった徐動運転中に折り機の位相FB検出装置0603の出力をバーチャル回転指令発生装置0101にプリセットした後、各印刷機と折り機の位相制御をオンとする。これにより、折り機は原点合わせ動作を必要とせず同期制御へ移行し、各印刷機は原点合わせゲインGzを用いて滑らかに原点合わせを行った後同期制御へ移行する。
(もっと読む)
位置検出器をマルチドロップ接続した多軸制御システム
【課題】 多軸制御システムの統括CPUの負荷をサーボ制御回路に分散させるとともに、そのCPUを経由しないでマルチドロップ接続された位置検出器からの位置情報をサーボ制御回路に与える。
【解決手段】 コントローラにマスタ通信回路を設置し、位置検出器にはスレーブ通信回路を設置することで、位置検出器の信号線をマルチドロップ接続できるようにするとともに、マスタ通信回路とサーボ制御回路間に専用の信号線を配線する。また、サーボ制御回路を複数軸分統合する。さらには、マスタ通信回路をも統合する。
(もっと読む)
複数軸同期システム及びその制御方法
【課題】高速かつ高精度のテーブル駆動を行いかつサーボアンプの処理の負荷を軽くする複数軸同期システムを得る。
【解決手段】同じタイミングで測定された全軸の速度データから平均加速度を求める平均加速度算出部(制御部)20Aと、各軸に設けられ、平均加速度算出部(制御部)20Aとアンプ相互間通信回線を介して接続され、平均加速度算出部(制御部)20Aに自軸の速度データを出力するとともに平均加速度算出部(制御部)20Aから平均加速度を入力して、平均加速度と自軸の加速度との差分値を求め、差分値に基づいてトルク補償値を算出する制御部20A,20B,20C,20Dとを備えている。
(もっと読む)
1 - 20 / 25
[ Back to top ]