
Fターム[5H303KK14]の内容
位置、方向の制御 (6,897) | 制御部、演算部の機能 (1,155) | 速度目標値が連続的に変化するもの (34)
Fターム[5H303KK14]に分類される特許
1 - 20 / 34
同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体
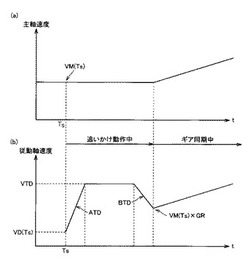
【課題】従動軸に加わる衝撃を緩和し、かつ同期開始位置で確実に同期制御を開始することができる同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】ユーザ指令部62は、主軸と従動軸とが同期を開始する同期開始位置を指定する。カム曲線作成部64は、カム曲線を作成する。検出部65は、毎制御周期ごとの主軸の位置情報を検出する。制御部66は、同期開始位置までは、カム曲線と主軸の位置情報とに基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、同期開始位置以降は、主軸と従動軸とのギア比に基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、算出した速度指令値で従動軸を制御する。
(もっと読む)
指令生成装置

【課題】目標位置が変更された場合であっても、可動軸に発生する衝撃や励起する振動を可及的に抑制しながら前記変更された目標位置までの補間動作を実行すること。
【解決手段】目標位置Xと可動軸の現在位置Cとの間を補間するように速度指令計算値vrを可動軸毎に算出する指令速度演算部と、直前に出力された速度指令出力値voと速度指令計算値vrとの差分である速度変更量Δvを可動軸毎に算出する速度変更量演算部と、可動軸毎の速度変更量Δvの全てが許容速度変更量Vmを越えない値となるように速度変更量Δvを制限する1つの補正ゲインRを算出する補正ゲイン演算部と、速度変更量Δvを補正ゲインRで制限した値と直前に出力された速度指令出力値voとを加算して次に出力する速度指令出力値voを可動軸毎に算出する指令速度出力部を備える。
(もっと読む)
搬送装置
【課題】 消費エネルギを最小化することのできる搬送装置を提供する。
【解決手段】 移動部2を駆動するためのアクチュエータ3と、軌道情報を生成する軌道情報生成部5と、アクチュエータを作動させるコントローラ4とを備える。軌道情報生成部は、アクチュエータにおける駆動エネルギを運動エネルギに変換するときのエネルギ変換効率に関する情報を記憶する効率情報記憶手段と、移動部が移動するときの特有の情報を記憶する特有情報記憶手段と、移動部の移動条件に関する情報を記憶する移動条件情報記憶手段と、移動部の運動特性に関する情報を記憶する運動特性情報記憶手段と、前記運動特性に基づき移動部の移動に要する駆動エネルギを算出する演算手段と、前記演算手段により算出されたエネルギをパラメータに含む評価関数の値が最小となる加速時、定速時および減速時の軌道情報を決定する軌道情報決定手段と備える。
(もっと読む)
ピッチ駆動装置
【課題】ピッチ駆動による装着ヘッド等の可動体の振動を低減する機能を、ピッチ駆動の高速化とコントローラの演算負荷軽減の要求を満たしながら実現する。
【解決手段】部品実装機の装着ヘッド22に、複数本の吸着ノズル21を所定ピッチで配列し、部品吸着動作時や部品実装動作時に、装着ヘッド22を回転方向に吸着ノズル21の配列ピッチ分だけピッチ駆動する。ピッチ駆動の速度指令プロファイルとして、速度上昇を性能限界より低い速度で制限した台形波状の速度指令プロファイルを用いて装着ヘッド22をピッチ駆動することで、ピッチ駆動による装着ヘッド22のX軸方向の振動エネルギを減衰させる。振動エネルギを減衰させる周波数帯は、台形波状の速度指令プロファイルの最高速度指令によって変化させることができ、減衰させる周波数が装着ヘッド22の支持部分の固有振動数と一致するように最高速度指令を設定すれば良い。
(もっと読む)
露光装置及びデバイス製造方法
【課題】 パターンの重ね合わせ精度の低下及び露光量の均一性の低下を抑制した走査露光装置を提供する。
【解決手段】 原版9と基板8とを走査しながら前記基板の複数のショット領域を露光する走査露光装置は、前記基板を保持して移動するステージ10と、前記ステージの移動を規定する駆動プロファイルに基づいて前記ステージの移動を制御する制御部15と、を備える。前記駆動プロファイルのうち少なくとも1つのショット領域の露光中の前記ステージの移動を規定する部分は、前記ステージの制御系における共振周波数よりも低い周波数の正弦波から構成されている。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
位置決め制御装置
【課題】 上位コントローラと、該上位コントローラからの起動信号に基づいて被搬送物を搬送するサーボモータと、該サーボモータを可変速駆動するサーボアンプとを用いて形成される位置決め制御装置の省配線を図る。
【解決手段】 フィルム1をローラ2で一定量だけ定寸送りしつつ、カッター4で裁断するときに、ローラ2を駆動するサーボモータ11を可変速制御するサーボアンプ40を位置指令生成部41、移動量メモリ部42、位置・速度・電流制御部43、位置ラッチ部44、状態監視フラグ部45、位置決め完了判定部46で形成することにより、フィルム1上に印刷されたマーク1a,1b,・・・をその都度通過したタイミングで発生する信号がオンされると状態監視フラグ部45の状態監視フラグをセットし、この状態監視フラグの状態を上位コントローラ31に出力する。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
数値制御装置及び数値制御方法
【課題】移動量及び動作を開始して終了するまでの時間の入力を受け付けることにより、自動的に移動軌跡データ及び速度データを生成して工作機械の動作を制御することができる数値制御装置及び数値制御方法を提供する。
【解決手段】移動量データ及び移動時間データの入力を受け付け、入力を受け付けた移動量データ及び移動時間データに基づいて、制御対象の移動軌跡を示す移動軌跡データ及び速度の変化を示す速度データを生成する。生成した移動軌跡データ及び速度データに基づいて、工作機械の各軸を駆動するサーボモータの動作を制御するサーボデータを出力する。
(もっと読む)
位置決め用関数発生装置及び方法、並びに、それを利用した電動機
【課題】CPUの演算時間が短く、かつ、使用するメモリの個数が少ない位置決め用関数発生装置と位置決め用関数発生方法、更には、それを利用した電動機を提供する。
【解決手段】目標位置入力と、速度指令入力と、加速時間入力と、減速時間入力と、サンプリング時間とを入力し、位置指令を生成して出力すると共に、減速時においては、減速演算回数と減速時移動量とにより導出される位置指令減速パタン補正値により、位置指令単調減速パタンに対して、順次、補正を行うことにより、減速時位置指令を出力し、減速時位置指令を生成する際には、減速時移動量に対して、減速演算回数により、前回剰余加算割算を実行することにより、位置指令減速パタン補正値を導出する。
(もっと読む)
移動体画像追尾装置および方法
【課題】追尾性能を改善する。
【解決手段】天頂から一定の距離よりも離れた第1範囲に移動体がある場合には、角度と追尾誤差検出値とを使用して、移動体を追尾するように第1回転手段および第2回転手段を駆動する第1角速度指令値を計算する第1計算手段と、天頂から一定の距離以内の第2範囲に移動体がある場合には、角度と追尾誤差検出値とを使用して、移動体の移動方向を推定する推定手段と、角度と追尾誤差検出値と移動方向とを使用して、天頂特異点を回避しながら移動体を追尾するように第1回転手段および第2回転手段を駆動する第2角速度指令値を計算する第2計算手段と、第1範囲に移動体がある場合には第1角速度指令値と角速度との差がなくなるように、移動体が第2範囲にある場合には第2角速度指令値と角速度との差がなくなるように、第1回転手段および第2回転手段を駆動制御する制御手段と、を具備することを特徴とする。
(もっと読む)
作動制御方法および対回路基板作業装置
【課題】基板保持装置と、作業ヘッドと、その作業ヘッドと基板保持装置に保持された回路基板とを相対的に移動させる相対移動装置とを含む対基板作業装置において、作業ヘッドに作動,停止を繰り返させる際の衝撃や振動を抑制する。
【解決手段】相対移動装置を、作業ヘッドと基板保持装置との一方を保持して移動可能な可動部材と、駆動源を備えて可動部材を駆動する駆動装置と、可動部材の加速度を0から増加させた後、0まで減少させて、その可動部材の移動速度を0から増加させ、後に、加速度を0から減少させた後、0まで増加させて、移動速度を0まで減少させ、可動部材を第1位置から第2位置へ作動させるように駆動源を制御する制御装置とを含むものとし、制御装置を、可動部材の加速度を増加させる期間である加速度増加期間と減少させる期間である加速度減少期間とにおいて加加速度を非対称に制御する非対称制御部を備えたものとする。
(もっと読む)
運動指令生成装置
【課題】複雑な動作条件を満足する運動指令値をリアルタイムで計算できる指令値生成装置を得るものである。
【解決手段】制御対象の動作条件が入力される入力部と、時間の関数である基本関数と前記基本関数毎に未知の重み係数を乗じて足し合わせた重み付き線形和によって運動指令値を表した線形和情報を作成し、前記動作条件に応じて前記重み係数を含む最適化変数に対する線形の等式及び不等式によって制約条件及び評価指標を表した線形計画問題を作成して線形計画問題情報として記憶する線形計画問題設定部と、前記線形計画問題情報が表す前記線形計画問題を解くことによって、前記重み係数を求める重み係数算出部と、前記線形和情報に基づき前記基本関数に前記重み係数算出部で求めた重み係数を乗じて足し合わせた重み付き線形和によって前記運動指令値を算出する指令値算出部とを備えた。
(もっと読む)
ロボットの制御方法、ロボットの制御装置及び部品実装機
【課題】ビーム上の2地点間で移動体を移動させるときの移動体の移動時間がロボットの固有周期に近接している場合であっても移動体の移動時間を本来の適切な時間に保持することができるロボットの制御方法、ロボットの制御装置及び部品実装機を提供することを目的とする。
【解決手段】X軸ビーム5b上の第1の位置に停止している移動ステージ5cをX軸ビーム5b上の第2の位置まで移動させて停止させるとき、移動ステージ5cを第1の位置から起動させて所定速度まで加速移動させる加速移動指令信号S1、移動ステージ5cを所定速度で定速移動させる定速移動指令信号S2、移動ステージ5cを所定速度から減速移動させて第2の位置に停止させる減速移動指令信号S3をこの順で出力し、加速移動指令信号S1の出力継続時間t1及び減速移動指令信号S3の出力継続時間t3をそれぞれXYロボット5の固有周期Tの25%以下とする。
(もっと読む)
運動制御システムにおいて終了条件を満たす方法およびシステム
経路計画の終了条件を満たすシステムおよび方法の一実施形態は、経路計画において経過した総時間を追跡しながら(22)、経路計画に関する指令を連続して生成する(21)経路生成器(4)を利用している。この経路生成器は、経路計画の残り時間を計算し、残り時間の長さがサンプル期間全体の長さに満たない場合(23)、その残り時間を経路計画の最終サンプル期間の長さの代用とする(24)。 (もっと読む)
制振位置決め制御方法および装置
【課題】相殺するまでの振動が少なく、加速度によって生じる静的な振れよりも大きな振れが発生せず、その分、発生応力を低減でき、加速時間や減速時間を固有周期に合わせる必要がなく任意に設定できる制振位置決め制御方法および装置を提供する。
【解決手段】加速・減速時に振れや弾性変形を生じる移動体の振動を抑制して位置決めする制振位置決め制御方法と装置。移動体の振動を1自由度のばね−質点系でモデル化し、モデルの固有周期Tを求め、加速・減速時の加速度パターンをジャーク一定の増速及び減速を含む台形パターンとし、各ジャーク一定時間を固有周期の整数倍とする。
(もっと読む)
パワーアシスト機能を実現する移動装置
【課題】サーボ制御から減速制御を経てインピーダンス制御に連続的に変化させることによってパワーアシストする装置を、力覚センサを利用しないで構築する技術を提供する。制御系の2重化による安全性の向上、またはパワーアシスト装置のコストダウンに有用である。
【解決手段】駆動機構を持つ移動体と、3種類の制御手段(サーボ制御手段、減速制御手段、加速度に基づいてインピーダンス制御する手段)を備えている。サーボ制御された状態で移動体が作業者の近傍に移動した時に制御パラメータを徐々に変化させることによってサーボ制御手段による制御状態から減速制御手段による制御状態に徐々に切換える切換え手段と、移動体に操作が加えられた時に制御パラメータを徐々に変化させることによって減速制御手段による制御状態からインピーダンス制御手段による制御状態に徐々に切換える切換え手段を備えている。
(もっと読む)
モーションコントローラおよびモーションプランナおよび多軸サーボシステムおよびサーボアンプ
【課題】多軸のモーションコントローラにおいて、最短時間制御を可能とするようなコマンドを持たせる。
【解決手段】PTP制御において、従来は各点の座標の値のみを指定するようにしていたが、各点の座標に加えて、その点を通過する速度の目標値も指定することにより、速度も考慮した移動の軌跡を指定することができ、予め計算しておいた最短時間移動を実現する軌道をモーションコントローラに指令することにより最短時間制御を実現する。また、少ないポイント数で軌道を指定できるので、最短時間を実現する軌道の容易な計算を可能にする。
(もっと読む)
位置指令装置と位置指令生成方法
【課題】運転中での移動平均時間(S字時間)の変更を可能とする位置指令装置と位置指令生成方法を提供する。
【解決手段】上位システムのコマンドを受信しレスポンスを返す第1コマンドレスポンス送受信部(1)と、コマンドから第1セグメント指令位置を生成する直線加減速指令生成部(2)と、コマンドに従い第1セグメント指令位置を設定可能な回数の移動平均をして第2セグメント指令位置を生成するS字加減速指令生成部(3)と、位置制御装置に第2セグメント指令位置を位置制御装置に送信し、位置制御装置からレスポンスを受信する第2コマンドレスポンス送受信部(4)と、第2セグメント指令位置から指令位置を生成する指令位置生成部(5)と、を備える位置指令装置において、上位システムの移動平均回数変更のコマンドにより変更が可能かどうか判断し、変更可能なときは、回数変更信号を生成する回数変更判断部(6)を備えた。
(もっと読む)
目標軌道生成装置及び目標軌道生成方法
【課題】ワークの位置決め制御の時間短縮を図る。
【解決手段】ワークの位置制御系に対して、最終的に位置決めすべき指令位置が位置決め動作開始後に変更された際に、指令位置予測器6によって次の時刻の指令位置を予測し、その予測した指令位置とワークの現在位置との差(目標位置軌道)に対応した目標加速度軌道を生成し、その目標加速度軌道から目標速度軌道及び目標位置軌道を生成して、ワークに対する位置決め制御を行うので、短時間に効率良く位置決め制御を終了させることができる。
(もっと読む)
1 - 20 / 34
[ Back to top ]