
Fターム[5H303KK21]の内容
位置、方向の制御 (6,897) | 制御部、演算部の機能 (1,155) | 適応制御を行うもの (164)
Fターム[5H303KK21]の下位に属するFターム
制御位置に応じてパラメータを変更するもの (33)
負荷に応じてパラメータを変更するもの (34)
ループゲインを変更するもの (47)
その他のパラメータを変更するもの (29)
Fターム[5H303KK21]に分類される特許
1 - 20 / 21
位置制御装置
【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
ロボット制御装置の補正パラメータ同定装置

【課題】減速機角度伝達誤差によるうねりを補正する。
【解決手段】ロボットの手先部に発生するうねりの振幅を求める手段と、複数の関節の所定の関節Jiに対応するうねりの振幅値Diを求める手段と、所定の関節Jiをモータの位置指令θrefiで単軸動作させた際に、関節の軸に現れる位置フィードバック信号Biを計測する手段と、関節Jiに対する位置指令値θrefiに振幅Cのうねりを重畳的に加え、更に、他の軸Jxに位置指令θrefxが加えたと仮定した場合に、手先位置において発生するうねりC’iを計算する手段と、Ai=(Ci/C’i)×Diという式に従って、Biに対応するAiを求める手段と複数のロボットに対して、以上の各手段を用いて、Biに対応するAiを求める手段とを備える、ロボット制御装置の補正パラメータ同定装置。
(もっと読む)
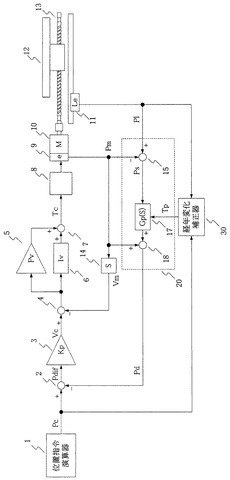
デュアル位置フィードバック制御を行うサーボ制御装置
【課題】デュアル位置フィードバック制御を行って加工目的に応じた位置偏差の低減を実現するサーボ制御装置を提供する。
【解決手段】サーボ制御装置が、モータの位置を検出する第1の位置検出部と、被駆動体の位置を検出する第2の位置検出部と、位置指令とモータ位置フィードバックとに基づいて第1の位置偏差を演算する第1の位置偏差演算部と、位置指令と被駆動体位置フィードバックとに基づいて第2の位置偏差を演算する第2の位置偏差演算部と、第1の位置偏差と第2の位置偏差との差分を、時定数回路を通して第1の位置偏差に加算することにより、位置制御に使用される第3の位置偏差を演算する第3の位置偏差演算部と、第2の位置偏差又は第3の位置偏差のいずれか一方を選択して出力する切替部と、該切替部からの出力を学習し、第3の位置偏差に対する補正量を出力する学習制御部と、を備える。
(もっと読む)
モータ制御装置
【課題】 モータを駆動する場合に機械系に発生する機械共振の抑制機能を向上させる。
【解決手段】 モータ1の速度を検出する検出器2と、該検出器からの速度検出値とモータの速度指令値ωsとの差を演算する演算器5と、前記差に基づいてモータのトルク指令値を生成する速度制御手段6と、前記トルク指令値に応じてモータを制御するトルク制御手段8を含む閉ループ制御系を備えたモータ制御装置に適用される。更に、モータを加振させる信号を発生するための信号発生器12と、前記信号を前記トルク指令値に重畳する加算器13と、第1、第2のノッチフィルタ7、10とこれらの係数を修正してノッチ周波数を更新する調整器11を含む適応ノッチフィルタとを備え、前記調整器は、前記ノッチ周波数の更新結果に応じてスイッチ14をオン、オフして前記加算器への前記信号の供給をオン、オフする。
(もっと読む)
工作機械
【課題】パラメータの調整なしで象限突起の高さを低減させることができる工作機械を提供する。
【解決手段】実制御部10は、アンプ14と、その出力電流によってトルク制御されるモータ15と、モータによって駆動される送り駆動機構16と、位置指令信号に応答して第1のトルク指令信号をアンプに入力して送り駆動機構の位置及び速度をフィードバック制御する第1の制御部(制御器11、12)とを含み、シミュレータ部20は、仮想アンプ24と、仮想モータ25と、摩擦トルクをゼロと仮定して構築した仮想送り駆動機構26と、位置指令信号に応答して第2のトルク指令信号を仮想アンプに入力して仮想送り駆動機構の位置及び速度をフィードバック制御する第2の制御部(制御器21、22)とを含み、トルク指令補正部30は、第1と第2のトルク指令信号の偏差分を演算し、この偏差分によってアンプに入力されるトルク指令信号を補正する。
(もっと読む)
慣性モーメント同定器を備えたモータ制御装置
【課題】 クーロン摩擦の影響を除去し、クーロン摩擦の大きな制御対象の慣性モーメントを高精度に同定することができ、その同定結果に基づいて制御対象を高精度に動作制御できる慣性モーメント同定器を備えたモータ制御装置を提供する。
【解決手段】 モータ位置基本周波数成分を入力し正規化モータ加速度矩形波を出力する正規化モータ加速度矩形波演算器109と、トルク指令基本周波数成分と前記正規化モータ加速度矩形波を入力しトルク指令正規化モータ加速度矩形波乗算値を出力するトルク指令正規化モータ加速度矩形波乗算値演算器110と、前記トルク指令正規化モータ加速度矩形波乗算値を入力しトルク指令正規化モータ加速度矩形波乗算値平均値を出力するトルク指令正規化モータ加速度矩形波乗算値平均値演算器111と、前記トルク指令正規化モータ加速度矩形波乗算値平均値とモータ位置振幅を入力し慣性モーメント同定値を出力する慣性モーメント演算器113と、を備える。
(もっと読む)
位置制御装置
【課題】駆動系を支持固定する機台部の剛性に起因した振動と機台変位の発生に対して、加減速時においても、駆動体の振動を抑制でき、且つ、位置指令に対する駆動体位置の追従誤差を縮小化でき、振動抑制と駆動体位置の高精度制御を両立させ、更に、機械各部の振動を誘発することなく、且つ、機械パラメータ変動時においても高い振動抑制効果を維持できる位置制御装置を提供する。
【解決手段】駆動体を無振動動作させるための推力フィードフォワード構造と、この構造により発生する位置偏差及び機台変位により発生する位置偏差を、同時に補償する制御構造を位置制御装置3に加える構成。又は、駆動体位置と機台変位を無振動応答化するための加減速処理と、この加減速処理後の位置指令値に関して、フィードフォワード量を決定する制御構造を位置制御装置に加える構成とする。
(もっと読む)
位置制御装置と位置指令装置と位置指令生成方法
【課題】 加速する場合は加速度a以内、減速する場合は減速度b以内におさめた位置制御装置および位置指令装置とその方法を提供する。
【解決手段】 位置決めコマンドから位置指令周期ごとに指令位置を生成する位置指令部(1)と、指令位置とモータ位置から指令速度を生成する位置制御部(2)と、指令速度とモータ速度からトルク指令を生成する速度制御部(3)と、トルク指令に基づいてモータを駆動するモータ駆動部(4)と、を備えた位置制御装置において、位置指令部は、位置決めコマンドの加速度、減速度、移動距離からピーク速度を生成するピーク速度生成部(13)と、ピーク速度から指令位置の基本パターンを生成する基本パターン生成部(12)と、基本パターンと移動距離から補正パルスを生成する補正パルス生成部(13)と、補正パルスと基本パターンから指令速度パターンを生成する指令速度パターン生成部(14)とを備えた。
(もっと読む)
シーク制御方法、シーク制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御によるシーク制御制御装置において、シーク制御からフォローイング制御への切り替え時の電流段差を防止する。
【解決手段】シーク制御からフォローイング制御への切り替え時に、電流段差解消軌道生成部(28)が、電流値u(n),u(n−1)の差分から段差分の電流値Udiffを計算し、この計算値を相殺する目標位置軌道r‘(n)(又は目標電流軌道)を、フォローイング用コントローラ(22)に供給する。このため、出力電流の電流段差が解消される。
(もっと読む)
位置決め制御装置、位置決め制御装置の制御方法、及び画像形成装置
【課題】実験的や経験的な調整を不要とし補償器の定数を変更しても検出系の特性により制御系の制御性能が低下することのない位置決め制御装置を提供する。
【解決手段】位置検出器76の位相の異なる2つのアナログ出力信号と夫々を2値化した2値化信号に基づいて処理を行う第1の速度演算部81と第2の速度演算部82とを備え、所定の条件によって前記2つ速度演算部81、82を切り換えて速度フィードバックを行う位置決め制御装置において、2値化信号の周波数と制御系の応答周波数に基づいて速度演算部81、82の切り換え条件を設定する切り換え部83を備えるようにした。
(もっと読む)
一般化予測制御(GPC)を基礎とする軸の位置制御方法
軸(2)のための位置調節器(1)に、瞬時位置実際値(x(0))、瞬時位置目標値(x*(0))および予測位置目標値(x*(ti))と、各予測位置目標値(x*(ti))についてそれぞれ直前の位置目標値(x*(0),x*(ti))に対するそれの時間的ずれ(δti)を表わす値とが入力されている。位置調節器(1)が、軸(2)のモデル(6)に基づいて、瞬時操作量(S(0))と、予測位置目標値(x*(ti))についてその都度期待操作量(S(ti))および期待位置実際値(x(ti))とを算出する。位置調節器(1)が、瞬時操作量(S(0))、期待操作量(S(ti))および期待位置実際値(x(ti))を、瞬時位置実際値(x(0))および期待位置実際値(x(ti))と対応する位置目標値(x*(0),x*(ti))との総偏差(G)が予め定められた評価関数にしたがって最適化されるように算出する。位置調節器(1)が軸(2)を瞬時操作量(S(0))に応じて制御する。  (もっと読む)
(もっと読む)
位置決め制御システム及びフィルタ
【課題】外乱オブザーバを用いることにより制御精度を向上させるとともに、ワインドアップ現象を防止する。
【解決手段】位置決め制御システム10は、制御対象Pのシリンダ12の進退量Yから外乱Dを推定してフィードバックを行う外乱オブザーバ46と、該外乱オブザーバ46によるフィードバックループ内に設けられた飽和要素48及び低域通過要素Qと、飽和要素48の飽和値Lを偏差εに基づいて変化させる飽和値変更部50とを有する。飽和要素48は正帰還のマイナーループ70内の前向き通路に設けられている。低域通過要素Qは正帰還のマイナーループ70内のフィードバック通路に設けられている。
(もっと読む)
無限インパルス応答フィルタ回路、及び磁気ディスク装置
【課題】係数を適応的に変化させても安定的に動作可能なIIRフィルタ回路を提供する。
【解決手段】係数を適応的に変化させる無限インパルス応答フィルタ回路であって、 その伝達関数が、zの次数がN以下である多項式B(z)と、次数がNである多項式A(z)とを用いて、
で規定され、
として、前記多項式A(z)のzのN乗の項を1としたとき、前記Nが偶数及び奇数に対応して、前記多項式A(z)をあらかじめ定めた条件を満足するよう定められてなることを特徴とする無限インパルス応答フィルタ回路。
(もっと読む)
多軸サーボシステムと自動調整方法
【課題】パラメータ自動調整装置が不要で、複数軸を同じサーボパラメータに調整できる多軸サーボシステムを提供する。
【解決手段】 複数のモータ制御装置(1)から一つを調整軸モータ制御装置(11)に、他を展開軸モータ制御装置(12)にパラメータで指定し、上位装置(3)は、複数のモータ制御装置(1)に動作させる移動指令発生部(31)と、調整軸モータ制御装置(11)のパラメータ変更要求とパラメータの識別情報と変更情報とに従い、複数のモータ制御装置(1)のサーボパラメータを変更するパラメータ設定部(32)を備え、モータ制御装置(1)は、制御係数を計算するパラメータ計算部(114)と、サーボ情報を解析してパラメータの値を決定し、パラメータの変更が必要かどうかを判断するパラメータ調整部(112)と、パラメータ変更要求とパラメータの識別情報と変更情報を上位装置(3)に送信するパラメータ変更要求部(113)とを備えた。
(もっと読む)
位置決め制御方法、位置決め制御装置及び画像形成装置
【課題】負荷変動の影響を受け難い制御系とし、騒音を抑えた無理のない制御を可能とする。
【解決手段】駆動軸に連結された駆動側慣性体と、従動軸に連結された従動側慣性体とを含む捩り振動系を成す機構の位置決め制御装置において、予め初期位置から目標位置への状態軌道及び操作量軌道のデータ系列を制御の参照軌道としてそれぞれ記憶する状態軌道系列記憶部130及び操作量軌道系列記憶部120を備えた参照軌道発生部110と、前記状態軌道系列記憶部130に記憶された前記状態軌道に沿うように前記操作量軌道系列記憶部120に記憶された操作量軌道に対してフィードバック制御部140によって状態フィードバック制御を行い、位置決めする。
(もっと読む)
位置制御装置、位置制御方法及び位置制御プログラム
【目的】物体の位置を、物体を保持する移動機構によって目標位置に速やかに追従させる技術を提供する。
【構成】本発明は、物体の位置を検出する位置検出器と、物体を保持しており物体に加える力の指令値が入力され入力された指令値を実現するように動力によって動作する移動機構と、物体に加える力の指令値を移動機構へ出力する指令装置を備える。指令装置内に構築された制御ロジックは、スライディングモード制御ロジックに対してs/(L+K・s+B・s2)の局所的なフィードバックループを付加したものである。この局所的なフィードバックループにより、物体の位置を目標位置に追従させる際にオーバーシュートを生じさせることなく、さらに指令装置が出力する指令値がチャタリングすることを防止できる。
(もっと読む)
数値制御装置
【課題】 学習制御実行区間に、動作パターンが変更されるような指令や信号入力がないかチェックできる数値制御装置を提供する。
【解決手段】 数値制御装置は、加工プログラムを順次読み込み(S1)、学習制御開始指令が読み込まれ、学習制御終了指令が読み込まれるまでフラグFを「1」にセットする(S2,S9,S3,S10)。このフラグFが「1」にセットされている学習制御区間において、動作パターンを変更するような学習中に不適切な指令や信号入力がないか判断する(S5,S6)。このような指令や信号入力があると、アラーム停止またはフィードホールド停止し、停止の原因を表示し、学習制御を無効にする(S11〜S13)。学習中に不適切な指令や信号入力があると、停止し原因が表示されるから、加工プログラムの修正作業が容易となる。これにより学習制御に起因する誤切削等を防止することができる。
(もっと読む)
ディスクドライブのトラック探索モードでの適応的載置制御方法及び装置
【課題】ディスクドライブのトラック探索制御時に探索距離に関係なく向上された載置制御を実行させる載置制御方法及び装置を提供する。
【解決手段】ディスクドライブのトラック探索モード制御方法であって、トラック探索モードの加減速制御モードから載置制御モードへ遷移される時点のヘッド動きの初期状態をシステムの固有ベクトル線上に遷移させて、固有ベクトルに沿ってヘッドを目標位置及び速度値に収斂するように制御することを特徴とするディスクドライブのトラック探索モードでの適応的載置制御方法。
(もっと読む)
駆動制御装置
【課題】 加速度センサの動作及び取付け方向についての異常の有無を判定することができる駆動制御装置を提供する。
【解決手段】 駆動装置10を介して被駆動体12の動作を制御する駆動制御装置が、被駆動体の位置又は速度を検出する位置又は速度検出手段20,22と、被駆動体に取り付けられ、位置又は速度検出手段とは別に被駆動体の加速度を検出する加速度検出手段26とに加えて、加速度検出手段からの加速度情報に基づいて加速度検出手段の動作又は被駆動体への取付けについての異常の有無を判定する判定手段130を具備するように構成される。判定手段からの判定情報が異常を示すときには、加速度検出手段からの加速度情報を使用することなく、位置又は速度検出手段からの位置又は速度に基づいて、被駆動体の動作を制御する。
(もっと読む)
指令パラメータ設定方法とモーション制御装置
【課題】システムの振動を低減する指令のパラメータを、簡単に決定できるようにする。
【解決手段】サーボ制御装置へ指令のパラメータを出力しモータを制御するモーション制御装置において、移動距離distと移動時間tbを入力する動作条件入力部と、振動周期tfを入力する振動入力部と、移動距離と振動周期を入力して振動低減パラメータを導出し、モータ指令計算部に出力する振動低減パラメータ導出部と、振動低減パラメ−タを入力してモータ指令を生成しモータ指令出力部に出力するモータ指令計算部と、モータ指令をサーボ制御装置に出力するモータ指令出力部とを備え、振動低減パラメータ導出部は動作条件と振動周期の比xを求め、予め求めておいた関数F(x)にx=tb/tfの値を代入して指令のパラメータを決定する。
(もっと読む)
1 - 20 / 21
[ Back to top ]