
Fターム[5H501DD04]の内容
Fターム[5H501DD04]に分類される特許
1 - 20 / 223
回転機の制御装置
回転機の制御装置
モータ駆動制御装置及び集積回路装置
モータを制御するための方法およびシステム
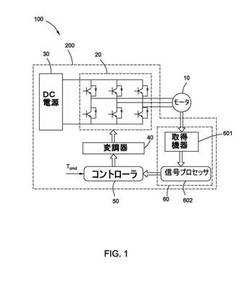
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
モータ制御装置、歩行補助装置及びモータ制御方法

【課題】モータコイルの過熱を防止するモータ制御装置において、コイル温度が上限を超えないことを保証しつつ、コイル温度の上限を保証上限温度に十分近い値に設定して、コイル電流の制限に因るモータ性能の低下を抑止する。
【解決手段】上限電流算出部15は、温度センサ6u,6v,6wが検出した各相コイルの温度に基づいて各相において第1の所定時間後のコイル温度が上限温度以下に留まる上限値を、第1の所定時間より短い第2の所定時間の経過ごとに算出する。ベクトル処理部16は、目標コイル電流に対応する目標ベクトルの長さを、上限電流算出部15が算出した各相の上限値の内の最小のものに対応する長さ以内になるように補正する。相電流変換部17は、補正後の目標ベクトルに基づいて各相電流値を算出し、インバータ3を介してモータ2の各相電流を制御する。
(もっと読む)
電気モータ制御装置
【課題】固定容量型のポンプを使用しつつ、レバーの操作量に応じた速度でアクチュエータを駆動する。
【解決手段】電気モータの回転速度を制御する電気モータ制御装置であって、ポンプの吐出圧が最高負荷圧よりも所定の設定圧だけ高くなるように、最高負荷圧に基づいて電気モータの暫定目標回転速度を算出し(S74)、ポンプの吐出圧に基づいて、電気モータの出力トルクがその吐出圧のときに出力可能な最大トルクとなる電気モータの回転速度を上限回転速度として算出し(S75)、暫定目標回転速度と上限回転速度とのうち、低いほうを電気モータの目標回転速度として算出し(S76)、電気モータの回転速度が目標回転速度となるように、電気モータの回転速度を制御する(S77)ことを特徴とする。
(もっと読む)
制振制御装置
【課題】フィルタへの余剰トルク成分の蓄積を抑制する制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、車両の車両情報を入力として、車両へのトルク入力と前記モータの回転速度の理想伝達特性のモデルGm(s)と、車両へのトルク入力とモータの回転速度の実伝達特性のモデルGp(s)とを用いたモデルGm(s)/Gp(s)を含むフィルタにより第1トルク目標値を算出する第1トルク目標値算出手段と、モータの回転速度を検出するモータ回転速度検出手段と、モデルGp(s)を含むフィルタを用いて、トルク指令値及び回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を算出する第2トルク目標値算出手段と、第1トルク目標値と前記第2トルク目標値とを加算してトルク指令値を算出する加算手段と、トルク指令値に基づいて、モータを制御するモータ制御手段とを備える。
(もっと読む)
駆動装置
【課題】モータの制御性を高くすることや車両の挙動をより適正なものとする。
【解決手段】カットオフ周波数Fc以上の周波数成分を減衰させるローパスフィルタ処理を電流センサにより検出されたバッテリの充放電電流Ibに施して得られるフィルタ後電流FIbをモータの制御に用いるものにおいて、モータの回転数Nmが昇圧コンバータを含む回路の共振回転数領域(下限回転数N1〜上限回転数N2の領域)外のときには(S110)、所定周波数Fc1をカットオフ周波数Fcに設定する(S120)。一方、モータの回転数Nmが共振回転数領域内のときには(S110)、所定周波数Fc1より小さな所定周波数Fc2または所定周波数Fc3をカットオフ周波数Fcに設定する(S130〜S150)。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータの速度制御を行う速度PI制御部303と、モータが一定速度で回転しているときの速度制御部の出力に基づく電圧指令値を測定する電圧測定部と、測定された電圧指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、前記モータを一定速度で回転させ、一定電流量のd軸電流を流す速度指令値に基づいてモータの速度制御を行う速度PI制御部303と、モータが一定速度で回転し、一定電流量のd軸電流が流れているときの速度制御部の出力に基づく電流指令値を測定する電流測定部402と、測定された電流指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ制御装置およびトルク値取得方法
【課題】モータ制御装置において、必要メモリ容量の増大を抑制しつつ、より精度よくモータのトルク値を求められるようにする。
【解決手段】記憶部131は、トルク指令値を電流指令値に変換するための電流指令テーブルを記憶する。そして、トルク値取得部160は、当該電流指令テーブルを参照して、モータ電流値をトルク値に変換することで、モータのトルク値を取得する。トルク値取得部160は、モータ制御のために用意される電流指令テーブルを参照するので、トルク値取得のためのテーブルを別途設ける必要がない。従って、記憶部131のメモリ容量を増やす必要がない。また、トルク値取得部160は、モータMの特性を詳細に示す電流指令テーブルを参照してトルク値を求めるので、数式に基づいてトルク値を求める場合との比較において、より短い時間で、より高精度なトルク値を取得できる。
(もっと読む)
球面モータの制御装置および球面モータの制御方法
【課題】3自由度以上の回転が可能な球面モータの動作制御を直感的に把握し易い状態で行う。
【解決手段】任意の方向に回転が可能な概球回転体の運動に係る信号出力に基づき、球面モータ300のロータを動作させるために、球面モータ300の界磁コイル309への通電パターンを生成する界磁コイル通電パターン生成部201と、前記通電パターンに基づく駆動信号を出力する駆動信号出力部202とを備える。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
誤差周波数成分取得装置、回転角度取得装置、モータ制御装置および回転角度取得方法
【課題】レゾルバを用いてロータ回転角度を検出する装置において、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得られるようにする。
【解決手段】角度測定値取得部210が、モータ軸の回転角度測定値を取得し、誤差算出部220が、複数の回転角度測定値の各々に含まれる誤差を算出する。そして、周波数成分取得部230が、複数の誤差から、誤差の周波数成分の位相および振幅を求める。これによって、誤差周波数成分取得装置121は、回転角度測定値に含まれる誤差の周波数成分の位相および振幅を自動的に算出することができ、当該位相および振幅を用いて回転角度測定値に対する補正を行うことができる。従って、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得ることができる。
(もっと読む)
サーボモータ制御装置
【課題】サーボモータへ流れる大電流を検出する場合においても高精度な電流検出を行うことができるサーボモータ制御装置を得ること。
【解決手段】サーボモータ制御装置は、サーボモータに流れる電流を検出する電流検出部6を備えており、この電流検出部6が検出する電流値を用いてサーボモータの制御を行う。電流検出部6は、基板90とは別に設けられて電力供給部からの電力をサーボモータに供給するとともに電流検出の際の電流検出抵抗の役割をする抵抗兼用導体51と、この抵抗兼用導体の所定の2箇所に接続された電流検出端子58,59に出力される電圧からサーボモータに流れる電流を検出する電流検出器とを有する。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
射出成形機
【課題】整流部に流れる循環電流を抑制できる、射出成形機を提供すること。
【解決手段】モータと、前記モータを駆動する駆動回路と、前記駆動回路に電力を供給する整流器102と、前記駆動回路と整流器102との間に設けられたコンデンサ301と、前記駆動回路と整流器102との間の直流電力を交流電力に変換するブリッジ回路104と、ブリッジ回路104の交流部側に接続された高調波成分抑制部63と、整流器102に並列接続された回生経路82とを有し、ブリッジ回路104と高調波成分抑制部63とを回生経路82に備える、射出成形機あって、ブリッジ回路104を構成する複数のスイッチング素子は、コンデンサ301の電圧が所定値以上のとき、前記モータの電力を回生するようにオン/オフし、コンデンサ301の電圧が前記所定値未満のとき、全てオフする、ことを特徴とする、射出成形機。
(もっと読む)
ショベル
【課題】電動発電機の異常をより柔軟に検出可能なショベルを提供すること。
【解決手段】本発明に係るハイブリッド式ショベルは、エンジン11により発電機として駆動される電動発電機12を備えるショベルであって、電動機として機能する電動発電機12の入力を表す入力物理量を取得する入力物理量取得部300と、入力物理量取得部300が取得する入力物理量に対応する、電動機として機能する電動発電機12の出力を表す出力物理量を取得する出力物理量取得部301と、出力物理量に対する入力物理量の割合に基づいて電動発電機12の異常を検出する電動発電機異常検出部302とを備える。
(もっと読む)
1 - 20 / 223
[ Back to top ]