
Fターム[5H501KK04]の内容
Fターム[5H501KK04]の下位に属するFターム
計算機を用いるもの (470)
Fターム[5H501KK04]に分類される特許
1 - 20 / 32
モータ制御装置およびモータ制御方法
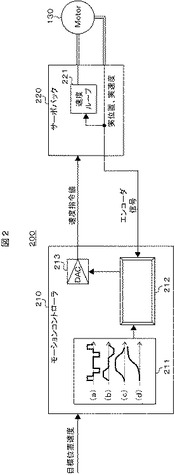
【課題】動作中の進行方向に対する振動や偏差を抑えることにより、整定時間を短くすることが可能なモータ制御装置およびモータ制御方法を提供することにある。また、本発明により、理想的な軌跡でモータを動作させることができ、さらに、現在の位置を常にモニタリングすることができるため、複数の軸を同期させて動作させることが容易となる。
【解決手段】進行方向に対する振動に大きく影響する加加速度データからの指令波形を生成する手段と、偏差量に応じて、常に加加速度制限しながら今後の指令波形を再生成するリアルタイム実位置制御を行う手段とを備え、これにより高速でモータが動作する際の進行方向に対する振動や偏差を抑える。
(もっと読む)
モータ制御回路

【課題】簡素なデジタル回路を用いて構成され、広範な制御レンジでゲインを調整可能なモータ制御回路を提供する。
【解決手段】モータ駆動制御部90は、トルク指令データと第3の基準クロックとに応じて、モータ100を駆動する。トルク指令データは、第1の基準クロックとFG信号とに応じて速度誤差検出部40が出力する速度誤差データと第2の基準クロックとFG信号とに応じて位相誤差検出部60が出力する位相誤差データとが加算回路80で加算されて生成される。速度誤差データ及び位相誤差データは、それぞれ、速度検出用値設定部51及びカウント値設定部53、又は位相検出用値設定部71及びカウント値設定部73により設定される所定の範囲で出力される。第3の基準クロックの周波数を固定したままの広範な制御レンジで、第1及び第2の基準クロックの周波数を調整することによって、制御ゲイン及び制御範囲を設定できる。
(もっと読む)
適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法
【課題】制御帯域を広げたときに生じる振動周波数成分を抑制するよう自動的にノッチフィルタを調整する。
【解決手段】適応ノッチフィルタは、共振が生じ得る制御対象への制御入力を生成するための信号に含まれる当該制御対象の固有振動数成分を抑制するためのノッチフィルタと、ノッチフィルタの中心周波数及びノッチ幅を含むパラメタを調整するためのパラメタ調整部と、を備える。パラメタ調整部は、制御対象の制御帯域を広げたときに生じた振動周波数成分とノッチフィルタの中心周波数との関係に応じて、調整されるべきノッチフィルタのパラメタを選択する。
(もっと読む)
モータの制御装置及びファンフィルタユニットの制御装置
【課題】ファンフィルタユニット等の制御装置において、モータおよびモータ制御装置に異常が発生した場合の緊急時において即座に異常を把握し迅速にかつ状況に応じたきめ細やかなモータの制御を実施する。
【解決手段】通信機能を無線化したFFU監視制御システムでは、上位装置101と中継局102、103、104とは有線の通信ケーブル107で接続され、中継局102、103、104は自分の管理するFFUグループ110、120、130のFFU115a〜n、125a〜n、135a〜nと無線で通信することでモータの制御を行い、これら上位装置101、中継局102、103、104、FFUのモータ制御部の通信部にはMACアドレスといった独自の局番を予め持つためにアドレス設定作業を省略することができる。
(もっと読む)
モータ用位相同期回路及びそれを用いたスピンドルモータ
【課題】入力信号の周波数が変化するようなモータの駆動制御において、ステップ入力などのように入力信号の位相が急激に変化した場合でも、オーバーシュートやスリップによる振動などの過渡的な振動の発生を抑制することができる多重PLL回路の構成を得る。
【解決手段】第2PLL21の第2位相比較回路24によって検出される位相差が所定範囲外である場合には、ループ加算器26を介さずに、第1PLL11を用いて第2PLL21のモータ部22を制御する一方、上記位相差が所定範囲内である場合には、上記ループ加算器26を介して上記第1PLL11と上記第2PLL21とを接続して多重PLL回路を構成するように、信号経路切換部33によって、該第1及び第2PLL11,12の信号経路を切り換える。
(もっと読む)
電動機制御装置
【課題】指令情報の種類にかかわらず、情報伝達処理を行うことができる電動機制御装置を提供する。
【解決手段】入力指令情報に基づいて電動機Mを駆動制御する電動機制御装置であって、外部から入力される複数の指令情報と、外部へ出力する複数の電動機の状態情報とを送受信するデータ通信部1と、外部からアナログ信号及びパルス列信号の一方の入力信号が入力される信号入力部2と、信号入力部2に入力される入力信号に対応する出力信号を出力する信号出力部3とを備え、前記データ通信部1と前記信号入力部2及び前記信号出力部3とを選択する信号選択部4と、該信号選択部4に接続された前記電動機Mを駆動制御する電動機制御部5とを備えている。
(もっと読む)
モータ用位相同期回路及びそれを用いたスピンドルモータ
【課題】入力信号の周波数が変化するようなモータの駆動制御に対して、多重PLL回路を適用可能な回路構成を得る。
【解決手段】発振信号を出力する発振器12及び該発振信号と入力信号との位相差に対応する信号を出力する第1位相比較回路14を有する第1PLL11と、入力に応じて回転制御され且つ回転子の回転位置を信号出力するモータ部22及び該モータ部22からの出力信号と入力信号との位相差に対応する信号を出力する第2位相比較回路24を有する第2PLL21と、上記第1PLL11及び第2PLL21が上記入力信号の入力側に対して互いに並列に接続されるように、互いの位相比較回路14,24の出力同士を加算する加算器26と、を備える。上記第1PLL11の発振器12の入力側及び上記第2PLL21のモータ部22の入力側には、それぞれ、ループフィルタ15,25を設ける。
(もっと読む)
モータ制御装置及びモータ制御システム
【課題】指令出力装置がステップ状の位置指令を出力する場合において、例えばアプリケーションによって多様な値となりうる移動量に対してもトルク制限を超過せずに、位置決め動作の精度を向上させることができ、かつ、比較的小さな移動量の場合でも高速な位置決め動作が可能な、モータ制御装置及びモータ制御システムを提供すること。
【解決手段】モータ制御装置1は、指令出力装置2から出力されたステップ状の位置指令をフィルタリングする位置指令フィルタ7と、フィルタリングされた位置指令にモータ位置が追従するようにモータ3を制御するためのトルク指令を出力する制御部9と、トルク指令に基づいた電圧指令をモータ巻線に印加する電力変換部10と、指令出力装置2からの位置指令から、モータ3の移動量を算出する移動量算出部6と、算出した移動量に基づいて、位置指令フィルタ7のフィルタ定数を設定するフィルタ定数設定部8と、を有する。
(もっと読む)
モータ駆動装置、モータ駆動システム及び電動車
【課題】モータが回転し続ける不具合を防止できるモータ駆動装置を提供する。
【解決手段】モータ18を駆動するための指令値D0を出力するモータコントローラ11と、指令値D0に基づいてモータ18を駆動するモータ駆動モジュール12とを備えたモータ駆動装置10において、モータ駆動モジュール12は指令値D0が変更されたか否かを検出する指令値変更検出部13と、指令値D0を補正する指令値補正部14とを有し、所定期間内に指令値D0が変更されていないときに指令値補正部14により指令値D0をモータ18が減速する方向に補正した補正指令値D1を導出し、補正指令値D1によりモータ18を駆動した。
(もっと読む)
サーボ解析機能を備えたシミュレーションシステム
【課題】シンボリックなモデルでシミュレーション可能なシミュレーションソフトとAD、PWM等を接続し、実機作動が可能なリアルタイムシミュレータに組み合わせることにより、容易に制御器の周波数応答等伝達関数を計測可能にするサーボ解析機能を備えたシミュレーションシステムを提供すること。
【解決手段】サーボ解析機能を備えたシミュレーションシステムは、制御器と等価な応答を実時間で演算して出力するモデルベースなリアルタイムシミュレータ1を備え、リアルタイムシミュレータ1を実機からなるモータ5(制御対象)に接続し、制御シミュレーションを行うシミュレーションシステムにおいて、リアルタイムシミュレータ1のモデル内に伝達関数計測ブロックモデル100を配置して構成される。
(もっと読む)
モータ駆動装置
【課題】回路構成が単純であってコストアップを抑制することができ、しかも故障箇所の特定が容易なモータ駆動回路を提供する。
【解決手段】A/Dコンバータ41は、モータ10に流れる電流の値をフィードバック信号Sbに変換する。制御部42は、フィードバック信号Sbと電流指令信号Saとの間の差分を演算して電圧の大きさを示す電圧指令信号Scを出力する。D/Aコンバータ43は、電圧指令信号ScをD/A変換して電圧を出力する。判定部44は、電圧指令信号Scとフィードバック信号Sbとに基づいてモータ10の故障判定を行う。
(もっと読む)
正逆転判定の誤動作防止装置
【課題】エンコーダによる検出信号を正逆転判定部に入力し、その判定信号に基づいて回転体の正逆運転を行う場合、エンコーダの出力パルスの欠落やノイズにより急激な極性変化が発生して被制御体に対し悪影響を及ぼす場合がある。
【解決手段】正逆転判定部の出力側に速度制限インターロックと信号保持回路を有する誤動作防止部を接続する。また、速度検出部の出力側に制御用速度検出信号の正逆転の切換を行う切換部と比較部を接続する。比較部はプリセット部とコンパレータを有し、プリセット部の設定値と速度検出信号との差信号に基づいて判定し、前記回転体の速度が所定値以下となったとき前記速度制限インターロックに信号を出力し、信号保持回路を介して前記切換部に切換信号を出力するよう構成した。
(もっと読む)
周波数同期ループ回路、速度ディスクリミネータ回路、モータ駆動装置
【課題】本発明は、REFCLKの逓倍を要しないFLL回路の提供を目的とする。
【解決手段】本発明に係るFLL回路12は、FGエッジが到来したときにICLKのカウントを開始し、カウント値C1がSTOP1に達したときにカウントを終了するカウンタ回路X10と;カウンタ回路X10がカウント終了したときにICLKのカウントを開始し、カウント値C2がSTOP2に達したときにカウントを終了するカウンタ回路X20と;REFCLKの一周期中に含まれるICLKのパルス数をカウントする基準カウンタY1と;REFCLKの一周期毎に基準カウンタY1のカウント値C0を格納する基準レジスタY2と;基準レジスタY2のレジスタデータREG0を分配してSTOP1とSTOP2を設定する終了カウント値設定部Y0と;カウンタ回路X10、X20の動作状態に応じて周波数誤差信号(U1、D1)を生成する論理ゲート部X30と;を有する。
(もっと読む)
電動機の制御装置及び方法
【課題】シート送り装置のスリップ及びバックラッシュを抑制し、かつ、シートをフィード設定長だけ搬送する電動機制御装置及び方法を提供する。
【解決手段】減算器47が測長ロールパルス数から送りロールパルス数を減算してパルス数偏差を求め、微分器47が時間微分して速度差を求め、BL/SL判別手段が速度差に基づいてバックラッシュ及びスリップの存在を判定する。バックラッシュ補正制御手段50が、パルス数偏差に基づいて、バックラッシュを抑制するための位相補正値を出力し、スリップ補正制御手段が、速度差に基づいて、スリップを抑制するための補正後フィーダ加速時間及びフィーダ減速ゲイン値を出力する。そして、主制御手段44が、位相補正値、補正後フィーダ加速時間及びフィーダ減速ゲイン値を用いてそれぞれ速度指令Qを求める。これにより、バックラッシュ、電動機6´の加速時のスリップ及び減速時のスリップをそれぞれ抑制する。
(もっと読む)
RDコンバータ及び角度検出装置
【課題】モータ磁界の影響によるノイズを除去し、出力角度誤差を低減する。
【解決手段】レゾルバ信号S1とsin φ、レゾルバ信号S2とcos φとをそれぞれ乗算する乗算器31,32と、乗算器32の出力から乗算器31の出力を減算する減算器33と、減算器33の出力を励磁信号を参照して同期検波する同期検波回路34と、同期検波回路34の出力が零になるようにディジタル角度出力φを制御する制御器36と、SIN ROM37とCOS ROM38とを備え、同期検波回路34の出力である制御偏差sin(θ−φ)を零にすることでレゾルバ信号S1,S2の検出角度θをディジタル角度出力φに変換するRDコンバータ30において、同期検波回路34と制御器36との間にレゾルバ信号S1,S2に重畳する低周波ノイズ成分を除去する帯域除去フィルタ35を備える。
(もっと読む)
サーボモータの駆動方法および駆動方式
【課題】コントローラとサーボモータとの間の通信速度を上げることなく、動作の高速化がなし得るサーボモータの駆動方法および駆動方式を提供する。
【解決手段】各サーボモータMの指令値を予め所定ステップ数にわったて生成し、所定ステップ数にわたる指令値を各サーボモータM側に送出し、前記指令値を各サーボモータM側でバッファ32に一時的に保持し、前記保持した指令値を所定時刻に逐次読み出して各サーボモータMを動作させるものである。
(もっと読む)
入出力装置、それを備えた電子機器、および入出力装置の制御方法
【課題】ユーザに対する感覚的な操作を向上させることを可能とする。
【解決手段】入出力装置2は、触覚的に認識可能な出力を行い、かつ、出力が行われる部位への入力操作を受け付けるジョグダイアル21と、アプリケーションの状態に対応してジョグダイアル21の回転動作を制御するモータ制御部24と、入力操作によって変更されたジョグダイアル21の回転動作を検出するエンコーダ23と、モータ制御部24が制御目標とするジョグダイアル21へのモータ出力値とエンコーダ23により検出された回転動作であるエンコーダ出力値とが不一致であるか否かを判断すると共に、モータ出力値とエンコーダ出力値とが不一致であると判断した場合、エンコーダ出力値に対応してアプリケーションの状態を制御する出力値判定部25と、を備える。
(もっと読む)
ファンフィルタユニットの制御装置
【課題】ファンフィルタユニットの風量調節を遠隔から操作する場合において、コストアップの要因になるシリアル通信やアナログ信号を用いることなく、安価な方法で実現する。
【解決手段】周期的なパルス信号の周期と電動機の回転数を一義的に関係付けて、パルス信号の周期を変化させることで、電動機の回転数を指示する。また、ファンフィルタユニットから電動機の回転数をパルス信号で出力することで、外部から電動機の回転数をモニタすることができるようにする。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】安定した品質性能が得られ、部品点数も低減されたモータ駆動制御を実現する。
【解決手段】モータ1012の回転速度を制御するモータ駆動制御装置10であって、モータ1012を回転駆動するモータドライバ1011と、第2転写ローラ113の回転速度を検出するエンコーダ1014及びカウンタ711と、当該検出された第2転写ローラ113の回転速度と、予め設定されている転写ローラ回転速度との差を算出する速度差算出部71と、速度差算出部71によって算出された速度差に対応する速度制御信号を生成し、当該生成した速度制御信号をモータドライバ1011に出力する速度制御部72とを備える。
(もっと読む)
モータ制御回路
【課題】モ―タ制御回路の全体をデジタル回路で構成することができ、構成の簡略化およびゲイン設定と回転数設定を容易に設定できることを目的とする。
【解決手段】モ―タの回転数は回転指令クロックCLKsetの周期により設定し、第3の基準クロックCLK3および第4の基準クロックCLK4の周波数を変えることにより、PWM基準信号PWMrefと速度偏差Sdifと速度判別信号Sjに応じて得られる速度偏差PWM駆動信号PWMsdifと、位相偏差Pdifと位相判別信号Pjに応じて得られる位相偏差PWM駆動信号PWMpdifのデューティを変更して、モータのPWM駆動信号PWMdrvのゲインを設定する。
(もっと読む)
1 - 20 / 32
[ Back to top ]