
Fターム[5H505JJ16]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | D→A、A→D変換回路 (173)
Fターム[5H505JJ16]に分類される特許
1 - 20 / 173
線電流推定装置および電力変換システム
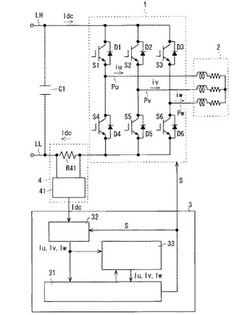
【課題】たとえスイッチングパターンが長期間に渡って維持されるとしても、その期間において線電流を得ることができる線電流推定装置を提供する。
【解決手段】線電流取得部32は、スイッチング素子S1〜S6のスイッチングパターンが変化する第1タイミングの前後において電流検出部4によって検出される直流電流を、スイッチパターンによって決定される第1相及び第2相の線電流として推定する。分解部34は第1相及び第2相の線電流をそれぞれ基本波成分と高調波成分とに分解する。基本波成分推定部35はこの基本波成分に基づいて、第2タイミングでの第1相及び第2相の線電流の基本波成分を推定する。高調波成分推定部36はこの高調波成分に基づいて、第2タイミングでの第1相及び第2相の線電流の高調波成分を推定する。合成部37は推定した基本波成分と推定した高調波成分とを加算して、第2タイミングでの第1相及び第2相の線電流を推定する。
(もっと読む)
線電流検出装置および電力変換システム

【課題】たとえスイッチングパターンが長期間に渡って維持されるとしても、線電流を得ることができる線電流検出装置を提供する。
【解決手段】スイッチング制御部31はスイッチング素子S1〜S6のスイッチングパターンを制御して相電圧を交流線Pu,Pv,Pwに印加させる。相電圧は交流の1周期において略1パルス波形を有する。電流検出部4は直流線LH,LLを流れる直流電流Idcを検出する。線電流取得部32はスイッチングパターンが変化する第1タイミングの前の第1時点において検出された直流電流Idcを第1時点でのスイッチングパターンによって決定される第1相の線電流として推定し、第1タイミングの後の第2時点において検出された直流電流Idcを第2時点でのスイッチングパターンによって決定される第2相の線電流として推定する。
(もっと読む)
電動パワーステアリング装置
【課題】1シャント式電流検出回路でモータ各相電流の検出を行うと共に、電流検出回路の故障(異常)を簡易な構成で確実に行い、安全性を高めた電動パワーステアリング装置を提供する。
【解決手段】インバータに接続された1つのシャント抵抗と、シャント抵抗の両端に正方向に接続され、モータの相電流を検出してアシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、シャント抵抗の両端に逆方向に接続され、制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式でモータの各相電流を検出してアシスト制御を行うと共に、シャント抵抗の両端電圧を増幅する回路を2系統とする。
(もっと読む)
モータ駆動装置及びモータ駆動装置の制御方法
【課題】キャリア三角波に同期した正弦波状のレゾルバ励磁信号を生成することが可能なモータ駆動装置、及びモータ駆動装置の制御方法を提供する。
【解決手段】PWM変調したモータ電流を3相モータM1に供給するインバータ13と、3相モータM1に流れる電流を検出する電流検出センサとを備え、レゾルバ14を用いて3相モータM1の電気角を検出する。そして、PWM変調に用いるキャリア三角波の周期が変更された場合には、この周期の変更に伴ってレゾルバ14に供給するレゾルバ励磁信号を生成するための励磁信号指令値、及び励磁信号生成用三角波の周期を変更する。そして、これらの励磁信号指令値、及び励磁信号生成用三角波を用いてレゾルバ励磁信号を生成するので、キャリア三角波の谷とレゾルバ励磁信号のピークを合わせることができ、電流リップルを抑制し高精度な電流制御が可能となる。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
排熱回収装置
【課題】タービンで発電した電力でコンプレッサを駆動して排熱回収することができ、コンプレッサの制御が容易であり、かつ排熱を回収するために複数のタービンを必要とする場合への適用が容易である排熱回収装置を提供する。
【解決手段】直流バス5の直流電圧を検出する電圧検出器12と、直流電圧に基づいて算出されたコンプレッサ8A,8Bの回転速度指令値16A,16Bをインバータ6A,6Bに出力する回転速度指令器13とを備える。
(もっと読む)
モータの駆動装置、インバータ制御方法及びプログラム、空気調和機
【課題】モータを駆動させず、かつ、マイグレーションを速やかに解消すること。
【解決手段】直流電力を交流電力に変換し、空気調和機の圧縮機に設けられる圧縮機モータ5に交流電力を供給する複数相のインバータ3と、圧縮機モータ5の回転数に基づいて圧縮機モータ5の巻線を発熱させるホットスタンバイ制御と、V/f制御とを切り替えてインバータ3を制御するMPU7とを具備し、MPU7は、ホットスタンバイ制御を有効にする指令を取得した場合には、圧縮機モータ5の初期励磁後に、ホットスタンバイ制御を選定し、インバータ3の各相から圧縮機モータ5に対し、継続的に直流電流を供給するようにインバータ3を制御する。
(もっと読む)
鞍乗型車両
【課題】インバータの大型化を抑えつつインバータの故障を防止できかつモータの巻線を円滑に切り替えることができる、乗り心地の良い鞍乗型車両を提供する。
【解決手段】自動二輪車10は、切り替え可能な巻線を有するモータ18と、アクセルグリップ22と、アクセルグリップ22からの指示に基づいて制御信号を出力する制御部20と、制御部20からの制御信号に基づいてモータ18に出力電圧を供給するインバータ14と、巻線を切り替えるスイッチ16a〜16cと、モータ電流を検出する電流センサ24a,24bと、モータ18の位相を検出するエンコーダ26とを備える。制御部20は、巻線の切り替え条件が成立したとき、アクセルグリップ22からの指示に係わらずモータ電流が0になるように、モータ電流とモータ18の位相とに基づいてインバータ14のデューティー比を調整する。デューティー比調整期間中に巻線を切り替える。
(もっと読む)
電子制御装置およびモータ制御装置
【課題】アナログ変換処理の実行周期はアナログ変換処理を行う制御装置内で定められる所定周期ではなく、インバータ等の制御対象に入力される信号と共通のタイミングでアナログ変換処理を行わなければ、電流制御の精度やモータ制御の効率低下を招いてしまう。
【解決手段】電子制御装置内において一定周期で発生する動作開始トリガにより、予め登録されているアナログ信号のアナログ変換処理をシーケンシャルに実行する、第一のアナログ変換機能と、前記電子制御装置外部と共通のタイミングで発生する動作開始トリガにより、予め登録されているアナログ信号のアナログ変換処理をシーケンシャルに実行する、第二のアナログ変換機能と、を備え、前記第一のアナログ変換機能よりも前記第二のアナログ変換機能の処理機能の優先度を高くする。
(もっと読む)
モータ制御装置
【課題】トルク応答性の遅れを抑制するモータ制御装置を提供する。
【解決手段】モータ10の回転速度を検出するモータ回転速度検出手段と、外部から入力されるトルク指令値及び前記回転速度に基づき、所定の上限電流値の範囲内である、第1の励磁電流指令値及びトルク電流指令値をそれぞれ演算する電流指令値演算手段と、前記第1の励磁電流指令値の位相を進めて第2の励磁電流指令値を演算することで、前記モータのロータ磁束の遅れを補償する補償手段と、前記上限電流値及び前記トルク電流指令値に基づいて、前記励磁電流指令値の上限値である上限励磁電流指令値を演算する上限励磁電流指令値演算手段と、前記第2の励磁電流指令値を、前記上限励磁電流指令値以下に制限することで、第3の励磁電流指令値を演算する励磁電流指令値制限手段と、前記第3の励磁電流指令値及び前記トルク電流指令値に基づいて前記モータを制御するモータ制御手段と、を備える。
(もっと読む)
初期補正機能を有するモーター駆動装置及び方法
【課題】本発明は、初期補正機能を有するモーター駆動装置及び方法に関する。
【解決手段】本発明の一実施形態によるモーター駆動装置は、モーターの駆動電流を提供するインバーターを介して当該モーターに流れる駆動電流に対応する電圧を検出する電流検出部と、当該電流検出部によって検出された検出電圧のピーク値を検出するピーク値検出部と、当該ピーク値検出部からの検出電圧をデジタル信号に変換するA/D変換部と、上記モーターの駆動開始時点から既設定された時間までの初期駆動区間に当該モーターを駆動させて上記A/D変換部からのデジタル信号に基づいて当該モーターの駆動電流のオフセットを補正する駆動制御部と、を含むことができる。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
駆動信号生成回路
【課題】処理負荷を抑制しつつモータの回転を安定化させることができる駆動信号生成回路を提供する
【解決手段】駆動信号生成回路は、電流検出部と、d軸電流及びq軸電流を算出する算出部と、三相モータの回転速度を示す速度信号と、三相モータの目標回転速度を示す目標信号とに基づいて、q軸電流の第1基準値を示す基準信号出力部と、d軸電流の電流値及び第2基準値の誤差に応じた第1制御信号出力部と、q軸電流の電流値及び第1基準値の誤差に応じた第2制御信号出力部と、三相モータを駆動する駆動回路に対し、第1及び第2制御信号に基づいて、d軸電流が第2基準値となり、q軸電流の電流値が第1基準値となるような駆動信号を出力する駆動信号出力部と、三相モータの回転速度が所定の回転速度となった後に、第2制御信号に基づいて、第2制御信号のリップルが小さくなるよう検出出力を調整する調整部と、を備える。
(もっと読む)
永久磁石同期モータの制御装置
【課題】モータを駆動しつつモータ定数を迅速に同定し、電流検出手段のオフセット値を同定して除去可能とする。
【解決手段】モータの速度及びd,q軸電圧を入力としてd,q軸推定電流を演算する電流シミュレータ9と、d軸検出電流が零となるようにモータを定速制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の自己インダクタンスノミナル値を調整して自己インダクタンスを同定し、d軸検出電流が所定値となるようにモータを制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の電機子抵抗ノミナル値を調整して電機子抵抗を同定し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数を同定し、d軸推定電流と検出電流との偏差、及び、q軸推定電流と検出電流との偏差から、電流検出手段のオフセット値を同定する同定手段10と、を備える。
(もっと読む)
インバータ制御装置及びインバータ制御方法
【課題】安定な制御系である、インバータ制御装置及び制御方法を提供する。
【解決手段】 直流電源から入力される直流電力を交流電力に変換し、モータに供給するインバータ6と、インバータ6から出力される交流電圧の指令値を、交流電流の検出値に基づき算出する指令値算出手段と、指令値の位相又は検出値の位相を補償する位相補償手段と、位相補償手段により補償された指令値又は検出値に基づき、インバータ6を制御するインバータ制御手段と、モータ8の回転速度を検出するモータ回転速度検出手段とを備え、位相補償手段は、所定の位相余裕を得るために設定された位相補償時間及び回転速度に基づき位相進み量を算出し、位相進み量に応じて、モータ8の固有の特性に基づく位相を補償する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
電力変換装置、および、それを用いた空調機,洗濯機
【課題】PHM制御時には、電力変換回路を制御するパルス波形が非周期となるため、直流母線電流より2相分の相電流情報が得られない区間が発生し、電流再現が困難となる。また、PHM制御時に一定間隔で直流母線電流検出を行った場合、特定の相電流情報を連続して得られない区間が発生し、電流再現が困難となる。
【解決手段】電動機に流れる交流電流を検出する電力変換装置であって、非周期パルスを出力する第一のパルス制御回路と、前記非周期パルスを用いて、直流電力を交流電力に変換する、または、交流電力を直流電力に変換する電力変換回路と、該電流変換回路の直流母線電流を検出する直流母線電流検出回路と、該直流母線電流検出回路で検出された直流母線電流を、前記非周期パルスを基にサンプリングしてベクトル制御を行い、前記パルス制御回路への指令電圧を作成する制御回路と、を具備する電力変換装置。
(もっと読む)
モータ駆動装置
【課題】高速で逆回転しているモータを起動した時でも、モータの電流を許容値以下に抑制してインバータやモータを過電流から保護する。
【解決手段】インバータ20を制御する制御手段と、直流母線41を流れる電流を検出する電流検出器61と、直流母線41に流れる電流の制限値として、第1の電流制限値とこれよりも大きい第2の電流制限値とを保持する電流制限保持部72と、モータ30の起動時に第1の電流制限値を設定し、モータ30の回転速度・回転方向・位置を推定した後に第2の電流制限値を設定する電流制限判断部73と、を備え、制御手段は、モータ30の起動時に、直流母線41の電流が第1の電流制限値を超えないようにインバータ20を制御し、かつ、モータ30を起動した後の通常運転時には、直流母線41の電流が第2の電流制限値を超えないようにインバータ20を制御する。
(もっと読む)
インバータ装置
【課題】 製造に伴う負担を減少し得るインバータ装置を提供する。
【解決手段】 インバータ装置12は、スイッチング素子31〜36と、温度検出素子41〜46と、駆動IC51〜56と、温度IC61とを備える。駆動IC51〜56は、スイッチング素子31〜36のそれぞれに設けられる。温度IC61は、スイッチング素子31に設けられ、駆動IC51〜56とは異なるデバイスとして構成される。駆動IC51〜56は、それぞれ、外部から信号を入力するための入力ポートを有している。温度ICが設けられていないスイッチング素子32〜36においては、駆動IC52〜56の入力ポートは、温度検出素子42〜46から出力される順方向電圧を入力するポートとして使用されている。温度IC61が設けられているスイッチング素子31においては、駆動IC51の入力ポートは、温度IC61から出力される通知信号を入力するポートとして使用される。
(もっと読む)
モータ制御装置及びモータの絶縁劣化検出方法
【課題】ブートストラップ回路を半導体スイッチのドライブ回路に適用できる絶縁抵抗検出機能を備えたモータ制御装置を提供することにある。
【解決手段】電圧分圧回路7が、負極直流出力部4Bの一方とグランドとの間にリレー接点からなる常開スイッチ回路SWを介して配置されている。検出動作制御部8は、遮断器2が開状態になっているときに、常開スイッチ回路SWを閉状態にする。そして検出動作制御部8は、インバータ回路5中の一つのアーム回路51〜53の一対のトランジスタTR1及びTR5の一方をオン状態にして他方をオフ状態にし、その後一方をオフ状態にして他方をオン状態にする駆動を同じデューティ比のPWM信号を用いて繰り返す検出動作を行う。そして絶縁抵抗検出部9が、電圧分圧回路7から出力された分圧電圧とインバータ回路5に入力される直流電圧とに基づいて絶縁抵抗を検出する。
(もっと読む)
1 - 20 / 173
[ Back to top ]