
Fターム[5H505LL25]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 電気的変量の検出 (3,888) | 逆起電圧 (74)
Fターム[5H505LL25]の下位に属するFターム
Fターム[5H505LL25]に分類される特許
1 - 20 / 69
同期電動機の制御システム
【課題】
同期電動機を120度通電方式から180度通電方式に切り替える際に、切換速度より小さい速度付近で120通電方式のでは電流位相が進んで力率が悪化する問題があった。停止状態から中高速域に至る広い速度範囲において、トルクショックの小さいシームレス駆動を行うことができる同期電動機の制御システムを提供する。
【解決手段】
同期電動機を120度通電方式で起動し、その後、180度通電方式に切り替えて駆動する制御システムで、120度通電方式から180度通電方式へ切り替える際に、120度通電中の力率を改善する力率改善手段を設け、この力率の改善された120度通電方式から180度通電方式に切り替えて同期電動機を駆動する。
(もっと読む)
回転子に永久磁石を用いた電動機の特性判定方法

【課題】回転子に永久磁石を用いた電動機の特性を、例えば整備後に容易に確認することが可能な判定方法を提供する。
【解決手段】電動機11を回転駆動源12に接続し、電動機11の無負荷の発電電圧とその時の回転速度Nを計測し、予め電動機11に設定されている誘起電圧算出式によって算出される基準値Eと比較し、電動機11の良否を判定する。ここで、誘起電圧算出式はE=(ke20)×N、(ke20)={0.0012×(θ−20)+1}×(ke)であり、(ke20)は20℃に補正した誘起電圧定数、0.0012は温度係数、θは電動機11の継鉄の温度、keは電動機11によって設定される誘起電圧定数である。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
モータ制御装置
【課題】電流によるインダクタンス変動に追従した電流指令を生成して、トルク制御の精度を向上させる。
【解決手段】電流指令ベクトルの向きを示す電流位相角βrefとトルク指令Trefとを入力し、電流位相角βrefの示す方向を向く複数の電流指令ベクトルのうち、トルク指令Trefに対応する総合トルクを発生させ得る電流指令ベクトルを示すd軸電流指令Id及びq軸電流指令Iqを生成する電流指令生成部24を備え、モータに流れる電流値に応じて変化するd軸及びq軸のインダクタンス(Ld,Lq)を電流値Iaに関連付けたインダクタンス情報Da3を予め設定しておき、d軸及びq軸の電流指令(Id,Iq)を生成するにあたり、既に出力したd軸及びq軸の電流指令(Id,Iq)によってモータに流れたとみなせる電流値Iaに対応するd軸及びq軸のインダクタンス(Ld,Lq)を用いてd軸及びq軸の電流指令(Id,Iq)を生成する。
(もっと読む)
モータ制御装置
【課題】モータ制御が停止している期間においても、モータ回転角度に対して信頼性を確保しながら、モータ回転角度の演算を低消費電流で継続する。
【解決手段】主演算手段101は、ブラシレスモータ5を制御する第1の動作状態と、モータ制御を停止する第2の動作状態をとる。副演算手段102は、第1の状態において、第1監視手段106で主演算手段101を監視し、第2の状態においてモータ回転角度の演算をする。これにより、モータ制御停止時においてもモータ回転角度の演算が継続できる。また、副演算手段102は、第2監視手段201で監視し、信頼性を確保する。さらに、第2の動作状態において、第1の動作状態の第1演算周期より長い第2演算周期にてモータ回転角度の演算を行うことで、消費電流が低減可能となる。
(もっと読む)
駆動装置
【課題】電動機の永久磁石に減磁が生じているか否かをより適正に判定する。
【解決手段】モータの回転数Nmと所定誘起電圧係数φsetとから得られる想定誘起電圧Viestがバッテリの端子間電圧Vbより大きく最大許容電圧VHmax以下のときには(S100〜S120)、インバータのトランジスタと昇圧コンバータのトランジスタとをゲート遮断し(S130)、その状態で得られるコンデンサの電圧VHを無負荷誘起電圧Vinlとして設定し(S150)、無負荷誘起電圧Vinlとモータの回転数Nmとから得られる実誘起電圧係数φを所定誘起電圧係数φsetから減じた値と閾値φrefとの比較によってモータの永久磁石に減磁が生じているか否かを判定する(S160〜S190)。
(もっと読む)
モータ制御装置
【課題】簡単な構成および制御によって効率の良い運転を可能にする。
【解決手段】モータ制御装置は、回転数の設定のための指令が与えられたことに応じて、同期モータを駆動するための駆動波データに基づく駆動電圧信号を複数相の各相ごとに生成する電圧信号生成部と、特定相のモータ電流を検出するモータ電流検出部21と、生成された特定相の駆動電圧信号と、モータ電流検出部21から出力されたモータ電流信号との位相差を検出して位相差情報を出力する位相差検出部と、特定相の駆動電圧信号の電圧振幅値、同期モータの誘起電圧振幅値、および検出された位相差情報から電圧位相を推定する部分と、推定された電圧位相から、位相差情報が示す位相差を減算した値を0とするための調整用電圧信号を生成する部分とを備えて、生成された調整用電圧信号を駆動電圧信号に帰還させる。
(もっと読む)
回転機の制御装置
【課題】d軸方向に高周波電圧信号を重畳し、これに伴ってモータジェネレータ10を流れる高周波電流に基づき回転角度θを推定する方式の場合、回転角度θの推定に際してノイズが生じること。
【解決手段】角度推定部40では、拡張誘起電圧に基づき回転角度を推定する。ここで、モータジェネレータ10に印加される電圧の高周波成分は、インバータIVの現在の操作状態を表現する電圧ベクトルViから指令電圧vdr,vqrを減算したものとなる。これに伴ってモータジェネレータ10を流れる電流に生じるリプルに基づき、拡張誘起電圧におけるq軸電流の微分値に比例する量を算出することで、回転角度θを推定する。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合の電気角の推定精度を向上させる。
【解決手段】電気角推定部110は、操舵トルクTrによりモータの第1推定回転方向d1を推定する第1回転方向推定部111と、誘起電圧ベクトルの移動方向からモータの第2推定回転方向d2を推定する第2回転方向推定部114と、第1推定回転方向d1と第2推定回転方向d2とを選択的に切り替える回転方向修正部115とを備える。回転方向修正部115は、第1推定回転方向d1と第2推定回転方向d2とが相違する場合、誘起電圧ベクトルの向く方向から決まる第2推定電気角と、モータ制御で使用している推定電気角θebとが一致したタイミングで、最終推定回転方向dxを第2推定回転方向d2に切り替える。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備え、前記モータ相対角度情報算出部は、前記操舵トルクに基づいてモータ相対角度変化量を算出し、算出したモータ相対角度変化量を前回サンプリング時のモータ相対角度に加算してモータ相対角度を算出する補完用相対角度情報演算部を有し、前記モータ角速度が零近傍の不感帯内にあるときに、前記補完用相対角度情報演算部で算出したモータ相対角度に基づいてモータ相対角度情報を演算する。
(もっと読む)
電力変換装置
【課題】電力変換器に対するエネルギ蓄積用のコンデンサが過電圧レベルを超えた際に、電力変換器の素子の損傷を防止しつつコンデンサの電荷を放電し、かつ小型、軽量化、コストダウンを図る。
【解決手段】コンデンサ5の過電圧検出に応じて過電圧検出手段20からの過電圧検出信号Sovで電力変換器3の動作停止、断流器4をオフし、同期機2の誘起電圧Vmよりも電圧検出手段10で検出されるコンデンサ5の充電電圧Vcが大きく、かつ過電圧検出信号Vovが出力されている場合に過電圧抑制手段30からの過電圧抑制信号Sccでスイッチング素子7をオンにしてコンデンサ5を放電する。また電流検出手段16で検出される同期機2を流れる電流Iuが基準値Imaxよりも大きい場合には、上記過電圧抑制信号Sccを強制的に遮断してスイッチング素子7をオフにしてコンデンサ5の放電を停止する。
(もっと読む)
駆動装置の制御装置
【課題】可変磁束型の回転電機を備えた駆動装置を制御する制御装置の規模を増大させることなく、誘起電圧をインバータの耐圧の限度内に収めることができる技術を提供する。
【解決手段】永久磁石を備えたロータとコイルを備えたステータとを有する回転電機と、界磁束を変化させる界磁調整機構と、インバータとを備えた駆動装置を制御する駆動装置の制御装置は、直流の主電源との遮断条件が成立した際に、ロータの回転によりコイルに誘起される誘起電圧がインバータの耐圧を越える過電圧状態であると判定されている場合は、少なくとも過電圧状態が解消されるまで、遮断条件に拘わらず主電源との接続を維持すると共に、界磁束を弱める弱め界磁電流をコイルに供給する弱め界磁制御により回転電機を制御し、過電圧状態が解消された後に遮断条件に従って主電源を遮断する。
(もっと読む)
モータ制御装置、モータ制御システム、モータ制御プログラム
【課題】運転モードに応じてモータの駆動を高効率で制御可能なモータ制御装置を提供する。
【解決手段】電流指令ベクトルの向きに応じた抑制電流成分によって抑制された後の誘起電圧を電圧検出部で検出される電源電圧Vbatよりも小さくする方向に抑制する第1電流指令ベクトルAvを決定する第1電流指令ベクトル決定部2aと、実測値に基づき予め記憶させている効率情報において回転数検出部で検出した回転数と外部から指示されたトルク指令Trefとに関連付けられた第2電流指令ベクトルAbaseを決定する第2電流指令ベクトル決定部2bとを備え、トルク出力優先モード時は第1電流指令ベクトルAvでモータの駆動を制御し、効率優先モード時は第2電流指令ベクトルAbaseでモータの駆動を制御するように構成した。
(もっと読む)
制御装置
【課題】装置の小型化を図ること。
【解決手段】制御回路100は、CPU10と、CPU10で動作させる第1のプログラムを記憶するフラッシュメモリ22を有するCPU20と、第1のプログラムをCPU10に読み込ませる第2のプログラムを記憶するROM33とを有している。CPU10は、読み出した第2のプログラムを実行することで第1のプログラムの読み込み準備完了をCPU20に通知する。CPU20は、第1のプログラムの読み込み準備完了に基づいて、CPU10への第1のプログラムの転送を開始する。
(もっと読む)
モータ駆動制御装置
【課題】鎖交磁束の波形に含まれる高調波成分の影響を除去してトルクリプルを抑制できるモータ駆動制御装置を提供する。
【解決手段】モータ駆動制御装置において、回転子の角度検出値に基づいて変化するd軸交流信号をコイルに流すd軸電流の目標値であるd軸電流目標値に加算し、前記角度検出値に基づいて変化しd軸交流信号に対して1/4周期の位相差をもつq軸交流信号をコイルに流すq軸電流の目標値であるq軸電流目標値に加算する加算手段を有する。そして、d軸交流信号が加算されたd軸電流目標値に追従するようにd軸電流を制御し、q軸交流信号が加算されたq軸電流目標値に追従するようにq軸電流を制御する。
(もっと読む)
交流モータおよび電源装置
【課題】モータの制御回路などの電源を簡略化すること。
【解決手段】ステータコアティースに巻き回されたモータ励磁巻線31−1,31−2を有する交流モータ1のモータ部16において、モータ励磁巻線31−1,31−2と共にステータコアティースに巻き回されてモータ励磁巻線31−1,31−2に通電される交流電圧によって発生する磁力線によって電圧が誘起される電源巻線32−1,32−2を有するモータ部16を有する構成とする。
(もっと読む)
誘導電動機の制御装置、及び誘導電動機の制御方法
【課題】電力変換部に流れる過電流を抑制する際の精度を向上できる誘導電動機の制御装置、及び誘導電動機の制御方法を得ること。
【解決手段】制御装置において、制御部は、直流電力の供給停止が第2の検出部により検出された場合、誘導電動機の残留電圧を減衰させるための電力変換部による第2の動作を開始させるとともに、比較部により用いられるべき閾値を第1の値から前記第1の値より低い第2の値に変更し、前記比較部による比較結果から電流ベクトルの大きさが前記閾値より小さいと判断される場合、前記電力変換部による前記第2の動作を停止させる。
(もっと読む)
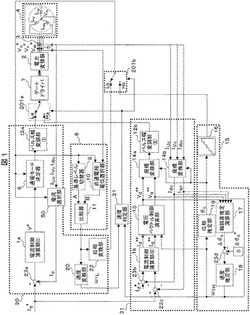
過電圧保護装置
【課題】 回生時に同期機で発生する無負荷誘起電圧による過電圧から、同期機を駆動する駆動装置内のコンデンサや電力変換器を保護する過電圧保護装置を得る。
【解決手段】 直流電源と、直流電流を交流電流に変換して同期機へ出力する電力変換器と、同期機で発生する回生エネルギーを蓄積する回生エネルギー蓄積手段と、を備える同期機駆動装置に対して、回生エネルギーによる無負荷誘起電圧を検出し、その無負荷誘起電圧に基づき、回生エネルギーを抑制させる回生電力抑制器と、回生電力抑制器からの無負荷誘起電圧に基づく指示に従い、回生エネルギー蓄積手段を放電させる放電手段と、を備える。
(もっと読む)
同期電動機のベクトル制御装置
【課題】回転速度に関わらず所定の電機子電流の範囲内で最大の出力または最大のトルクを得るようにした同期電動機のベクトル制御装置を提供する。
【解決手段】界磁巻線形同期電動機の磁束及び電流をベクトルとして扱い、電力変換装置によって電機子電流及び界磁電流を制御する同期電動機のベクトル制御装置において、磁束演算器1A内に、ベクトル演算器32、回転速度の絶対値演算器33及び第1,第2の切換器34,35を設け、電動機の低速回転時には、空隙磁束ベクトルに平行な電機子電流成分の定常値をゼロに制御し、電動機の高速回転時には、電機子鎖交磁束ベクトルに平行な電機子電流成分の定常値をゼロに制御する。
(もっと読む)
1 - 20 / 69
[ Back to top ]