
Fターム[5H505LL33]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 磁気的変量の検出(磁束、磁界) (132) | 磁束、電界 (103) | ホール素子等での直接検出 (25)
Fターム[5H505LL33]に分類される特許
1 - 20 / 25
駆動信号生成回路
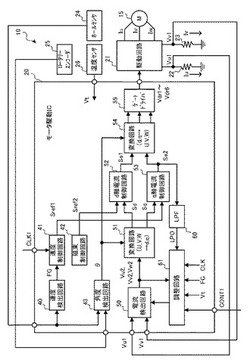
【課題】処理負荷を抑制しつつモータの回転を安定化させることができる駆動信号生成回路を提供する
【解決手段】駆動信号生成回路は、電流検出部と、d軸電流及びq軸電流を算出する算出部と、三相モータの回転速度を示す速度信号と、三相モータの目標回転速度を示す目標信号とに基づいて、q軸電流の第1基準値を示す基準信号出力部と、d軸電流の電流値及び第2基準値の誤差に応じた第1制御信号出力部と、q軸電流の電流値及び第1基準値の誤差に応じた第2制御信号出力部と、三相モータを駆動する駆動回路に対し、第1及び第2制御信号に基づいて、d軸電流が第2基準値となり、q軸電流の電流値が第1基準値となるような駆動信号を出力する駆動信号出力部と、三相モータの回転速度が所定の回転速度となった後に、第2制御信号に基づいて、第2制御信号のリップルが小さくなるよう検出出力を調整する調整部と、を備える。
(もっと読む)
トライアック整流子型電動機

【課題】 交流単相誘導電動機の代替電動機として、特開2006−180641示されているようなトライアックにより交流電源を開閉する永久磁石回転子型の電動機は効率が高く有効である。しかし、起動が不安定、トルク変動が大きい、起動電流が大きい等の課題があった。
【解決手段】 交流を電源とした永久磁石回転子型電動機の固定子の巻線の相数を2以上とし、回転子位置と交流電源の極性を検出し、トライアックを使用して電流の開閉を行い一方向のトルクを発生させることにより、起動特性が良好で、振動が小さい電動機を提供できる。かつ巻線のインダクタンスを大きくすることにより効率が高く安全な永久磁石回転子型電動機を提供できる。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】固定子コイルに相電流を流してモータを温める際に、同期モータにトルクを発生させず、回転子に加わる逆磁界を低減する。
【解決手段】モータ制御部40は、モータの回転子磁束と平行なd軸磁界成分を発生させるd軸電流目標値の瞬時値に所定しきい値よりも正側の値で、かつ、所定期間におけるd軸電流目標値の平均値がゼロより正側となる値を設定し、回転子磁束と直交するq軸磁界成分を発生させるq軸電流目標値に回転子が回転しない値を設定する目標電流設定部45と、d軸電流目標値とq軸電流目標値に基づいて、モータの固定子のコイルに駆動電流を流す制御を行う駆動制御部と、を備える。
(もっと読む)
電動機の駆動制御方法
【課題】モータに所定以上の負荷が作用したまま負荷保持動作に移行している間、各相コイルの発熱温度を均一化するように駆動制御する電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつモータ負荷が所定負荷以上で負荷保持状態に移行し、当該負荷保持状態に移行している間、任意のロータ回転位置から所定電気角±((180/n)°;nは相数)だけ正逆回転する動作を繰り返す。
(もっと読む)
電力変換装置及びモータ駆動制御装置
【課題】スイッチング素子の損失を低減し、スイッチング素子や放熱器の小型化を図る。
【解決手段】直流電源からの供給電力の電圧を全波整流により中間電圧に変換して出力するコンバータ回路12の出力信号に同期して当該出力信号の直流/交流変換を行って負荷である三相交流モータ15に供給するインバータ回路14と、三相交流モータ15に供給されている三相交流電力の位相、周波数、三相交流モータ15へ供給すべき三相交流電力の目標位相及び目標周波数に基づいてコンバータ回路12の出力信号の周波数を制御する周波数制御信号を出力する加算器20と、周波数制御信号に基づいてく三相交流モータ15へ供給する三相交流電力の目標位相及び目標周波数に対応する三相交流波形の全波整流波形のエンベロープ上における各相の全波整流波形の交点を基準点としてコンバータ回路12及びインバータ回路14を制御する制御部13,16とを備える。
(もっと読む)
電力変換装置及びモータ駆動制御装置
【課題】駆動状態が変化する単相交流モータを駆動するに際して、スイッチング素子の損失を低減し、スイッチング素子や放熱器の小型化を図る。
【解決手段】スイッチング素子を有し、前記直流電源からの供給電力の電圧を全波整流により中間電圧に変換して出力するコンバータ回路12と、スイッチング素子を有し、コンバータ回路12の出力信号に同期して当該出力信号の直流/交流変換を行って単相交流モータ15に供給するインバータ回路14と、単相交流モータ15の回転状態および設定された単相交流モータ15の目標回転状態に基づいてコンバータ回路12の出力信号の周波数を制御する周波数制御信号を出力する加算器20と、周波数制御信号に基づいて、コンバータ回路12およびインバータ回路14を制御するコンバータ制御部13及びインバータ制御部16を備える。
(もっと読む)
モータ制御装置
【課題】ブラシレスモータのロータの回転角を検出するために用いられる2つの正弦波信号のうちのいずれか一方に異常が発生した場合においても、正常な方の正弦波信号に基づいて、ブラシレスモータを駆動することができるモータ制御装置を提供する。
【解決手段】第2の回転角演算部33は、2つの正弦波信号V1,V2のうちの一方に異常が発生した場合に、正常な正弦波信号から予測される第1の回転角候補および第2の回転角候補のうちの一方の回転角候補を、第2の回転角θ2として演算する。ゲイン演算部35は、第2の回転角演算部33によって演算された回転角θ2に基づいて、ブラシレスモータ3によって本来発生されるべきトルクと逆方向のトルクが発生されないように、指示電流値Idq*に乗算されるべき第2ゲインG2を演算する。
(もっと読む)
モータ
【課題】モータの待機電流を低減可能な構成を、コンパクト且つ簡単な構成により実現する。
【解決手段】インバータ回路4を駆動する制御回路5と制御回路5に電流を供給する制御電源との間の電流供給経路に待機電流低減回路13を設けて、モータ本体2の駆動が停止しているときには待機電流低減回路13によって電流供給経路を遮断するようにし、待機電流低減回路13、インバータ回路4、制御回路5、及びモータ本体2を一つのモータ1に設けるようにする。
(もっと読む)
電気機械を非制限電流波形で励起させるシステム及び方法
【課題】瞬間非正弦波電流波形で電気機械を励起するシステム及び方法を提供する。
【解決手段】システムは、電気機械26内の電流の流れと端子電圧とを制御するインバータ24と、インバータ24に初期正弦波電流需要を入力し、それによってインバータ24に初期正弦波入力電流を出力させるようにプログラムされたコントローラ28とを含む。コントローラ28は更に、初期正弦波電流需要によって生成された電気機械26内の空隙磁界でフィードバックを受け、空隙磁界の瞬間基本成分と瞬間調波成分とを判定し、空隙磁界の前記瞬間基本成分に修正を加えて最適な基本成分を生成し、最適な基本成分に基づいて非正弦波電流需要を生成し、非正弦波電流需要をインバータ24に入力することによってインバータ24に非正弦波電流を出力させるようにプログラムされている。
(もっと読む)
磁束角補正機能付きモータ制御装置
【課題】磁束角の調整を予め手動で行う必要がなく、高精度に磁束角誤差を補正することができるモータ制御装置を提供する。
【解決手段】本発明に係るモータ制御装置1は、d軸電流Id及びq軸電流Iqがそれぞれ指令電流に等しくなるような第1磁束角θ1及び第1磁束角速度ω1を出力する第1検出部30と、磁電変換器15が出力する余弦波信号HS1及び正弦波信号HS2に基づいて、d軸電流Id及びq軸電流Iqがそれぞれ指令電流に等しくなるような第2磁束角θ2及び第2磁束角速度ω2を出力する第2検出部31を備え、補正モードにおいて、第1磁束角θ1及び第1磁束角速度ω1に基づいて無負荷のモータ21を等速運転させつつ第1磁束角θ1に対する第2磁束角θ2の位相のずれを測定しておき、通常モードにおいて、該ずれを補正した後の第2磁束角θ2及び第2磁束角速度ω2に基づいてモータを通常運転させる。
(もっと読む)
モータ制御装置および電気式動力舵取装置
【課題】モータトルクのばらつきを抑制し得るモータ制御装置および電気式動力舵取装置を提供する。
【解決手段】モータ30には、ステータ31の各ステータティース31bのうち、周方向中心線Lu,Lv,Lw上であって電気角で120度間隔に当該周方向中心線Lu,Lv,Lwに沿う3方向の3相磁力φu,φv,φwを検出可能な3つの磁気センサ33u,33v,33wが設けられている。これら3つの磁気センサ33u,33v,33wにより、ロータ32が発生するロータ磁力φfaやステータ磁力φdi,φqiを含むように3方向の磁力φu,φv,φwが検出されるので、これらロータ磁力φfaおよびステータ磁力φdi,φqiに基づいて実際にモータ30が出力するモータトルクTqが求められる。ECU40は、このモータトルクTqとトルク指令値Tq*とに応じた電圧をステータ31の各コイルに供給してモータ30を制御する。
(もっと読む)
磁極位置調整構造、これを備えたモータ、および磁極位置調整方法
【課題】 省スペース化、小型化が可能で、かつ調整時間短縮可能な磁極位置調整構造、これを備えたモータおよび磁極位置調整方法を提供すること。
【解決手段】 磁極位置調整構造は、磁極検出センサの磁界を調整するための可動性の調整磁石1と、モータ10のモータ軸4上であって調整磁石1との合成磁界による磁極検出センサの磁極位置調整をし得る位置に設けられる軸側磁石5とからなる。調整磁石1はダイヤル式に回転可能な構成とすることができる。
(もっと読む)
インバータ制御装置
【課題】コアレス電流センサを用いた際の検出精度の悪化の影響を無くしてモータを正常に駆動させることが可能なインバータ制御装置を提供することを目的とする。
【解決手段】コアレス電流センサ40が備えるシールド板53により生じる残留磁束の影響により出力電圧Vuv1、Vvw1に含まれる位相遅れ及びゲイン誤差が無くなるように、出力電圧Vuv1、Vvw1を補正し、その補正された補正出力電圧Vuv、Vvwと、外部から入力される指令値とに基づいて、モータインバータ41を制御する。
(もっと読む)
モータ制御装置
【課題】電流検出手段の数を抑えるとともに、電流検出手段によって検出された相電流の1つが異常になっても、全ての相電流を継続して検出することができるモータ制御装置を提供する。
【解決手段】モータ制御装置は、電力変換回路11と、電流センサ13〜15と、制御回路16とを備えている。電流センサ13〜15は、各相に1つずつ設けられている。制御回路16は、電流センサ13〜15の検出結果に基づいて電力変換回路11を制御する。電流センサ13〜15によって検出された相電流のうち1つの相電流が異常であるときには、正常に検出された相電流から異常な相に対応した相電流を求める。そして、正常に検出された相電流と、求めた相電流とに基づいて電力変換回路11を制御する。これにより、従来4個必要であった電流センサを3個に抑えるとともに、電流センサ13〜15によって検出された相電流の1つが異常になっても、全ての相電流を継続して検出することができる。
(もっと読む)
モータ特性取得装置、モータ特性を用いる制御装置、およびパワーウィンド制御装置
【課題】マグネットの着磁誤差、回転検出センサの取り付け誤差を取り除きながらも、モータの回転周期の変化に鋭敏に反応できる装置を提供する。
【解決手段】モータの回転周期がエッジ間隔時間により細分化され、各エッジ検出時に、そのとき算出されたエッジ間隔時間とその1周期前に算出された対応するエッジ間隔時間との変化率が算出される。そして、設定された基準周期にその変化率を乗算することにより、モータの回転周期を算出する。
(もっと読む)
磁極検出器付き同期電動機
【課題】磁極検出器を用いずに電動機が一定の回転動作を行なうだけで、その駆動電流や電圧などの情報から間接的に磁極位置を算出する手法では、読み取った間接情報の誤りや外乱などによって磁極位置を誤検出する可能性が残ってしまう。
【解決手段】可動子と固定子のどちらか一方に磁石が設置され、磁石の近傍に磁極検出器を備えた同期電動機において、同期電動機の可動子の位置と組み立て調整後の磁極検出器により検出された磁石の第1の磁力データとを対応づけて記憶しておく記憶手段と、運転中の同期電動機の可動子の位置に対応した磁極検出器により検出した磁石の第2の磁力データと、第1の磁力データを比較する比較手段と、第2の磁力データが第1の磁力データより所定の閾値分大きいかまたは小さい場合に磁石の異常と判定する判別手段とを有することを特徴とする。
(もっと読む)
モータ駆動装置、集積回路装置およびモータ装置
【課題】簡易な構成で回転速度に応じた進角量を設定でき、進角切替え時における回生現象に起因した過電圧から電源装置などを保護する。
【解決手段】モータ10を駆動するインバータ20と、速度偏差に基づく駆動制御信号VSPを出力する速度制御部40と、複数の進角量を選択可能なように保持し、選択された進角量を示す位相進角信号PS1を出力する進角設定部60と、進角量の選択が切替えられたとき、位相進角信号PS1が示す進角量の時間あたりの変化量の抑制した位相進角信号PS2を出力する変化量抑制部50と、駆動制御信号VSPに応じた波高値、および位相進角信号PS2に応じた位相の波形信号WFを生成する波形生成部31と、波形信号WFに応じた駆動信号によりインバータ20を駆動することで、モータ10の速度を制御するインバータ駆動部30とを備える。
(もっと読む)
パワーコンバータ
【課題】モータに電圧、周波数を提供する電源ネットワーク(バス)に調和させるパワーコンバータを提供。
【解決手段】モータ4のステータに接続された第1、2の活性整流器/逆変換装置10、14で、複数の半導体スイッチ装置を含む。これらの装置のための第1、2の制御装置18、20とを含む。第1の制御装置は所望のdcリンク電圧を示唆するdcリンク電圧要求信号VDC_MOT*を使用して、半導体パワースイッチ装置を制御している。第2の制御装置は、電源ネットワーク(バス)からdcリンク12に移されるべき電力のレベルを示唆する電力要求信号P*並びにフィルター16のネットワーク端子で達成されるべき電圧を示唆する電圧要求信号VBUS*を使用して、半導体スイッチ装置を制御し、電力および電圧要求信号に相当する電力および電圧の所望のレベルを達成する。プロペラーアセンブリー2を駆動する船舶推進システムに使用。
(もっと読む)
モータ及びモータの駆動システム
【解決課題】モータのコイルへ供給される励磁信号を制御することにより、運転効率に優
れたモータを提供する。
【解決手段】本発明のモータは、複数のコイルの組と永久磁石の組み合せを備え、このコ
イルの組は、交互の異極に励磁されるように駆動回路から励磁信号が供給されるとともに
、前記永久磁石は複数の磁極要素が交互に異極になるように配置された構造からなり、前
記駆動回路は前記コイル組に所定の周波数を持った励磁信号を供給して、前記コイルと永
久磁石間の磁気的吸引―反発によって前記コイル組と永久磁石とを相対的に移動させるよ
うに構成されてなり、さらに、前記駆動回路は前記コイル組に、当該コイル組と永久磁石
間の相対移動に応じて発生する逆起電圧のパターンに相当する波形信号を当該コイル組に
供給するように構成されてなる。
(もっと読む)
モータ駆動制御装置
【課題】ロータ・ステータ間のギャップ付近に多数の磁束センサを設置することなくベクトル制御を行えるモータ駆動制御装置を提供する。
【解決手段】磁極鉄心22と磁極鉄心22との間のバックヨーク21の最外周に磁束センサ27a,27bを埋め込み、電力変換部・制御部16において、磁束センサ27aと磁束センサ27bとの差分をもって磁極磁束検出値とし、磁極磁束検出値と磁極磁束指令値とを比較して巻き線23への印加電圧を制御する信号を生成する。
(もっと読む)
1 - 20 / 25
[ Back to top ]