
Fターム[5H540BB07]の内容
Fターム[5H540BB07]に分類される特許
1 - 20 / 41
リニアモータの制御判断方法および制御装置
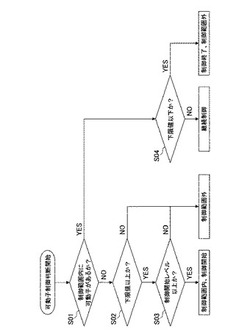
【課題】可動子を曲線状にも移動させるリニアモータにおける、制御可能性を判断する。
【課題手段】可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサの読みを用いて、(1)第1の信号の2乗と第2の信号の2乗との和を算出し、(2)2乗和が所定の値以上にあるとき、リニアモータが制御可能であると判断して、リニアモータの制御を行う。
(もっと読む)
検知方法、露光方法、及びデバイス製造方法

【課題】固定子と可動子との間の距離の変化を検知可能な検知方法、この検知方法による検知結果に基づいて基板にパターンを転写露光する露光方法、及びこの露光方法を利用してデバイスを製造するデバイス製造方法を提供すること。
【解決手段】検知方法は、第1方向に沿って配列された複数の固定子に対して可動子を第1方向に沿って第1の速度で等速移動させ、等速移動させたときの可動子の第1方向における第1の推力の大きさを検出し、複数の固定子に対して可動子を第1方向に沿って第1の速度とは異なる第2の速度で等速移動させ、等速移動させたときの可動子の第1方向における第2の推力の大きさを検出し、第1及び第2の速度と、第1及び第2の推力の大きさとを用いて、固定子と可動子との間に作用するコギング力の大きさを算出し、算出ステップによって算出されたコギング力の大きさに基づいて、固定子と可動子との間の距離の変化を検知する。
(もっと読む)
モータドライブ制御装置、モータドライブ制御方法
【課題】 モータドライブ装置の移動子の位置情報の再現性を維持しつつ、速度リップルを低減することができるモータドライブ制御装置、モータドライブ制御方法を提供する。
【解決手段】 モータドライブ装置における移動子より出力される位相のずれた2つの正弦波状信号に基づくリサージュ曲線に近似する楕円を示す楕円パラメータを算出する楕円算出部と、前記楕円パラメータにより示される楕円が真円となるように前記2つの正弦波状信号を補正する補正部と、前記補正された2つの正弦波状信号に基づくリサージュ曲線を前記移動子の移動速度を示す速度情報に変換する変換部と、前記速度情報とに基づいて、前記モータドライブ装置を制御する制御部とを有する。
(もっと読む)
ステージ装置、及びステージ装置の制御方法、それを用いた露光装置及びデバイスの製造方法
【課題】コイルに流れる電流の遅れに起因して生じる、駆動すべき方向とは異なる方向への力を低減させる。
【解決手段】コイル4、及び複数の永久磁石を有するリニアモータと、コイル4に電流を供給する電流ドライバ9と、該電流ドライバ9への指令を生成する制御手段7とを備えたステージ装置であって、制御手段7は、コイル4と永久磁石との相対位置に基づいて算出した電気角を用いた正弦波を、リニアモータへの推力指令値に乗ずるコミュテーション処理により指令を生成し、更に、指令に対して、推力指令値に比例した振幅を持ち、かつ、正弦波と90度に位相がずれた正弦波の成分を含ませる。
(もっと読む)
推力リップル解析方法及び補正方法
【課題】モータで生ずる推力リップルの解析及び補正を精確に行うことができる推力リップル解析方法及び補正方法を提供する。
【解決手段】平面モータ1は固定子としての格子プラテン10と可動子としてのスライダ部20とを備えており、モータ制御装置30の制御によってスライダ部20が格子プラテン10上で移動されるとともに位置決めされる。平面モータ1で生ずる推力リップルを解析する場合には、格子プラテン10に対するスライダ部20の位置を変えながらスライダ部20を微小振動させたときの平面モータ1の応答特性を測定し、格子プラテン10に対するスライダ部20の位置に応じた平面モータ1の応答特性の変化から推力リップルを求める。
(もっと読む)
位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】互いに直交するX軸およびY軸の少なくとも1軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の1軸方向の位置を検出するレゾルバ2と、
このレゾルバ2のスライダ1の進行方向側に隣接して配置されたレゾルバ2a,2bと、
このレゾルバ2a,2bの出力に基づいてレゾルバ2の出力を補正する補正部と、
この補正部からの出力に基づいてスライダ1の位置を算出する位置算出部と、
を備えたことを特徴とする。
(もっと読む)
磁気浮上制御装置
【課題】 任意の位置でゼロパワー制御が可能な磁気浮上制御装置を提供する。
【解決手段】 可動部,浮上アクチュエータ,位置センサ,およびコントローラとを備えた磁気浮上制御装置において、前記浮上アクチュエータは永久磁石23による吸引力または反発力を可変とした永久磁石磁力可変モータであり、該永久磁石磁力可変モータは永久磁石23による吸引力または反発力を変化させるためのアクチュエータである磁力操作モータ15を備え、コントローラ100は磁力操作モータ15の可動子位置を制御する磁力操作モータ制御器195を備え、磁力操作モータ15の可動子位置を操作することによって永久磁石磁力可変モータの発生する推力を操作する。
(もっと読む)
平面パルスモータ、露光装置およびデバイス製造方法
【課題】平面パルスモータにおける可動子の回転制御に有用な技術を提供する。
【解決手段】平面パルスモータは、可動子4および固定子12を有する。可動子4は、磁性体を含んで構成され、固定子12に対向する面に複数の凸部を有する。固定子12は、可動子4を駆動するための複数の磁気発生ユニット6a、6bを有する。平面パルスモータの制御部は、複数の磁気発生ユニット6a、6bのうち、可動子12の駆動方向に沿った可動子4の中心線Cを跨がず、かつ、可動子4が存在する領域からはみ出していない磁気発生ユニットから選択される磁気発生ユニットを動作させることによって可動子4の回転を制御する。
(もっと読む)
移動体システム
【課題】リニアモータのリニアスケールからの座標を用いて、移動体間の干渉を防止する。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のコイルを制御する。コイルのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換し、移動体の速度と先行の移動体との距離を求める。求めた距離と先行の移動体の速度とから、先行の移動体との干渉防止速度を求めて、コイルを制御する。
【効果】先行の移動体との間隔を不必要に大きくする必要が無く、システムの効率が改善する。
(もっと読む)
ステージ装置及びそれを有する露光装置
【課題】迅速、低衝撃かつ低回転力で停止可能なステージ装置及びそれを有する露光装置を提供する。
【解決手段】リニアモータ4、5によって可動部2を移動し、リニアモータ4、5が備える少なくとも一つのコイル4C1U〜Wを含む閉回路を構成してブレーキを働かせることによって可動部2を減速させるステージ装置は、閉回路内においてコイル4C1U〜Wに接続可能で、抵抗値の異なる複数の抵抗R1〜R3と、可動部2の移動速度を検出する速度検出部9と、速度検出部9の検出結果に基づいてコイル4C1U〜Wと複数の抵抗R1〜R3とを接続又は切断する切換スイッチ27と、を有する。
(もっと読む)
平面モータ
【課題】位置検出の構成を単純化して信頼性を向上させると共に、コストの低減を図ることが可能な平面モータを実現する。
【解決手段】格子状の歯が平面上に形成されたプラテンと、前記歯と対向する面モータを内蔵し前記プラテン上面を移動して位置制御されるスライダと、を具備する平面モータにおいて、前記スライダに、前記プラテンの歯と対向して前記スライダの位置を検出するレゾルバを備える。
(もっと読む)
電磁モータにより対象物を位置決めするための方法、ステージ装置およびリソグラフィ装置
【課題】 電磁モータのピッチトルクの補償を少なくとも部分的に可能にするが、既知の方法に比べより低い計算量を使用する解決策を提供することである。
【解決手段】 使用時に複数の一次力および一次力に関連付けされるピッチトルクを生成する電磁モータにより、対象物を位置決めするための方法。この方法は、対象物を位置決めするための所望の力およびトルクを決定することと、モータにより生成されるべき一次力を決定することと、一次力よりまたは所望の力およびトルクよりピッチトルクを決定することと、一次力を生成するためのモータに対する所望の信号を決定することとを含むサイクルを含む。次のサイクルにおいて、一次力の決定の前に、対象物を位置決めするための所望の力およびトルクは、前のサイクルのステップにおいて決定されたピッチトルクを使用して修正される。
(もっと読む)
リニアアクチュエータ
【課題】ヨーイング角度を規定値内に抑えた状態で、姿勢制御に要する駆動電流値を最小とすることができるリニアアクチュエータを実現する。
【解決手段】夫々に位置検出手段を備えた一対のリニアモータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、前記一対の位置検出手段の出力の和に基づき、前記スライダ間の中点位置信号を算出する中点位置検出手段と、前記一対の位置検出手段の出力の差に基づき、前記スライダ間の姿勢信号を算出する姿勢検出手段と、前記中点位置信号と位置指令信号との偏差に基づく推力指令により前記スライダを駆動する駆動電流値を操作する中点位置制御部と、制御された中点位置における最適な姿勢目標値信号を生成する姿勢目標値生成部と、前記姿勢信号と前記姿勢目標値信号との偏差および速度偏差が入力されるLQR(積分型)により演算した補正信号を利用して前記推力指令を補正する姿勢制御部と、を備える。
(もっと読む)
平面モータ
【課題】推力発生時におけるスライダの傾きを防止できる平面モータを提供する。
【解決手段】コアCX1−1,CX1−2,CX2−1,CX2−2によりスライダ3にX方向への推力が与えられている場合には、コアCY1−1,CY1−2,CY2−1,CY2−2によりスライダ3にZ軸方向(垂直方向)への推力が与えられることでトルクが打ち消される。コアCY1−1,CY1−2,CY2−1,CY2−2によりスライダ3にY方向への推力が与えられている場合には、コアCX1−1,CX1−2,CX2−1,CX2−2によりスライダ3にZ軸方向(垂直方向)への推力が与えられることでトルクが打ち消される。
(もっと読む)
アクチュエータ
【課題】簡易な構造で小型を図ることができる面移動型のアクチュエータを提供する。
【解決手段】ベース部材2と、前記ベース部材に対し、第1の軸方向Xへのスライドを可能に配置した第1のスライダ10と、前記ベース部材に対し、前記第1の軸方向とは垂直な第2の軸方向Yへのスライドを可能に配置した第2のスライダ20と、前記第1のスライダ10と第2のスライダ20との交差位置に、当該第1のスライダ及び第2のスライダに摺動自在に嵌合して平面内を移動可能な移動片30と、前記第1のスライダ10及び第2のスライダ20それぞれの一端に固定された磁石MG−1、MG−2と、前記それぞれの磁石が内部空間を移動するように配置したコイル15、25とを備えているアクチュエータである。
(もっと読む)
モ−タ駆動装置とそれを用いた露光装置
【課題】電源部とモ−タ駆動回路部等が一体的に筐体に配置されている回路構成と配線を、筐体のみそれぞれ別途分離したアンプラックを構成すると、分離された複数の電源部と複数のモ−タ駆動回路部等が、無秩序に配置され、散乱し、配線の引き回し等の無駄を生じる。
【解決手段】複数のモ−タにより駆動される駆動対象物と、モ−タを駆動するモ−タ駆動装置と、モ−タ駆動装置に電力を供給する電源部アンプユニットと、を備える露光装置であって、駆動対象物を駆動する複数のモ−タは、モ−タごとに各々一のモ−タ駆動回路を備え、モ−タ駆動回路は、駆動対象物の用途及び/又は目的ごとに、一の電源部アンプユニットに接続される露光装置とする。
(もっと読む)
位置決め装置、露光装置及びデバイス製造方法
【課題】装置全体が軽量化され、メンテナンス性を向上させた位置決め装置を提供する。
【解決手段】位置決め対象物を搭載して移動する第1ステージである微動ステージ4と、前記第1ステージを搭載して移動する第2ステージである粗動ステージ21と、前記第2ステージを駆動するリニアモータ1,2とを備え、前記第2ステージである粗動ステージ21は少なくとも一対に非接触に分割して配置され、前記リニアモータの可動子は分割された第2ステージの各々に設けられる。
(もっと読む)
制御装置及び露光装置
【課題】外乱などに起因する変動を効果的に抑えること。
【解決手段】制御装置は、制御対象を駆動する駆動部と、前記制御対象の位置を計測する位置計測部と、前記制御対象の位置と前記制御対象を駆動するための駆動制御値とが関連付けられた参照テーブルを作成するテーブル生成部と、前記参照テーブルを参照して前記位置計測部で計測された前記制御対象の位置に対応する参照値を出力する参照部と、前記参照部から出力された前記参照値を補正するための補正係数を生成する補正係数生成ユニットと、前記補正係数を用いて前記参照値を補正し補正指令値を生成する補正部と、前記補正指令値を前記駆動制御値に加算する加算部と、を備える。
(もっと読む)
清掃装置
【課題】 歯牙を最適な運動にて清掃、マッサージする機具。
【解決手段】 手指により把持する把持部に第一磁場発生手段を設け、その磁場発生手段の内部にさらに第2磁場発生手段を設け、その第二磁場発生手段の端または内部に切削、研磨、清掃、診断用などの先端子を設けることにより的確な切削、研磨、清掃が可能となる。またそれらの磁場発生手段の時間、空間変動を検出すればその位置がわかり目視不可能な位置の切削、研磨、清掃が可能となる。さらにまた、磁場や振動を組織に伝達すれば、血行循環改善となる。
(もっと読む)
二次元位置決め装置およびその回転時の磁極位置ずれ補正方法。
【課題】 回転時にモータの磁極位置とセンサの示す磁極位置のずれを正確に補正することで、θ制御に必要な推力を発生させることができ、回転時の推力不足に伴うトルク不足を解消し、静止保持することができる二次元位置決め装置を提供することを目的とする。
【解決手段】 二次元位置決め装置において、フォーサ回転時に生じる各モータの磁極位置と各センサの示す磁極位置とのずれを算出する磁極位置補正量演算器6を備え、磁極位置補正量演算器6で、磁極位置補正量δx1,δx2,δy1,δy2を算出し、磁極位置補正量を推力制御器X1,X2,Y1,Y2に入力し、補正後の磁極位置にて各モータ11〜14を駆動することを特徴とする。
(もっと読む)
1 - 20 / 41
[ Back to top ]