
Fターム[5H560AA10]の内容
無整流子電動機の制御 (40,007) | 用途 (2,430) | その他の用途 (557)
Fターム[5H560AA10]に分類される特許
1 - 20 / 557
画像形成装置
電動工具
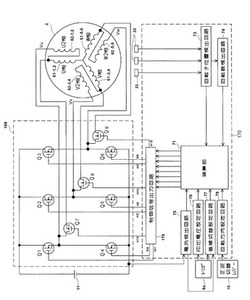
【課題】巻線仕様を変更して2種類以上のモータ特性を得るモータを備える場合に、各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行うことで、切替えた瞬間に生じる急激なトルク変化や回転数変化を回避する。
【解決手段】永久磁石回転子と、固定子4と、固定子の各ティース毎に2つのコイルを持つ巻線を有するモータと、これによって駆動される先端工具と、前記巻線へ駆動電力を供給するインバータ回路169と、これを制御する制御部170と、前記モータの起動及び回転の制御を行うためのスイッチとを備え、前記巻線は前記ティース毎に2つのコイルを有することで、2種の巻線仕様を有するものであり、制御部170は、前記モータに流れる電流に応じて2つのコイルへの通電を変化させることにより各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行う。
(もっと読む)
コンベヤ駆動装置

【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3が、低保持力の永久磁石である可変磁石を備えた可変磁束モータ3aであり、回転数に応じて可変磁石に磁化電流を供給し磁束を制御することにより、可変磁束モータ3aが所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】ドライバ回路に入力される回転センシング信号へのノイズの混入に起因するモータ回転の不安定化と、モータ起動時のギヤ歯の衝突に起因するギヤの寿命低下とを抑えつつ、搬送モータによって第1搬送ローラ16aを迅速に加速する。
【解決手段】DCブラシレスモータからなる搬送モータ210の回転量を検知するモータエンコーダ211と、ドライバ回路212とを搬送モータ210に搭載し、モータ起動時にて、搬送モータ210の回転速度を第1加速特性で加速させるように搬送モータ210を駆動しながら、モータエンコーダ211による検知結果と第1加速特性とに基づいて把握したタイミングが到来した後に、搬送モータ210の回転速度を第1加速特性よりも加速性に優れた第2加速特性で加速させるように搬送モータ210を駆動する加速度変更処理を実施するようにモータ制御回路200を構成した。
(もっと読む)
電動オイルポンプ装置
【課題】円滑に起動し、センサレス制御で確実に駆動できるブラシレスモータを備えた電動オイルポンプ装置を提供する。
【解決手段】基板19と対向するロータ6の回転面には、周縁部から中心に向かう白色の線状の検出対象物21が等角度で複数形成されている。基板19には、ロータ6と対向する面上に、発光素子と受光素子の2つの赤外線素子同士が同一方向に並んで配置された反射型フォトセンサである光センサ22が搭載されている。光センサ22の発光部から出た赤外光は、ロータ6の回転面に形成された検出対象物21に反射して光センサ22の受光部に入射する。制御部20は、光センサ22から出力された検出対象物21の検出パターンの情報に基づき、ロータ6の角度位置を演算する。
(もっと読む)
駆動装置及びそれを備えた画像形成装置
【課題】画像品質を向上させることができる駆動装置及びそれを備えた画像形成装置を提供する。
【解決手段】駆動装置は、位置・速度追従制御器130を備え、位置・速度追従制御器130は、PID制御器140と、減算器131と、PWM回路133と、ゲイン設定部134と、ゲイン設定指示部135と、を備え、ゲイン設定指示部135は、DCモータ101がホールド状態になった時刻以降において、位置偏差が予め定められた閾値以下、かつ、一定時間経過後に、ゲイン設定部134にホールド時ゲインを設定させ、スルーアップ制御が開始された場合に、ゲイン設定部134に駆動時ゲインを設定させる構成を有する。
(もっと読む)
電気掃除機
【課題】応答性の高いインバータにより吸込み圧力を制御することにより、作業性の高い掃除機を実現すること。
【解決手段】交流電源1より与えられる交流電力は直流に変換された後、インバータ回路4に入力され任意の周波数の3相交流に変換され、接続されたモータ5およびファン6を任意の回転数で駆動する。電流制御手段9は、モータ5に流れる電流を所望の電流値になるように制御する。さらに圧力制御手段10は、掃除機の吸込み圧力を検出する圧力センサ8の検出値を外部より与えられる目標圧力指示値になるようにモータ5に流れる電流値の目標値を設定することにより、モータ5に流れる電流を制御することによって、掃除機の吸込み圧力を掃除作業性に最適な圧力値に制御することができる。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
ブラシレスモータ用制御装置およびそれを備えた洗濯機
【課題】簡単、安価な構成および簡単な演算での回転位置センサの取付誤差を補正して、振動、騒音を低減できるブラシレスモータ用制御装置およびそれを備えた洗濯機を提供する。
【解決手段】ブラシレスモータ用制御装置5は、ホールセンサ55u,55v,55wの出力に基づいて、複数のホールセンサ55u,55v,55wの複数の間隔データを得ると共に、複数の間隔データの平均値を求める誤差検出部80とを備える。上記複数の間隔データおよび平均値はセンサ誤差メモリ部65に記憶される。センサ誤差補正部66は、上記間隔データおよび平均値に基づいて、ホールセンサ55u,55v,55wの間隔のズレを補正する。これにより、角速度推定部67は、ホールセンサ55u,55v,55wの間隔のズレを補正した結果を示す信号に基づいて、ブラシレスモータ4のロータの回転速度を正確に求めることができる。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
モータ電流検出装置、モータ制御装置、及び電動工具
【課題】バッテリからブラシレスモータに流れる平均電流及び瞬間電流をそれぞれ簡素な構成で適切に検出できるようにする
【解決手段】バッテリからブラシレスモータに流れる電流を検出する1つの電流検出抵抗R0と、この電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1以下の周波数帯域の電流成分(平均電流)を抽出する第1フィルタ手段42と、電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1よりも高い第2カットオフ周波数fc2以下の周波数帯域の電流成分(瞬間電流)を抽出する第2フィルタ手段43と、を備えている。このような簡素な構成ながら、高効率・高出力のブラシレスモータにおいて回路保護のために検出すべき平均電流及び瞬間電流を適切に検出することができる。
(もっと読む)
ブラシレスモータの駆動制御装置
【課題】ブラシレスモータの駆動制御装置から外部の上位制御装置に送信される回転速度情報の認識精度を維持する。
【解決手段】ブラシレスモータを外部の上位制御装置からの制御指令に基づいて駆動制御するブラシレスモータの駆動制御装置において、ブラシレスモータの回転速度情報、又はブラシレスモータ及びブラシレスモータの駆動制御装置に発生した異常の内容を表す異常情報を、PWM信号により外部の上位制御装置に送信するときに(S408)、PWM信号の周波数を、回転速度情報又は異常情報に応じて設定し(S406,S407)、PWM信号のデューティ比を、異常が発生したときと発生していないときとで異なる値D1,D3に設定する(S403,S405)。また、異常が発生した場合、ブラシレスモータが回転可能であるときには、デューティ比をさらに異なる値D2に設定して(S404)、周波数を回転速度情報に応じて設定する(S406)。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの脱調を抑制する。
【解決手段】複数の巻線を備えたブラシレスモータの各相に対するパルス電圧の通電モードを切り替えることで、ブラシレスモータを回転駆動するブラシレスモータの駆動装置は、非通電相の電圧(誘起電圧)と電圧閾値とに基づいて通電モードを順次切り替える(S36〜S40)。また、ブラシレスモータの駆動装置は、パルス電圧の印加直後に現われる誘起電圧の振れを検出しないように、PWM制御のデューティ比の下限値を設定すると共に(S33)、誘起電圧が低下しないように、通電モードの切り替えタイミングにおける誘起電圧変化と電圧閾値に基づいてデューティ比の上限値を設定する(S34)。そして、デューティ比をその上限値及び下限値で画定される範囲内に規制することで、ブラシレスモータの脱調を抑制する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの過渡状態において脱調が起こり難くする。
【解決手段】ブラシレスモータが第1の回転速度N1未満で回転駆動する低速運転領域では、非通電相の相電圧と閾値との比較結果に応じて通電モードを切り替える。ブラシレスモータが第1の回転速度N1以上かつ第2の回転速度N2以下で回転駆動する中速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立し、かつ、その状態から所定角度回転するのに要する時間が経過したとき、又は、非通電相の相電圧が所定電圧を横切った第1の条件が成立したときに、通電モードを切り替える(S362〜S368)。また、ブラシレスモータが第2の回転速度N2より速く回転駆動する高速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立したときに、通電モードを切り替える(S362、S369)。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータにおける脱調の発生を抑制する。
【解決手段】3相ブラシレスモータの2相に通電する通電モードを非通電相に誘起される誘起電圧に基づいて切り替えるブラシレスモータの駆動装置において、目標回転速度に応じたPWM信号のデューティ比である目標デューティ比Dtが誘起電圧を検出可能なデューティ比の下限である検出限界値Dlim未満となった場合に、PWM信号の周期に応じて誘起電圧を検出するための検出タイミング(1/N)を設定し(S349)、検出タイミングにおけるPWM信号のデューティ比である検出時デューティ比D1をDlimに制限する(S350)。また、連続する検出タイミング間において、Dlimに制限された検出時デューティ比D1と、誘起電圧を検出しないときの非検出時デューティ比D2〜DNと、を加算平均した平均デューティ比がDtに近づくようにD2〜DNを設定する(S351)。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
モータ制御装置
【課題】回転センサに故障が生じたときでも、モータの駆動を継続することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2の出力を用いて、モータ1が駆動される。レゾルバ2の故障時には、位置推定部60が演算する推定回転位置を用いて、センサレス制御によって、モータ1が駆動される。また、センサレス制御が行われる場合において、低速域用位置推定部61によってロータ回転位置の推定が行われる低速域では、目標電流上限値が、一定以上のロータ位置推定精度が得られる値に制限される。
(もっと読む)
電気洗濯機
【課題】脱水性能確保と、過大パワーの防止による保護を実現すること。
【解決手段】衣類を収納するドラム21を回転駆動する電動機26、電動機26に交流電力を供給するインバータ回路35を有し、電動機入力電圧可変手段42、電動機入力電流検知手段43、位置検知手段34を有し、脱水時に電動機26の出力トルクを所定値に制限する第1の速度範囲よりも高速側に、電動機入力パワーを略一定に制限する第2の速度範囲を有することにより、第1の速度範囲での過大トルクの防止と、第2の速度範囲での電動機の入力パワーの制限が可能となり、良好な脱水性能が確保と共に、信頼性の高い装置の実現、また電源系統に対する負担低減を行うことができる。
(もっと読む)
1 - 20 / 557
[ Back to top ]