
Fターム[5H560DC06]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | 回転方向検出 (48)
Fターム[5H560DC06]に分類される特許
1 - 20 / 48
ブラシレスモータの駆動制御装置およびハンチング防止方法
【課題】ハンチングを未然に防止する。
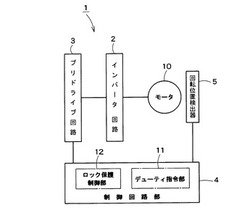
【解決手段】ステータに設けられた複数相の電機子コイルに流す電流を制御することにより、ロータを回転させるブラシレスモータの駆動制御装置1は、複数相の電機子コイルに対して通電を行なうインバータ回路2と、インバータ回路2を駆動するための駆動信号を生成するプリドライブ回路3と、単位時間ごとにロータの回転位置を検出するとともに、検出された回転位置に同期して単位時間ごとにパルス列が変化する複数のパルス信号を生成する回転位置検出器5と、ロータの回転方向が逆回転方向から正回転方向に変化する際に、プリドライブ回路3に対して駆動信号のオンデューティ比を増大させるデューティ指令部11と、を備える。
(もっと読む)
ブラシレスDCモータの回転子位置検出方法とその装置

【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、並びにブラシレスファンモータの駆動装置及び制御方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
直流ブラシレスモータの回転方向同定方法及び同定装置
【課題】結線管理を不要にして誤結線を解消可能とした直流ブラシレスモータの回転方向同定方法及び同定装置を提供する。
【解決手段】駆動装置から電圧が印加されるステータコイルと、永久磁石を有するロータと、を供えた多相直流ブラシレスモータの回転方向同定方法及び同定装置において、ロータを外部から一方向に回転させたときにステータコイルに発生する逆起電力の順序を駆動装置10内のCPU11が検出し、そのときのロータの回転方向を、CPU11が正転方向として同定する
(もっと読む)
モータ駆動制御装置
【課題】モータを起動させる際、風等の影響を受けてモータが正方向または逆方向のどちらかに回転している状態にあっても、モータを確実に起動させることができるモータ駆動制御装置の提供。
【解決手段】回転方向検知部2は、モータ51起動直前の回転方向を検知する。駆動電圧調整部5は、回転方向検知部2により検知されたモータ51起動直前における回転方向に応じて、モータ51起動時の駆動電圧SU1,SV1,SW1が、モータ51が無回転の状態で起動する場合にモータ51に出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整部5は、モータの起動直前の回転方向に応じて、モータ51の回転数を制御するための制御パラメータを、モータ51が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
(もっと読む)
モータ駆動回路
【課題】モータを迅速に起動すること。
【解決手段】モータの正方向又は逆方向の回転を指示する回転方向指示信号に応じて、モータを正方向又は逆方向に回転させるための駆動信号を出力する駆動回路1と、モータの回転数が基準回転数よりも高いか否かを比較する回転数比較回路4と、回転方向指示信号が変化すると回転数比較回路4の比較結果に基づいて制動を制御するショートブレーキ制御回路2と、回転方向を変更する通電相順序切替制御回路3と、モータが停止しているときに回転方向指示信号が変化すると、回転数比較回路4の比較結果に関わらず、モータの制動動作が行われずにモータの回転方向が変更されるように駆動回路1を制御する為の判断回路110と、を備える。
(もっと読む)
モータ制御装置及びバルブタイミング調整装置並びにインバータ回路の通電制御方法
【課題】モータの実回転方向が回転方向指令と逆になった場合に、フリーホイールダイオードにおいて発生する損失を軽減できるモータ制御装置を提供する。
【解決手段】制御回路60は、外部より指令として与えられるモータ4の目標回転方向Dtと、回転角センサSU,SV,SWが出力するセンサ信号に基づき信号生成ブロック72により検出されるモータ4の実回転方向Drとが相違する方向不一致状態を検出すると、120度通電方式から180度通電方式に切り替えてインバータ部76を構成する上段スイッチング素子FU,FV,FWのオン期間を進み位相側に拡げるように制御し、還流電流を上段スイッチング素子FU,FV,FWを介して流す。
(もっと読む)
モータ駆動装置
【課題】磁極位置信号に関する初期設定を自動で設定できるモータ駆動装置を提供する。
【解決手段】トルク指令生成器1と、磁極位置設定器2と、検出方向設定器としてのCS信号方向設定器3と、検出方向切替器4と、電流制御器5とを備えている。本モータ駆動装置が、同期モータ30を回転駆動するように駆動制御することによりモータ30の回転子が回転する。また、モータ30には磁極センサ31が取り付けられている。磁極センサ31は、モータ30の回転動作に応じて、回転子の磁極の位置に応じた磁極位置信号を本モータ駆動装置へと出力する。
(もっと読む)
単相交流同期モータおよびその制御方法
【課題】特許文献1のような特殊なモータをさらに改良し、モータの利用効率または稼働率を上げること。
【解決手段】制御部19は、ロック停止、回転速度の過不足または逆転の少なくとも1つまたは複数を検出可能とされ、制御部19のカウンタ41は、その検出回数をカウントし、カウント数が所定の複数回以下のときは、起動運転を再開し、所定の複数回を超えるときは運転を停止する制御を行う単相交流同期モータ1を構成する。
(もっと読む)
モータ駆動装置
【課題】同期電動機の相順と位置検出器の検出方向を自動設定できるモータ駆動装置を提供する。
【解決手段】位置検出器が取り付けられた同期電動機を制御するモータ駆動装置において、位置検出器からの位置検出信号16を検出方向切替信号15により方向を切替えて位置情報17として出力する検出方向切替器4と、起動信号11によりトルク指令12を出力するトルク指令生成器1と、起動信号11により磁極位置指令13を出力する磁極位置設定器2と、トルク指令12と磁極位置指令13によりUVW指令電圧14を出力する電流制御器5と、位置情報17と磁極位置指令13から検出方向切替信号15を出力する位置検出方向設定器3を備え、位置検出方向設定器3において、磁極位置指令13と位置情報17の変化により検出方向切替信号15を設定する。
(もっと読む)
ブラシレスモータの駆動装置及びブラシレスモータを適用した電動車両
【課題】ブラシレスモータのセンサレス駆動方式において、始動前における回転状態を検知して適切な始動方式を決定し、逆回転状態を検知した場合の的確な逆転制動制御を実現し、逆回転状態から制動停止状態を検出してスムーズな正回転加速に引き継ぐ手段を提供する。
【解決手段】直接転流タイミングを与える位置における逆起電圧を検出して転流制御する手法をもとに、始動前のロータの回転状態を検出してそれぞれ最適の始動方式を決定すると共に、逆回転の低速時の逆起電圧を有意に増幅してロータの逆転制動から停止に至るロータ位置の測定感度を上げる手段によって、逆回転から制動、停止、さらに正回転にいたる連続した転流制御を実現する。
(もっと読む)
永久磁石同期モータの制御装置
【課題】リニア形、回転形を問わず適用可能であり、摩擦等の外乱があっても初期磁極位置を高精度かつ少ない演算量で推定できるようにした制御装置を提供する。
【解決手段】位相角指令演算手段7は、電源投入時に、所定の電流指令値に基づき電流制御を行ってモータ3を励磁する励磁モードでは位相角指令値を一定値(例えばゼロ)とする機能と、その後の動作モードではモータ3の停止状態から位相角指令値を前記一定値からランプ関数的に増加させる機能と、モータ3の移動方向が想定方向と逆である場合に位相角指令値を180度反転させる保護機能と、モータ3の移動速度が制限値以上になった場合に位相角指令値の増加割合を低減させる速度制限機能とを有し、所定の時間または角度量に達するまで位相角指令値を変化させてモータ3の磁極位置を印加電圧の位置に一致させる。
(もっと読む)
モータ制御駆動装置及びモータ始動位置決め方法
【課題】回転角度検出手段からの出力に基づくロータ角度値が負の値を示すことなく、かつロータがデッドポイントに位置していたとしても正常に始動位置決めを完了することが出来るものを提供する。
【解決手段】モータ制御駆動装置のモータ制御手段が、始動時に、回転角度検出手段から初期ロータ角度値を取得すると、ロータが第1の角度になるように永久磁石同期モータを制御し、永久磁石同期モータのロータの回転が停止すると、回転角度検出手段から正の値であるロータの第1のロータ角度値を取得し、その後に、ロータが第2の角度になるように永久磁石同期モータを制御し、永久磁石同期モータのロータの回転が停止すると、ロータの回転に応じて取得したロータ回転角度値を第1のロータ角度値に加算することによって第2のロータ角度値を算出し、第2のロータ角度値をロータの始動基準角度値とする。
(もっと読む)
誘起電圧検出回路とそれを有するモータ駆動用半導体装置及びモータ並びに空調機
【課題】本発明の目的は、誘起電圧検出回路に発生する消費電力を低減し低コストを図ると共に、制御用半導体装置のA/Dポートを使用する必要がないことは勿論、低い回転速度まで誘起電圧が検出可能で、且つ、ノイズに強い誘起電圧検出回路とそれを有するモータ駆動用半導体装置を提供することにある。
【解決手段】本発明の誘起電圧検出回路は、上記目的を達成するために、モータのコイルに発生する誘起電圧を検出し、入力電圧をH/Lの信号に変換して出力することを特徴とする。また、本発明のモータ駆動用半導体装置は、上記の誘起電圧検出回路と、モータをインバータ駆動するためのスイッチング素子と前記スイッチング素子を駆動する駆動回路とを備えていることを特徴とする。
(もっと読む)
可変動弁機構の制御装置
【課題】ブラシレスモータをアクチュエータとして用いる可変動弁機構の制御系で用いるセンサ数を削減する。
【解決手段】ブレシレスモータの出力軸の回転に同期するパルス信号を発生する回転角センサを備え、前記パルス信号に基づいて前記出力軸の回転角を検出すると共に、検出された回転角に基づいてブラシレスモータの磁極位置を検出し、検出した回転角及び磁極位置に基づいてブラシレスモータを制御する
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTがフィードバックされ、検出操舵トルクTを指示操舵トルクT*に近づけるように、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。加算角αは、加算角リミッタ24による制限を受ける。検出操舵トルクTが飽和状態となると、初期化部29により、加算角α等の初期化が行われる。検出操舵トルクTの飽和に応答して初期化が行われたときは、検出操舵トルクTの絶対値が所定のしきい値以下となるまで、初期化処理が禁止される。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差である負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。角速度演算部27は、三相検出電流IUVWのゼロクロス点間の間隔に基づいて、回転角速度ωを求める。補正部28は、指示操舵トルクT*の変化に応じて回転角速度ωに補正を施す。角速度適応制御部29は、回転角速度ωに基づき、PI制御部33のゲインを変更する。
(もっと読む)
モータ制御装置
【課題】低速域用位置検出と高速域用位置検出との切換えを適切に行うことにより、正確なロータ位置の推定を可能とし、モータを効率的に制御できるようにする。
【解決手段】位置推定部21は、電動モータ3の回転位置を求める。位置推定部21は、低速域用位置推定部41と、高速域用位置推定部42と、切換判定部43と、切換部44とを備えている。低速域用位置推定部41は、電動モータ3が低速域で回転しているときに低速推定回転位置θ^Lを生成する。高速域用位置推定部42は、電動モータ3が高速域で回転しているときに高速推定回転位置θ^Hを生成する。切換部44は、低速推定回転位置θ^Lおよび高速推定回転位置θ^Hのいずれかを選択し、推定回転位置θ^として出力する。切換判定部43は、低速域と高速域との重複領域である切換速度領域において、回転速度ωと回転加速度αとの符号の異同に応じて、切換部44に切換えを指令する。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】切換制御部40は、モータ3の回転角速度ωに応じて第1モードと第2モードとの間で制御モードを切り換える。第1モードでは、仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。第2モードでは、検出操舵トルクTに応じて二相指示電流値Idq*が設定されるとともに、誘起電圧推定部27などの働きによってロータの回転角が推定される。この推定により求められた推定回転角θEを用いてモータ3の制御が行われる。
(もっと読む)
位置検知器を有しないブラシレス直流モータの起動駆動方法およびこれを用いた電動自転車
【課題】 従来のブラシレスモータの回転子位置検出方法では、測定に時間がかかるため測定時間中に回転子位置が変動する場合には使用できなかった。たとえば電動自転車では、停止していても坂道などで回転子が変動して位置検出の誤差から誤動作につながる危険があり実際の応用には不可能であった。回転子が少々変動しても位置検出が正確におこなわれる手段が求められる。
【解決手段】 通常、回転子位置測定は三相巻線に対し6種類の通電モードで電流測定しておこなうが、6種類の通電モードのなかの有意でなく不要な測定を選択的荷省略するフローを開発することにより、実質2回から3回の測定で位置検出をおこなうことを可能にした。
(もっと読む)
1 - 20 / 48
[ Back to top ]