
Fターム[5H560XA08]の内容
無整流子電動機の制御 (40,007) | 制御方式 (6,312) | 複数の制御系の選択使用 (101)
Fターム[5H560XA08]に分類される特許
1 - 20 / 101
モータ制御装置
インバータ制御装置と電動圧縮機および電気機器
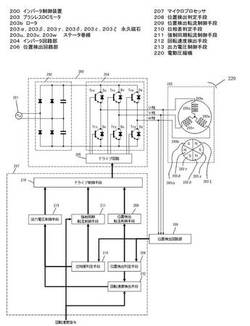
【課題】誘起電圧波形のゼロクロス点の検出が不可能、すなわちロータの相対位置が認識できないような運転状態となった場合に、ブラシレスDCモータの運転を継続することが不可能となって脱調停止するという課題を有していた。
【解決手段】ブラシレスDCモータ203の目標回転数に応じて、所定の周波数で通電角180度未満の波形を出力する同期転流により動作するとともに、インバータ回路部204の出力電圧に対するロータ誘起電圧位相を所定の位相に保つために、同期転流による動作においてもロータ位相の変化状態に応じて出力電圧を変化させ、過負荷時にオーバーラップ通電をする際、位相の変化に対して脱調しにくい低回転時よりオーバーラップさせることにより、モータの運転状態を追従させるようにした。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器

【課題】PWM信号のデューティ値が小さくPWM信号がオンとなる時間が短い場合、強制的に転流を継続する強制同期転流によってモータの運転状態を維持し、インバータ出力電圧に対する誘起電圧位相の状態に応じてインバータ出力電圧を変化させることで、強制同期転流時の安定したモータ動作を実現すること。
【解決手段】出力電圧に対するロータ誘起電圧位相を所定の位相に保つ位相差判定手段210と、ブラシレスDCモータの目標回転数に応じて所定の周波数で予め設定した転流波形を出力する強制同期転流制御手段211を備え、PWM制御デューティ値が所定の値より小さくなった場合、強制同期転流により動作するとともにロータ位相の変化状態に応じて出力電圧を変化させるので安定したモータ動作を実現することができる。
(もっと読む)
モータ駆動装置及びモータの駆動制御方法
【課題】安価な回路構成で一般的な制御方法による起動を行うとともに、エラー発生時には適切なリカバリー動作を実現する。
【解決手段】モータの駆動開始時には、第1の駆動手段によってモータを駆動した後、第2の駆動手段によってモータを駆動するように、第1の駆動手段と第2の駆動手段とを切り替える制御手段と、を有し、第1の駆動手段は、所定の駆動周波数でオープンループ制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の駆動周波数よりも低い駆動周波数でモータを駆動し、第2の駆動手段は、所定の加速度でフィードバック制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の加速度よりも低い加速度でモータを駆動する。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
ブラシレスモータの駆動装置
【課題】パルス誘起電圧に基づく通電モードの切り替えタイミングの判定をより安定して行え、脱調の発生を未然に抑制できるブラシレスモータの駆動装置を提供する。
【解決手段】3相ブラシレスモータの3相のうちの非通電相に、パルス印加電圧によって誘起されるパルス誘起電圧と閾値とを比較して、通電モードの切り替えタイミングを判定するセンサレス制御を行う。ここで、パルス印加電圧のデューティ制御におけるデューティ比を、パルス誘起電圧の振れ時間,A/D変換時間,電圧検出回路の分解能などに基づき設定した下限値以上に制御する。これによって、パルス誘起電圧の振れ時間内でパルス誘起電圧をサンプリングしたり、A/D変換中にパルス電圧の印加が停止されてしまうことを抑制でき、パルス誘起電圧の検出精度が向上して、脱調の発生を抑制できる。
(もっと読む)
モータ駆動装置
【課題】モータ駆動用の電源に異常が起きた場合であっても、モータを良好に駆動し続けることが可能なモータ駆動装置を実現する。
【解決手段】モータ駆動装置において、モータのコアに第1巻線と第2巻線とが巻回され、第1巻線及び第2巻線のうち、第1巻線のみに電流が流れるように第1巻線と接続している第1電源と、第1巻線及び第2巻線のうち、第2巻線のみに電流が流れるように第2巻線と接続している第2電源と、第1電源及び第2電源のうち、モータを駆動するために使用する電源を選択する選択部と、を有する。選択部は、第1電源が正常であるときには、第1電源からの電流が第1巻線に流れるように、第1電源が異常であるときには、第2電源からの電流が第2巻線に流れるように、モータを駆動するために使用する電源を選択する。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
モータ制御装置,空気調和機
【課題】相電圧検出回路を備えたモータ制御装置において、通常制御時の相電圧検出回路の損失があった。そこで、インバータの直流電圧の変化やさまざまな仕様のモータに対応でき、記憶容量の小さい高効率なモータ制御装置を提供する。
【解決手段】上述した課題を解決するため、変調率に応じて相電圧検出回路の損失とインバータのスイッチング損失の低い変調方式を選択して制御する。また変調率が小のとき、下120°固定2相変調を行い、変調率が大のとき上下60°固定2相変調を行う。また回転数が小のとき、3相変調を行い、回転数が大のときでかつ変調率が小のとき、下120°固定2相変調を行い、回転数が大のときでかつ変調率が大のとき上下60°固定2相変調を行う。
(もっと読む)
インバータ制御装置、それを用いた電動圧縮機および家庭用電気機器
【課題】インバータ制御装置において、120度以上に通電角を広げる広角制御や、ブラシレスDCモータのステータに誘起される誘起電圧の位相に対して電圧位相を進める進角制御を行なうとき、無通電角が電気角30度は生じ、インバータが望みの電圧を十分に出力することができず、インバータの直流電圧利用率が若干落ちることにより、ブラシレスDCモータの端子電圧も若干小さくなり、運転範囲に対して望む値に対して若干狭くなるという課題を有していた。
【解決手段】ブラシレスDCモータの機械角1周期中に少なくとも1回は位置検出手段208により検出した誘起電圧のゼロクロス点を使用せずに、過去に取得した検出値から演算した演算値から通電角を誘起電圧のゼロクロス点よりも前に転流する制御を行うことで、無通電角を電気角30度未満で抑えられ、より広い運転範囲の制御を可能とする。
(もっと読む)
モータ駆動制御装置
【課題】モータを起動させる際、風等の影響を受けてモータが正方向または逆方向のどちらかに回転している状態にあっても、モータを確実に起動させることができるモータ駆動制御装置の提供。
【解決手段】回転方向検知部2は、モータ51起動直前の回転方向を検知する。駆動電圧調整部5は、回転方向検知部2により検知されたモータ51起動直前における回転方向に応じて、モータ51起動時の駆動電圧SU1,SV1,SW1が、モータ51が無回転の状態で起動する場合にモータ51に出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整部5は、モータの起動直前の回転方向に応じて、モータ51の回転数を制御するための制御パラメータを、モータ51が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器
【課題】誘起電圧波形のゼロクロス点の検出が不可能、すなわちロータの相対位置が認識できないような運転状態となった場合、モータの運転状態を維持するとともに、強制転流による同期運転時のより安定したモータ動作を実現する信頼性の高いインバータ制御装置を提供するものである。
【解決手段】ブラシレスDCモータ203の目標回転数に応じて所定の周波数で通電角180度未満の波形を出力する同期転流により動作するとともに、インバータ回路部204の出力電圧に対するロータ誘起電圧位相を所定の位相に保つために、同期転流による動作においても、ロータ位相の変化状態に応じて出力電圧を変化させ、モータの運転状態を追従させるようにしたものであり、強制転流による同期運転時のより安定したモータ動作を実現することができる。
(もっと読む)
モータ制御装置、これを用いた圧縮機駆動装置及びこれを用いた冷凍機器
【課題】位置フィードバック運転モード中に必要トルクが急激かつ大きく変化した場合に発生する速度変動を抑制し、必要トルクの変化に対して一様な安定性を持つ制御構成を提供することを目的とする。
【解決手段】モータのトルクに係る電気量を演算する演算手段と、電流指令値を入力とする電流制御器と、前記電流制御器の出力を入力とする電圧指令値作成器と、前記電圧指令値作成器の出力に従って永久磁石モータに電圧を印加する電力変換回路とを備えたモータ制御装置において、位置フィードバック運転モード中にモータのトルクが変化あるいは安定するタイミングをトリガとし、そのトリガに合わせて、変化後のトルクに比例する値を基に、前記演算手段と前記電流制御器のうち少なくとも1つに係る電気量を設定する。
(もっと読む)
変速機のオイル供給装置
【課題】検出油温と電動オイルポンプの近傍の油温とが乖離している場合であっても、確実に且つ速やかに電動オイルポンプからの吐出圧を得ることができるようにした、変速機のオイル供給装置を提供する。
【解決手段】電動モータ81と、電動モータによって駆動され、吐出したオイル51を変速機3に供給するオイルポンプ82と、オイル温度を検出する油温センサ72と、油温センサ72により検出されたオイル温度に応じた駆動トルクを出力するように電動モータを制御すると共に、電動モータの始動時に検出温度とオイルポンプの近傍のオイル温度とが乖離している可能性があると判断したら、検出温度に応じた駆動トルクを出力するように電動モータを制御する前に、検出温度に応じた駆動トルクで回転する場合の回転数よりも低い回転数で回転するように電動モータを回転数制御する制御装置90とをそなえる。
(もっと読む)
電動パワーステアリング装置
【課題】構成簡素且つ信頼性の高い異常判定を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】ECU11は、モータ制御信号出力手段として、同一の電流フィードバック演算を実行する独立した二つのマイコン21a,21bを備える。また、各駆動回路22u,22v,22wを構成する二列のスイッチングアームSA1,SA2は、それぞれ、上記各マイコン21a,21bの何れかと関連付けられるとともに、その関連付けられた各マイコン21a,21bの出力するモータ制御信号Smcu,Smcv,Smcwのみに基づいて、独立に作動する。そして、各マイコン21a,21bは、その電流フィードバック演算における過大な電流偏差の発生を監視することにより、システムの異常判定を実行する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】モータ(巻線)のばらつきや温度環境などに因る通電モードの切り替えタイミングのずれを抑制でき、以って、効率の低下や脱調の発生を抑制できるブラシレスモータの駆動装置を提供する。
【解決手段】非通電相(開放相)の電圧と電圧閾値とに基づいて通電モードを順次切り替えるブラシレスモータの駆動装置において、1つの通電モードを継続させることで、ブラシレスモータを通電モードの切り替えを行う角度位置に位置決めし、その後に次の通電モードへの切り替えを行い、該通電モードの切り替え直後における非通電相の電圧を検出する。そして、検出した非通電相の電圧を、更に次の通電モードへの切り替えるときの判断に用いる電圧閾値として学習する。
(もっと読む)
制御装置
【課題】専用のモニタ信号端子を設けること無く、自由度の高い様々なモニタ信号を出力可能な制御装置を提供する。
【解決手段】通信線Sを介して送信される信号に基づいて制御対象を制御する制御装置20であって、所定の信号入力を検知すると前記制御対象を制御する制御モードから検査モードに移行するモード切替部20aと、前記モード切替部により前記検査モードに移行すると、前記通信線を介して送信または受信する信号の信号形態を、前記制御モードで用いる第1信号形態から第1信号形態とは異なる第2信号形態に変更して通信を行なう通信部20bと、を備えている。
(もっと読む)
単相交流同期モータ
【課題】整流波の平滑を不要とし、かつ、起動運転から同期運転への切換を安定して行うことが可能な単相交流同期モータを提供する。
【解決手段】本発明に係る単相交流同期モータは、位置センサ8の検出信号に基づいて整流電流を単相コイルL1の両方向に交互に流してモータを起動運転し、永久磁石ロータが第1の所定回転数に到達するまで回転数を上げるセンサ起動期間を有する起動運転回路1aと、永久磁石ロータの回転数が同期回転数を越えずに同期回転数付近の第2の所定回転数に到達し、位置センサ8の検出信号の立ち上がりまたは立ち下がりと交流電流のゼロクロス点とが略一致したタイミングで同期運転へ移行するように制御する制御手段5を備えている。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】応答性に優れた速度制御を行うモータ制御装置およびモータ制御方法を提供する。
【解決手段】モータ制御装置は、モータ10のロータ12の回転位置を検出する位置センサ107と、モータ10の現在の回転数と設定値との差分値を算出する比較回路102と、位置センサ107の出力から得られるパルスを進相した駆動パルスを生成するための進角を設定する進角設定回路104と、を有し、進角設定回路104は、差分値が第1閾値Th1よりも大きい場合には、差分値が第1閾値Th1以下の場合よりも高いトルクを与える進角を設定する進角を設定する。
(もっと読む)
1 - 20 / 101
[ Back to top ]