
Fターム[5H572DD10]の内容
Fターム[5H572DD10]に分類される特許
1 - 20 / 22
巻線型誘導機
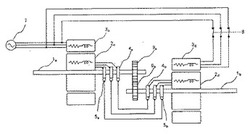
【課題】 従来の巻線型誘導機は負荷の変動及び電源電圧の変動によって回転速度が変化してしまう。このため従来の誘導機は回転数一定または電源周波数と同期させて使いたい機器には不向きであるという問題点があった。
【解決手段】 巻線型誘導機ユニット2台の回転軸を共通にするか又は回転軸の回転比が一定になるように機械的に連結し、前記誘導機ユニット2台の回転子巻線を電気的に結合することにより、前記誘導機ユニット2台のうち1台は電動機として動作、もう1台の誘導機ユニットは発電機として動作し、前記回転比と前記誘導機ユニット2台の極数で決定される前記誘導機ユニット2台のすべり周波数が一致する速度で回転速度が固定されることを特徴とする巻線型誘導機である
(もっと読む)
機械を駆動するサーボシステムの消費電力計算機能を有するサーボシステム選定装置

【課題】機械を駆動する複数のモータを駆動するモータ駆動装置を備えたサーボシステムの消費電力計算機能を有するサーボシステム選定装置を提供。
【解決手段】機械に使用されるモータと駆動アンプを備えたサーボシステムの選定を行うサーボシステム選定装置において、機械情報10、機械運転情報12、および選定対象となる少なくとも1つのサーボシステムのサーボシステム情報14を入力する入力部16と、入力部16に入力された機械運転情報12に基づいてサーボシステムの消費電力を機械情報10およびサーボシステム情報14を用いて、入力部16に入力されたサーボシステム毎に全消費電力量、全損失、あるいは電力効率の少なくとも一つを計算する演算部18と、演算部18により計算した全消費電力量、全損失、あるいは電力効率の少なくとも一つを入力部16に入力されたサーボシステム毎に表示または出力する第1の出力部20と、を備えた。
(もっと読む)
位置決め制御装置および工作機械
【課題】位置決め制御装置においてスループットを低下させずにモータの発熱を抑える。
【解決手段】位置決め制御装置は、第1の被駆動部材を移動させる第1のモータ54と、第2の被駆動部材を移動させる第2のモータ64と、第1および第2のモータのそれぞれに対して2自由度制御を行い、第1の被駆動部材を第1の目標位置に移動させ、第2の被駆動部材を第2の目標位置に移動させる制御手段51,53,61,63とを有する。制御手段は、第1の被駆動部材を第1の目標位置に移動させるために第1のモータの動作に必要な第1の時間Txと、第2の被駆動部材を第2の目標位置に移動させるために第2のモータの動作に必要な第2の時間Tyとを求め、第1および第2の被駆動部材をそれぞれ第1および第2の目標位置に移動させる際に、第1および第2のモータを、第1および第2の時間のうち長い方の時間で同時に動作させる。
(もっと読む)
駆動装置及び駆動方法
【課題】 大きな負荷がかかる起動時には、低回転域でも大きな回転力が得られる流体モータを使用して楽に起動させると共に電動モータの焼損を回避させ、起動後は電動モータにより安定して通常運転させ、よって、電動モータの起動時に必要であったスターデルタやリアクトル抵抗器等の付帯設備を不要又は小さくしてコストの低減、制御盤のコンパクト化、マグネットスイッチの接点寿命の長期化、電源設備容量の低下によるランニングコストの低減等を図ることができる駆動技術の提供。
【解決手段】 ジョークラッシャー1の駆動軸50に連結された電動モータM1及び流体モータM2と、起動時は流体モータにより駆動軸を駆動させ、この駆動軸が設定回転数に上昇したのを検出すると、流体モータから電動モータに切り替えて駆動軸を駆動させるように制御する制御装置51と、を備えている。
(もっと読む)
テーブルの制御方法およびその装置
【課題】ガントリータイプのテーブルにおいて、塗布速度への立ち上げが指令速度に対して遅れるために有効な塗布面を得るには塗布速度の高速化や除外距離(塗布を始めてから塗布膜厚の変動率が要求仕様に収まるまでの走行距離)の短縮も望まれており、速度制御への要求内容は厳しいものとなっているため、これに対応する。
【解決手段】クロスカップリング制御とゲイン切替制御の方式において、塗布速度到達時のオーバーシュートをおさえ、それ以降は速度ムラをおさえるために、中心速度コントローラのゲイン切替のみを行っていたが、左右偏差コントロールのゲインを加速時に大きくして加速終了後に小さくした。
(もっと読む)
可動テーブルの制御装置およびそれを備えた可動テーブル装置
【課題】 ケーブル重量を考慮してアクチュエータに推力を分配することで、位置決め精度を高め、整定時間を短縮し、高性能な制御が可能な可動テーブル制御装置を提供する。
【解決手段】 固定部との間に電力線などのケーブルによって接続された可動テーブル107を駆動するアクチュエータ105及び106と、該アクチュエータの発生する推力を制御するアクチュエータ推力制御器103及び104と、可動テーブル107の位置指令から重心まわり推力指令を算出する制御器101と、重心まわり推力指令をアクチュエータ推力指令に変換する推力指令変換器10とを備えた可動テーブル制御装置において、推力指令変換器10が可動テーブル107のみの重心位置をケーブル込み重心位置に換算する重心位置変換器12と、可動テーブル107の位置指令値またはフィードバック値を用いてケーブルのテンションを算出するケーブルテンション算出器13と、を備える。
(もっと読む)
モータ制御方法
【課題】通常の2レベルインバータを用いても、矩形波電圧による複合電流の制御を可能とし、電圧利用率を向上させ、モータの出力を増加させることができるモータ制御方法を提供する。
【解決手段】少なくとも1つの回転子を備え、少なくとも2つの周波数成分の交流電流を重畳して駆動する交流モータの制御方法において、交流電流のいずれかの周波数の電気角1周期内に、複数の矩形波相電圧パルスを生成し、複数の矩形波相電圧パルスの位相と幅とを操作し、前記電気角周波数成分の交流電流と、その複数次数の周波数成分の交流電流とを制御する。
(もっと読む)
アクチュエータおよび搬送装置
【課題】薄シートの搬送において精度の高い的確な動作を得ることができ、複数の動作方向を備えて薄シートの搬送方向を簡単に多方向へ変更することができるアクチュエータおよび薄シート搬送装置を提供する。
【解決手段】ベース面上における三角形の各頂点をなす位置のそれぞれに配置し、少なくともベース面の垂線方向に沿った方向成分を含んで振動する3つの振動子と、3つの振動子で三点支持して配置し、作用点が搬送対象物に当接する駆動体と、各振動子をそれぞれ選択的に駆動する駆動制御手段を備え、各振動子における駆動体の支点および駆動体の作用点が三角錐の各頂点をなす位置にそれぞれ対応し、かつ各振動子における駆動体の支点を結ぶ形状が正三角形をなし、各振動子の選択的な駆動により作用点が所定の運動方位に沿って円運動もしくは楕円運動する。
(もっと読む)
アクチュエータの駆動制御方法およびアクチュエータによる搬送制御方法
【課題】薄シートの搬送において精度の高い的確な動作を得ることができ、複数の動作方向を備えて薄シートの搬送方向を簡単に多方向へ変更することができるアクチュエータの駆動制御方法を提供する。
【解決手段】ベース面上に配置した3つのボイスコイルモータ3の各コイルボビン4で駆動体14を三点支持してなり、各コイルボビン4における駆動体14の支点16、17、18および駆動体14の作用点15が三角錐の各頂点をなす位置にそれぞれ対応し、かつ各コイルボビン4における駆動体14の支点16、17、18を結ぶ形状が正三角形をなし、駆動体14の作用点15が搬送対象物に当接し、各ボイスコイルモータ3のコイルボビン4が少なくともベース面の垂線方向に沿った方向成分を含んで振動するアクチュエータにおいて、各ボイスコイルモータ3に印加する電流パルスを制御して各コイルボビン4をそれぞれ選択的に駆動することにより、駆動体14の作用点15を所定の運動方位に沿って運動させる。
(もっと読む)
電動機の制御装置
【課題】損失や温度等の作動状態の違いを考慮して各電動機の作動条件を変更し、これにより複数の電動機における総損失を減少させることができる電動機の制御装置を提供する。
【解決手段】第1電動機1a,第2電動機1bを駆動する際に生じる損失の推定値を算出する第1電動機作動状態算出部161,第2電動機作動状態算出部162と、損失の推定値が最大となる電動機に対して、DC/DCコンバータ151によりインバータ62a,62bに供給される直流電力の電圧を変更する供給電圧変更処理を実行して、該電動機の端子間電圧の合成ベクトルである相電圧とDC/DCコンバータ151の出力電圧に応じて設定される目標電圧との差を減少させる直流電圧制御部160とを備える。
(もっと読む)
モータ駆動集積回路
【課題】モータを安定駆動し、回路の面積及びコストを削減する。
【解決手段】モータ駆動集積回路は、直列に接続された第1及び第2トランジスタと、直列に接続された第3及び第4トランジスタと、直列に接続された第5及び第6トランジスタと、一端が前記第3及び第4トランジスタの接続点と接続された第7トランジスタと、第1及び第2トランジスタの接続点に第1コイルの一端を接続するための第1コイル接続端子と、第3及び第4トランジスタの接続点に第1コイルの他端を接続するとともに、第3及び第7トランジスタの接続点に第2コイルの一端を接続するための第2コイル接続端子と、第5及び第6トランジスタの接続点に第2コイルの他端を接続するための第3コイル接続端子と、第1コイルに流れる電流を検出するための抵抗を接続するための電流検出抵抗接続端子とを備える。
(もっと読む)
スイッチト・リラクタンス・モータ
【課題】2つのモータを駆動するシステムにおいて、スイッチング素子やダイオードの高耐圧化や電源電圧の高圧化によるコスト高を解消することができるスイッチト・リラクタンス・モータの駆動回路を提供する。
【解決手段】第1のスイッチト・リラクタンス・モータ4と、第1のスイッチト・リラクタンス・モータを駆動する第1の駆動回路2と、第1のスイッチト・リラクタンス・モータ4と異なる相数で駆動する第2のスイッチト・リラクタンス・モータ5と、第2のスイッチト・リラクタンス・モータを駆動する第2の駆動回路2と、から構成されるスイッチト・リラクタンス・モータの駆動回路において、第1の駆動回路と第2の駆動回路の各々一相(4u、5a)を同一の駆動回路で構成する。
(もっと読む)
インバータ
【課題】発生させる複合電流がm相とn相と異なっていても、リプル電流の低減効果を最大にすることができるインバータを提供する。
【解決手段】回転電機に、その2つのロータを各々独立に駆動するための複合電流を供給するためのインバータであって、複合電流がm相とn相からなり、m相電流のうち少なくとも2つの電流の相対位相が180°で、n相電流のうち少なくとも2つの電流の相対位相が0°であるとき、PWM駆動パルス信号を得るために用いる、互いに所定の位相差を持つ三角波を出力可能な、独立に設けられた三角波発生手段18を備え、2つのロータに発生するリプル電流が最小となるよう位相差を制御するよう構成する。
(もっと読む)
リニアモータ、レンズ駆動装置及びデジタルカメラ
【課題】 簡易な構成でコイル体の駆動制御が容易にでき且つ騒音を低減できるリニアモータ、レンズ駆動装置及びデジタルカメラを提供する。
【解決手段】 本発明のリニアモータ7は、ヨーク17と、マグネット19と、コイル体23と、駆動制御部31とを備え、コイル体23を構成するコイルに通電して生じる電磁力によりヨーク17に対してコイル体23が相対的に直線駆動するリニアモータであって、駆動制御部31はコイル体23にパルス電流を供給し且つ供給するパルス電流の周波数を可聴帯域外の周波数としている。
(もっと読む)
インバータ装置の制御方法
【課題】複合電流を構成する2つの電流の周波数が近い場合でも複合電流の実効値を低減させ、IPMの温度が高くなり、耐圧が低下するのを防ぐ。
【解決手段】周波数f1の電流と周波数f2の電流を加え合わせた複合電流を生成するインバータ装置の制御方法において、周波数f1と周波数f2が近い場合、周波数が(f1+f2)/2の補償電流を複合電流に加え合わせる。複合電流は、周波数(f1+f2)/2で振動しながら周波数(f1−f2)/2で振動するから、周波数(f1+f2)/2の振動を打ち消すように周波数(f1+f2)/2の補償電流を加えると、複合電流の周波数(f1−f2)/2の振動の極性が変わったとき、打ち消すように加えた補償電流が逆に足し合わされてしまうので、周波数(f1−f2)/2の振動の極性が変わるごとに、周波数(f1+f2)/2の補償電流の極性を反転させる。
(もっと読む)
インバータ装置の制御方法
【課題】複軸多層構造の回転電機を駆動するための複合電流を生成するインバータ装置の制御破綻を防止する。
【解決手段】インナーロータ、アウターロータのdq軸電流値、インナーロータ、アウターロータの回転数、直流電圧等の各条件に対する指令すべき電流値の関係を予めテーブルとして用意しておき、上記テーブルをルックアップして、2つのロータを制御可能な電源電圧範囲内で制御できるように、電流指令値を設定する。
(もっと読む)
ドア駆動制御装置及びドア駆動制御方法
【課題】 同一車両中の全ドアを閉駆動する際に、電源電圧低下によって同一車両に配置された他の機器の動作に悪影響を及ぼさず、また、電源容量を超えてサーキットブレーカが遮断動作しないようにすること。
【解決手段】 ステータス送受信部9dによって、ドアの開閉及び開閉動作状態を示すステータスデータを、ネットワークを介して他のドア駆動制御装置20−2〜20−8との間で送受信する。データ記憶部9aに、ステータス送受信部9dで受信された他ステータスデータ及び自ステータスデータを記憶する。同時動作可能ドア数設定部9bに電源の容量を超えずに同時動作可能なドア数を設定する。データ読書確認制御部9cによって、閉指令信号の受信時に記憶ステータスデータを参照し、自ドアが開状態であって閉動作中の他ドアが設定ドア数未満の場合に、自ドアを閉動作する制御を行う。
(もっと読む)
モータ駆動用パルス出力IC、および電子カム制御システム
【課題】 電子カム制御において、CPUの負担を軽減すると共に、従節駆動用モータの応答性を向上させると共に、従節駆動用モータを動作させるために設けられていた、単に回転するだけの主軸駆動用モータやエンコーダを不要にする。
【解決手段】 モータ駆動用パルス出力IC20、および電子カム制御システム1は、電子カムの形状データを記憶するカムデータ記憶部24aと、電子カムの主軸回転角度を管理する主軸情報管理部24bと、カムデータ及び主軸情報をもとに、カム半径及びモータ目標位置の計算を行うカム半径・モータ目標位置計算部24dと、従節駆動用モータ10に対して、モータ目標位置まで動作させるためのモータ駆動用パルスを出力するモータ駆動用パルス出力部24eとを備える電子カム従節制御回路10を、仮想主軸のモータ駆動用パルス信号を主軸情報として取り込むことにより自律的に駆動制御する。
(もっと読む)
インバータ装置
【課題】インバータを用いた複数の電動機を合理的に駆動する。
【解決手段】巻線41、42、43を有する第1の電動機44と、巻線45、46、47を有する第2の電動機48を、直列に接続して1つのインバータ49に接続することにより、合理的に駆動されるようにしたものである。
(もっと読む)
複合回転電機の駆動制御方法
【課題】各ロータの電流指令値を求めるにあたり、演算時間が少なくてすみ、また、テーブルデータ記憶容量も少なくすることができる複合回転電機の駆動制御方法を提供する。
【解決手段】永久磁石を有する二つのロータと一つのステータを有し、該ステータコイルに複合電流を通電する複合回転電機の駆動制御方法において、(1)各ロータの電流指令値を、おのおののロータのトルク指令値と回転数のみにより算出される電流指令値をもとに、二つのロータのトルク指令値からそれぞれ得られる係数を掛けることにより算出する、(2)各ロータの電流指令値を、おのおののロータのトルク指令値のみにより算出される電流指令値をもとに、二つのロータのトルク指令値からそれぞれ得られる係数を掛けることにより算出する、または、(3)各ロータの電流指令値を、おのおののロータのトルク指令値のみにより独立に電流指令値が算出する。
(もっと読む)
1 - 20 / 22
[ Back to top ]