
Fターム[5H572JJ13]の内容
Fターム[5H572JJ13]に分類される特許
1 - 20 / 20
通信システム、送信回路、受信回路及び画像形成装置
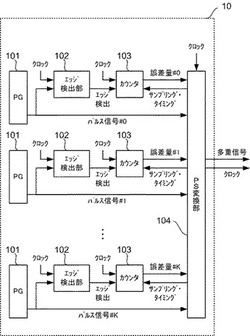
【課題】複数のパルス信号を多重し、かつ、パルス幅の変動を抑える通信システムを提供する。
【解決手段】複数のパルス信号について、各サンプリング・タイミングにおける各パルス信号の振幅を示す値を含む多重信号を生成して送信する送信回路10と、多重信号を受信して複数のパルス信号を出力する受信回路20と、を備えている通信システムであって、送信回路10は、各パルス信号について、サンプリングにより生じるエッジ位置の誤差量を検出するカウンタ103と、検出した誤差量を示す値を多重信号に含めるPS変換部104と、を備えており、受信回路20は、多重信号を分離して各パルス信号の振幅を示す値及び各パルス信号の前記誤差量を示す値を出力するSP変換部201と、各パルス信号について、SP変換部201が出力するパルス信号の振幅を示す値から得られるエッジ位置を、当該パルス信号の誤差量で補正する補正部と、を備えている。
(もっと読む)
モータドライバ

【課題】エアコン室外機等の複数のモータを駆動する装置での部品点数を少なくすることを可能とし、入力端子が少ないモータドライバを提供する。
【解決手段】モータドライバ10は、モータ31,32を駆動する3相インバータ回路16,17を有するモータドライバであって、シリアル信号のモータ速度指令をパラレル信号のモータ速度指令に変換して各3相インバータ回路に出力するシリアルパラレル信号変換部23と、パラレル信号の状態信号をシリアル信号の状態信号に変換して出力するパラレルシリアル信号変換部26と、を備える。
(もっと読む)
送風装置及び電子機器
【課題】冷却能力を高めるために複数のファンを用いて筐体を冷却する送風装置において、ファンから発せられるノイズを抑制することができる送風装置及び電子機器を提供する。
【解決手段】送風装置は、第1のファン11と、第2のファン12とを含む複数のファンを具備し、前記第1のファン11、及び第2のファン12は互いに異なる複数のフィン13a,14aを有し、少なくとも、前記一方のファンのフィン数は素数であり、前記第1のファン11と第2のファン12とは異なる回転数で駆動する。
(もっと読む)
印刷装置
【課題】本発明はDCブラシレスモータを使用する印刷装置に関し、特に転写ベルトへのスジ状のトナーの付着を防止し、用紙にバンド状の画像障害を生じさせることのない印刷装置、及び印刷装置の駆動制御方法を提供するものである。
【解決手段】回転駆動部を駆動するDCブラシレスモータを使用した印刷装置であって、上記DCブラシレスモータの回転磁界を検出する磁気検出手段と、この磁気検出手段の検出信号に基づいて、上記DCブラシレスモータの駆動を制御し、上記回転駆動部の駆動及び停止制御を行う制御手段とを有することを特徴とする。
(もっと読む)
プロセスコントロール装置
【課題】冷却フアンの寿命を均等に延長させることで定期交換周期を延ばし、メンテナンス性が向上できるプロセスコントロール装置を実現する。
【解決手段】収納された電気部品を冷却する常時使用用の冷却ファンと、予備用の冷却ファンとを有するキャビネットを具備するプロセスコントロール装置において、前記常時使用用の冷却ファンと前記予備用の冷却ファンとの全ての冷却ファンの残り寿命時間がほぼ均等になるように前記全ての冷却ファンを所定時間ごとに順次切り替えて使用して前記予備用の冷却ファンの数だけ前記全ての前記冷却ファンを順次休止させるようにされた冷却ファン稼働停止制御装置を具備したことを特徴とするプロセスコントロール装置である。
(もっと読む)
画像形成装置
【課題】回転多面鏡における回転速度の微調整幅の高分解能化と、回路の規模の簡略化とを両立させる。
【解決手段】回転状態検知手段は、回転多面鏡の回転状態を検知し、回転状態を示す回転状態信号を出力する。第1クロック生成手段は、第1クロックを生成する。回転基準信号生成手段は、第1クロックにしたがって順序回路動作を行い、回転多面鏡の回転基準となる回転基準信号を生成する。第2クロック生成手段は、回転基準信号の周期よりも短く、かつ、第1クロックの周期よりも長い周期の第2クロックを生成する。受信手段は、第2クロックにしたがって順序回路動作を行い、回転基準信号を受信する。位相差測定手段は、第2クロックにしたがって回転状態信号と回転基準信号との位相差を測定する。制御手段は、位相差に基づいて駆動手段に加速信号または減速信号を供給する。
(もっと読む)
サーボモータ制御システム及びサーボモータユニット
【課題】集中制御ユニットからの通信指令によりサーボモータを制御するシステムにおいて、モータの原点位置補正を行なう際に、通信デッドタイム期間内のモータ位置ずれの影響を受けにくくする。
【解決手段】サーボモータユニット4側に設けられた原点検出手段8がモータ5の回転にかかる原点位置を検出するに伴い、回転位置演算手段9による現在回転位置の演算値を、該サーボモータユニット内にて予め用意された原点値にリセット補正する現在回転位置補正手段を設ける。サーボモータユニット4は、原点検出した場合、その原点に対応する正しい現在回転位置を集中制御ユニットから通信で受け取るのではなく、サーボモータユニット4内にて予め用意された原点値(つまり、原点に対応する正しい現在回転位置)を用いて現在回転位置の演算値をリセット補正する。
(もっと読む)
モータ制御回路
【課題】従来、異常状態を検知して、モータを流れる電流を停止させ、モータやドライバを破壊から守ることが出来ても、異常状態となった原因を知ることが出来ないと言った問題がある。
【解決手段】本発明は、複数のモータドライバを内蔵しても、1つのシリアルポートを共有して使用することで、外部端子数を削減すると共に、この1つのシリアルポートを使って、複数のモータドライバの異常状態をリアルタイムでマスタICが知ることが出来るモータ制御回路に関する。
(もっと読む)
モータ制御回路
【課題】複数のモータドライバを内蔵するICは、外部端子が数多く必要になると同時、複数個の固有のアドレスが必要となり、固有のアドレスを複数個、準備するのは手間がかかる。更にドライバの数が増えると、アドレスが不足しドライバが制御できない問題が発生する。
【解決手段】本発明は、複数のモータドライバを内蔵しても、1つシリアルポートを共有して使用することで、外部端子数を削減すると共に、1つの固有のアドレスを用いて、複数個のモータを制御することが出来るモータ制御回路に関する。
(もっと読む)
モータ制御回路
【課題】複数のモータドライバを内蔵するICは、外部端子が数多く必要になり、IC単価の価格が上昇する問題がある。
【解決手段】本発明は、複数のモータドライバを内蔵しても、1つシリアルポートを共有して使用することで、外部端子数を削減すると共に、少ない端子で、リアルタイムでの制御が求められるモータ制御を実現するモータ制御回路に関する。
(もっと読む)
同期制御システム、制御装置及び同期制御方法
【課題】複数の制御装置により構成される同期制御システムにおいて、同期運転を実現する際に、安全性を確保すると共に、システム全体として煩雑さを解消し、コストを低減する。
【解決手段】サブマスタ及びスレーブの制御装置10−2〜10−nは、マスタの制御装置10−1により送信された同期カウンタ値Vに基づいて、自らの基準カウンタ値Uを調整し、同期運転を行う。サブマスタの制御装置10−2は、同期カウンタ値Vを受信することができない場合、サブマスタからマスタにモードを切り替え、自らのカウンタ122のカウンタ値をスレーブの制御装置10−3〜10−nへ送信する。スレーブの制御装置10−3〜10−nは、新たなマスタの制御装置10−2からのカウンタ値に基づいて基準カウンタ値Uを調整し、制御装置10−2〜10−nの同期運転を維持する。
(もっと読む)
同期制御システムおよび同期制御システムにおける同期起動方法
【課題】ハイブリッド方式のバーチャル回転指令発生装置とハイブリッド方式のロータリエンコーダを用い、輪転印刷機や枚葉印刷機に用いられる精度の良い同期制御システムを実現すること。
【解決手段】集中制御装置01に内蔵されたバーチャル回転指令発生装置0101は、速度指令と位相指令をそれぞれ独立して演算し出力するとともに時間基準となるフレーム信号を生成し出力する。位相指令と速度指令はバーチャル回転指令通信回線02cを介して同期駆動装置06a〜06fへ出力される。同期駆動装置06a〜06fは上記フレーム信号に基づき位相指令と速度指令及びハイブリッドエンコーダ09a〜09fからの位相フィードバックと速度フィードバックをリアルタイムに検出し、これらに基づき電動機07a〜07fを同期制御する。
(もっと読む)
可動装置
【課題】コストアップを招くことなく可動部の複数箇所相互間のストロークの誤差を防止することができる可動装置を提供すること。
【解決手段】本発明による可動装置1は、可動部を一方の位置から他方の位置までの間において移動させる第一及び第二の移動手段と、第一の移動手段を駆動する第一の電動機2aと、第一の電動機2aの回転数を検出する第一の回転数検出手段4bと、第二の移動手段を駆動する第二の電動機2bと、第二の電動機2bの回転数を検出する第二の回転数検出手段4cと、第一の電動機2a及び第二の電動機2bを制御する制御手段4aとを有する可動装置であって、一方の位置から他方の位置まで可動部を移動させるにあたって必要な第一の電動機2aの回転数NAと第二の電動機2bの回転数NBとを一より大きい公約数を有して相互に異ならせることを特徴とする。
(もっと読む)
位置検出器をマルチドロップ接続した多軸制御システム
【課題】 多軸制御システムの統括CPUの負荷をサーボ制御回路に分散させるとともに、そのCPUを経由しないでマルチドロップ接続された位置検出器からの位置情報をサーボ制御回路に与える。
【解決手段】 コントローラにマスタ通信回路を設置し、位置検出器にはスレーブ通信回路を設置することで、位置検出器の信号線をマルチドロップ接続できるようにするとともに、マスタ通信回路とサーボ制御回路間に専用の信号線を配線する。また、サーボ制御回路を複数軸分統合する。さらには、マスタ通信回路をも統合する。
(もっと読む)
洗濯乾燥機のモータ駆動装置
【課題】複数のモータを安定に正弦波駆動し、低騒音とする。
【解決手段】発振回路1からのクロック信号を受けるプロセッサ2A、2Bのそれぞれに制御され、直流電力を交流電力に変換するインバータ回路3A、3B、3C、モータ6A、6B、6Cを設けることにより、低騒音でかつ、スイッチングノイズの干渉を防いだ安定な正弦波駆動を可能とする。
(もっと読む)
電動機制御装置
【課題】PWM信号で2基の三相電動機を駆動する場合、大電流スイッチングに伴う大きな電流パルスが発生し、平滑用コンデンサの負担が大きくなっていた。しかし、スイッチングのタイミングを互いにずらせる方法が提案されているがずらせる位相の自由度、あるいは回路規模の点で問題があった。本発明は出来るだけ簡単な回路規模で任意に位相調整を可能にする装置の実現を目的とした。
【解決手段】2基の電動機制御用の2組のPWM波形を生成する周期の等しい2キャリアの周期をクロックの数で計数し、一方のキャリアに対し所定の計数値だけ異なる位相差を設定し、この状態でキャリアの周期単位で計数値を積算し、所望の位相差となるように相互の位相関係をずらせる方法としている。
(もっと読む)
アクチュエータ装置
【課題】 一対のリニア駆動式駆動部をその同期を図りながら作動させ、これにより被駆動部材を駆動させる。
【解決手段】 アクチュエータ装置10では、制御回路部66が、各回転数検出器17からのパルス数に基づいて一対の駆動部14L,14Rの各駆動モータ16のうち回転数の高い方の駆動モータ16を判別すると共に、各回転数検出器17からのパルス数が等しくなるように回転数の高い方の駆動モータ16を回転数の低い方の駆動モータ16に同期させる。そして、アクチュエータ装置10において、別体に形成された一対の駆動部14L,14Rのそれぞれは、駆動モータ16の回転駆動力を回転直動変換機構18により直動駆動力に変換して出力軸20を進退動させるリニア駆動式の構成となっている。
(もっと読む)
モータ駆動用パルス出力IC、および電子カム制御システム
【課題】 電子カム制御において、CPUの負担を軽減すると共に、従節駆動用モータの応答性を向上させると共に、従節駆動用モータを動作させるために設けられていた、単に回転するだけの主軸駆動用モータやエンコーダを不要にする。
【解決手段】 モータ駆動用パルス出力IC20、および電子カム制御システム1は、電子カムの形状データを記憶するカムデータ記憶部24aと、電子カムの主軸回転角度を管理する主軸情報管理部24bと、カムデータ及び主軸情報をもとに、カム半径及びモータ目標位置の計算を行うカム半径・モータ目標位置計算部24dと、従節駆動用モータ10に対して、モータ目標位置まで動作させるためのモータ駆動用パルスを出力するモータ駆動用パルス出力部24eとを備える電子カム従節制御回路10を、仮想主軸のモータ駆動用パルス信号を主軸情報として取り込むことにより自律的に駆動制御する。
(もっと読む)
リニアアクチュエータ
【課題】 一対のリニアモータのスライダ間をアーム部材で結合するリニアモータで発生する各モータ間の位置誤差を補正して高精度の位置決め制御を可能とするリニアアクチュエータを実現する。
【解決手段】 位置検出手段を備えた一対のリニアモータのステータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力の和に基づき前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記一対の位置検出手段の出力の差に基づき前記スライダ間の位置誤差信号を算出する位置誤差検出手段と、
前記中点位置信号と目標位置信号との偏差に基づく推力指令によりドライバを介して前記リニアモータのスライダを駆動する中点位置制御手段と、
前記位置誤差信号を演算した補正信号を前記推力指令に差動的に重畳させる姿勢制御手段と、
を備える。
(もっと読む)
モータ制御装置、画像形成装置、モータ制御方法、及びプログラム
【課題】 ステッピングモータの効率良い電流制御等を可能としたモータ制御装置、画像形成装置、モータ制御方法、及びプログラムを提供する。
【解決手段】 画像形成装置は、フィードバックステッピングモータ55、フィードバックモータ駆動回路70、時間カウンタ72、パルスカウンタ73、ステッピングモータ60、ステッピングモータ電流制御回路74、駆動回路75を備える。用紙搬送開始後、フィードバックステッピングモータ55及びステッピングモータ60を通常電流I0で駆動し、用紙がフィードバックステッピングモータ55を通過し給紙ローラ42-2に突入する直前に、ステッピングモータ60の駆動電流値を通常電流I0から最大電流I1に切り替え、用紙が給紙ローラ42-2に完全に挟持された状態で、ステッピングモータ60の駆動電流値を最大電流I1から通常電流I0に切り替える。
(もっと読む)
1 - 20 / 20
[ Back to top ]