
Fターム[5H572KK07]の内容
Fターム[5H572KK07]に分類される特許
1 - 13 / 13
同期制御システム
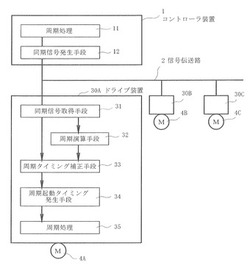
【課題】コントローラ装置の制御周期Tcがドライブ装置の駆動周期Tdの整数倍ではない場合にも同期を確保して設計上の自由度を増大させる。
【解決手段】コントローラ装置1の制御周期よりも駆動周期が短いドライブ装置30Aが、コントローラ装置1からの同期信号に合わせて駆動周期の起動タイミングを調整する周期タイミング補正手段33を備え、調整後の起動タイミングに従って駆動されるシステムにおいて、制御周期が駆動周期の整数倍でない場合に、制御周期に含まれる駆動周期の回数と端数時間とを求め、駆動周期の回数を変えずに1回以上の駆動周期を増加させた時の増加分の合計時間が前記端数時間に一致するように当該駆動周期を演算し、または、駆動周期の回数を増加させて1回以上の駆動周期を減少させた時の減少分の合計時間が元の駆動周期と端数時間との差に一致するように当該駆動周期を演算する周期演算手段32を備える。
(もっと読む)
モータ制御システム、モータ制御装置およびモータ制御方法

【課題】多数のモータを円滑に協調して動作させることができるモータ制御システムを提供する。
【解決手段】モータ制御システム1は、モータ101を動作させるドライバ111を有するモータ制御装置100と、モータ201を動作させるドライバ211を有するモータ制御装置200と、モータ101を動作させる第1コマンド、および、モータ201を動作させる第2コマンドの両方を含むコマンド列の処理を要求するコマンド列処理要求部11を有する管理装置10とを備え、モータ制御装置100は、第1コマンドを実行するコマンド実行部121と、第2コマンドの実行をモータ制御装置200に要求するコマンド実行要求部122とを備える。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
モータ制御装置とその制御方法
【課題】1ノードに複数のパワーもジュールをもつモータ制御装置であり、セットアップ以後でも容量変更が可能なモータ制御装置とその制御方法を提供する。
【解決手段】 コントローラが生成する位置制御コマンドを受信し、位置制御コマンドを解読して位置指令を生成し、位置指令とモータ位置に基づいてモータを駆動するモータ制御装置において、位置制御コマンドを受信し、自身のステータス情報をコントローラに返信するとともに位置制御コマンドを解読して位置指令を生成し、位置指令をパワーモジュールに送信するCPUモジュール(3)と、位置指令を受信し、位置指令とモータ位置に基づいてモータを駆動するとともに、自身のチップIDをメモリに保存する複数のパワーモジュール(4、5、6)と、を備え、CPUモジュールは電源投入時にパワーモジュールの任意の一軸のチップIDを読み込み、サーボ制御装置自身のチップIDとし、ネットワーク上の他ノードとの識別を行う。
(もっと読む)
ルーパー設備及びルーパー制御方法
【課題】張力変動を抑えつつ各ストランド間の張力偏差を小さく抑えることが可能なルーパー設備7を提供する。
【解決手段】多ストランド式ルーパー設備7である。少なくとも1つの固定ロールを回転駆動する固定ロール用の電動機を備え、金属帯と固定ロールとの間の機械損失及び金属帯の曲げ損失を補償するように、上記固定ロール用の電動機を駆動制御する。
(もっと読む)
インバータ制御装置
【課題】
簡易な構成により信頼性の高いインバータ制御装置を提供する。
【解決手段】
車両のエネルギーを制御するCPU14と、第1のモータ26の発電量またはアシスト量を制御するCPU15と、第2のモータ27の発電量またはアシスト量を制御するCPU16と、CPU14,CPU15,CPU16に供給される電源を生成するレギュレータ8と、CPU15により制御される第1のインバータ23と、CPU16により制御される第2のインバータ24と、CPU14,CPU15,CPU16の間を接続した通信線17とを有し、第1のインバータ23及び第2のインバータ24は、協調または独立して制御される。
(もっと読む)
モータ制御用シリアル通信装置
【課題】通信回線に異常が発生した場合でも、モータのサーボ特性を劣化させることなく同期駆動させることが可能なモータ制御用シリアル通信装置を提供する。
【解決手段】モータ駆動装置1209〜120nは、上位側装置と互いにシリアルに接続されデータを相互に送受信してモータ1009を駆動する。通信ケーブル1201に断線が発生したとき、上位制御装置から制御指令信号が入力されなくなる最上位のモータ駆動装置1209が、上位制御装置に代わって、モータ駆動装置1209〜120nを同期させる同期信号を出力し、各モータ駆動装置により駆動されるモータ1009を同期駆動させる。このような構成では、サーボ特性を劣化させることなく、各モータを同期して停止させたりあるいは目標位置に移動させることができ、安全性に優れたモータ制御が実現される。
(もっと読む)
マスターサーボならびにブースターサーボ、マスターサーボとブースターサーボを有する多重系サーボユニット
【課題】複数のサーボより理想的な合算トルクを得ることができる多重系サーボユニットを提供する。
【解決課題】マスターサーボ10とブースターサーボ20は、接続コード30を介して電気的に接続されている。マスターサーボ10は、入力される制御信号に基づいて駆動信号を生成し、該駆動信号により駆動する。ブースターサーボ20は、マスターサーボ10で生成される駆動信号が接続コード30を介して供給されることにより駆動する。両サーボは、同一の駆動信号により駆動することとなるため、駆動量を一律にすることができ、動作のずれを生じることがない。
(もっと読む)
共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法
【課題】複数のクレーンの動作を制御し複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置において、作業者のミス等により搬送が失敗する虞れなく、動作指令の生成を容易とし操作の効率を向上させ、搬送物の揺れを抑えるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できるようにする。
【解決手段】複数のクレーン1,2のうちの一は、作業者の操作によって動作するリーダクレーン1であり、他のクレーンは、制御装置により制御されて動作するフォロワクレーン2である。制御装置は、フォロワクレーン2における搬送物3の振れ幅に基づいてフォロワクレーン2のリーダクレーン1に対する距離偏差を推定し、推定された距離偏差をなくすようにフォロワクレーン2ヘの動作指令を生成する。この動作指令によりフォロワクレーン2を動作させてリーダクレーン1の動作に追従させる。
(もっと読む)
インバータ・モータ試験装置
【課題】交流電源及び直流電源の容量を抑制して安価で小型なインバータ・モータ装置を実現する。
【解決手段】2台のモータ2,3を対向設置して各々にインバータ装置10,11を接続し、モータ2,3の各回転軸4,5を動力伝達機構6を介して結合する。インバータ装置10,11に電力を供給するDC電源装置20は、インバータ装置10,11に対する定常的な電力の授受に見合った電源容量とし、DC電源装置20に、過渡的な電力の授受を行う蓄電装置30を並列に接続する。これにより、モータ間で高効率で電力を還流させてシステムに要する交流電源及び直流電源の容量を抑制し、試験装置を安価で小型なものとしてインバータ・モータの評価に適した装置とすることができる。
(もっと読む)
モータ駆動用パルス出力IC
【課題】 モータ駆動用パルス出力ICによって従節駆動用モータを自律的に駆動制御すると共に、従節駆動用モータの駆動制御を任意の主軸回転角度からスタートできるようにする。
【解決手段】 入力データに応じたパターンのモータ駆動用パルスを出力するモータ駆動用パルス出力IC20であって、カムデータ記憶部24a、主軸情報管理部24b、カム半径・モータ目標位置計算部24d及びモータ駆動用パルス出力部24eから構成される電子カム従節制御回路24により、従節駆動用モータ10Bを自律的に駆動制御すべく構成され、更に、従節駆動用モータ10Bの駆動制御がスタートされるべき主軸回転角度情報を保持するスタート角度保持回路26と、該スタート角度保持回路26の保持角度と現在の主軸回転角度を比較し、これらが一致したとき電子カム従節制御回路24に対してモータ駆動制御のスタートを指示するスタート判定回路24とを備える。
(もっと読む)
アクチュエータ制御システム、アクチュエータ及びアドレス設定方法
【課題】 アクチュエータの大型化や取付作業の煩雑化、及びアドレスの誤設定を招くことなく、複数のアクチュエータを単純に管理することのできるアクチュエータ制御システムを提供すること。
【解決手段】 各アクチュエータ5は、制御部によりその作動が制御される無線送受信部31を備える。無線送受信部31は、アドレス要求信号Saを送信する無線送信部32と、該アドレス要求信号Saに基づくアドレス識別信号Sbを受信する無線受信部33とを備え、各アクチュエータ5がエアコンユニット本体2に取り付けられた状態において、その取付部10と非接触且つ該取付部10と対向する位置に設けられる。そして、制御部は、無線受信部33が受信したアドレス識別信号Sbに基づきアドレスの取得・設定を行なうアドレス取得部を備える。
(もっと読む)
モータ制御装置、画像形成装置、モータ制御方法、及びプログラム
【課題】 ステッピングモータの効率良い電流制御等を可能としたモータ制御装置、画像形成装置、モータ制御方法、及びプログラムを提供する。
【解決手段】 画像形成装置は、フィードバックステッピングモータ55、フィードバックモータ駆動回路70、時間カウンタ72、パルスカウンタ73、ステッピングモータ60、ステッピングモータ電流制御回路74、駆動回路75を備える。用紙搬送開始後、フィードバックステッピングモータ55及びステッピングモータ60を通常電流I0で駆動し、用紙がフィードバックステッピングモータ55を通過し給紙ローラ42-2に突入する直前に、ステッピングモータ60の駆動電流値を通常電流I0から最大電流I1に切り替え、用紙が給紙ローラ42-2に完全に挟持された状態で、ステッピングモータ60の駆動電流値を最大電流I1から通常電流I0に切り替える。
(もっと読む)
1 - 13 / 13
[ Back to top ]