
Fターム[5H572LL50]の内容
Fターム[5H572LL50]に分類される特許
1 - 20 / 41
直流交流変換装置を接続可能なモータ駆動制御装置
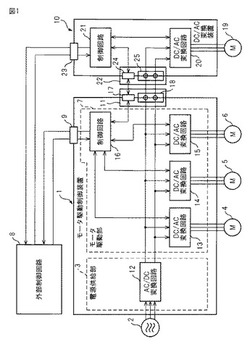
【課題】DC/AC変換装置を接続可能なモータ駆動制御装置において、モータ駆動制御装置に接続したDC/AC変換装置に接続されたモータの出力が大きい場合でも、AC/DC変換回路が過負荷状態になる事態を回避することができるモータ駆動制御装置を提供する。
【解決手段】接続部11にDC/AC変換回路20を接続したときのモータ4,5,6,19の出力の合計がAC/DC変換回路12によって供給可能な電力を超えると予測される場合、制御装置16は、モータ4,5,6,19の出力の合計をAC/DC変換回路12によって供給可能な電力以下に維持しながらAC/DC変換回路12からDC/AC変換回路13,14,15,20への直流電圧又は直流電流の供給又は供給停止を制御する。
(もっと読む)
モータ制御装置

【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
ドラム式洗濯機
【課題】インバータ回路に供給する直流電圧を、ドラムモータの目標回転数Ntと現在回転数Npの差に応じた適切な条件で昇圧制御することが可能なモータ駆動装置を備える。
【解決手段】ドラムモータ7を駆動制御する第1インバータ回路25には、整流回路36から平滑用コンデンサ37、38を介して出力される直流電圧Vdが印加される。第1インバータ回路を駆動する制御部30は、少なくとも脱水工程の一部期間において、短絡制御素子を導通させる短絡信号を交流電源電圧のゼロクロス検出点を起点として生成し、短絡信号のパルス幅Twを、ドラムモータの目標回転数Ntと現在回転数Npの差に応じて設定された直流電圧Vdの目標電圧Vt、及び直流電圧Vdの検出値に基づいて設定する。
(もっと読む)
プラント制御装置及び厚板圧延システム
【課題】対象プラントの生産性を低下させることなく、モータの過熱保護による操業停止を確実に防止できるプラント制御装置を提供する。
【解決手段】モータ2を駆動するドライブ装置3と、モータ2の速度基準を生成し、その生成した速度基準をドライブ装置3に送信するコントローラ4とを有するプラント制御装置1において、RMS値計算手段6及び加減速レート調整手段9を備える。RMS値計算手段6は、モータ2のトルク電流の実効値を計算する。加減速レート調整手段9は、RMS値計算手段6によって計算された実効値が所定の規定値を超えている場合に、上記速度基準の加減速レートを調整し、モータ2の過熱保護による操業停止を防止する。
(もっと読む)
船舶電力システム
【課題】外部の電源で充電した複数の蓄電池の電力をほぼ均等に使用して各蓄電池を効率よく使用できる船舶電力システムを提供する。
【解決手段】蓄電池8A,8Bと、この蓄電池から船舶の推進用電動機である多巻線電動機1の1巻線と船内負荷16へ供給される電力とをそれぞれ制御する第1のインバータ7A,7Bと第2のインバータ6A,6Bとからなるインバータ装置22,23と、このインバータ装置を多巻線電動機1の巻線数分だけ複数設け、この複数のインバータ装置で多巻線電動機を駆動したり、或いはその一部を多巻線電動機の巻線から切離し、他の非推進用電動機11を駆動するよう構成する。各インバータ装置に第1のインバータの出力電力を検出する電力検出器20A,20Bを設け、検出した電力の偏差を求め、偏差に応じて第2のインバータを制御することにより、蓄電池の充電状態がほぼ等しくなるよう制御する制御装置18を備える。
(もっと読む)
モータ駆動装置およびそれを搭載する車両
【課題】複数の電力変換装置を含むモータ駆動装置において、複雑な制御ロジックを用いることなく損失を低減する。
【解決手段】モータ駆動装置20は、電力変換装置であるコンバータ12およびインバータ14,22と、ECU30とを備え、蓄電装置28からの電力を用いてモータジェネレータMG1,MG2を駆動する。ECU30は、インバータ14,22に供給されるシステム電圧VHにおける各電力変換装置の損失を演算するとともに、得られた損失が最大となる電力変換装置において生じる損失が、当該電力変換装置についての駆動指令値が達成可能な範囲で最小となるように、システム電圧VHの電圧指令値を設定する。
(もっと読む)
制御装置
【課題】複数の制御対象を制御するための処理の増加に対して柔軟に対応可能な制御装置を提供すること。
【解決手段】 複数の制御対象を制御する制御装置は、複数の制御対象の入出力電力に応じて、複数の制御対象を制御するための各処理の優先度を決定する優先度決定部と、単位時間中に行われると推定される複数の制御対象の各処理に要する合計時間の総和に応じて、複数の制御対象の少なくともいずれか1つの処理を省略するか否かを決定する処理省略決定部と、処理省略決定部によって処理を省略すると決定された場合、優先度決定部が決定した優先度に基づいて、複数の制御対象の内、どの制御対象の処理を省略するかを決定する省略処理決定部とを備える。
(もっと読む)
サーボ制御装置およびモーションコントロールシステム
【課題】送受信の配置の衝突が繰り返される間、モーションコントロールシステム全体の初期化が遅延する。
【解決手段】第一の通信手段106はMDI結線、第二の通信手段107はMDI−X結線とすることで、通信ケーブル4としてストレートケーブルを選択した場合、主電源を入れ、夫々のサーボ制御装置1の電源が同時に入るとき、夫々のサーボ制御装置1同士の接続において、送受信ペアの衝突が発生しないようにすることが可能となる。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更を不要とし、電力変換回路の数を抑制して車体の振動乗り心地を改善する。
【解決手段】車体が搭載される2台の台車のうち,前方の台車の前方の車輪を駆動する電動機と後方の台車の前方の台車を駆動する電動機とが並列接続され,前方の台車の後方の車輪を駆動する電動機と後方の台車の後方の車輪を駆動する電動機とが並列接続され,2組の並列接続した電動機の組み合わせに対し逆方向の振動トルクが重畳するように制御することにより電動機のトルク変動を用いて2台の台車に同一の上下力を発生させてそれぞれの台車の上下振動を抑制することにより車体が前後線対称形状に弾性変形する振動を間接的に抑制することを特徴とする電気車制御装置。
(もっと読む)
電気車駆動システム
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、車体の振動乗り心地を改善する手法が必要である。また、電動台車で容易に実現できる手法が望ましい。
【解決手段】車輪を有する台車の上に車体が搭載された電気車であり、台車に装荷された電動機が歯車を内蔵した駆動装置を介して車輪を駆動することにより走行する電気車両において、電動機のトルクにより車体の振動抑制制御を行う。また、台車振動を電動機の回転速度から演算した情報をもとに電動機のトルクにより台車振動を抑制し、間接的に車体の振動の抑制を行う。
(もっと読む)
電源接続方法
【課題】 ステージを移動させる複数のモータのそれぞれに電力を供給する複数の下流電源に接続する上流電源の数を減少させることができる電源供給方法を提供する。
【解決手段】 ベースに対してステージを移動させる複数のモータ12a〜12hのそれぞれに接続される複数の下流電源10a〜10hの電源接続方法であって、少なくとも2つの上流電源4,6の中の1の上流電源4の下流電源10a〜10dに対して供給する最大電力が、上流電源4に接続される下流電源10a〜10dのモータ12a〜12dに対して供給する最大電力の和より小さく、かつ下流電源10a〜10dの各時間におけるモータ12a〜12dに対して供給する電力の和が、上流電源4の下流電源10a〜10dに対して供給する最大電力を超えないように、上流電源4に接続する下流電源10a〜10dを選択し、選択された下流電源10a〜10dを上流電源4に接続する。
(もっと読む)
可動物体の位置を制御する方法、位置決め装置を制御する制御システム、およびリソグラフィ装置
【課題】さまざまなタイプのモータを同一の可動物体の作動のために使用でき、かつそのようなモータの使用による望ましくない効果を回避するアクチュエータ構成および制御を提供する。
【解決手段】少なくとも1つのリラクタンスモータを介して所定の自由度で変位可能な位置決め装置を制御する制御システムが、少なくとも1つの力感知素子と、リラクタンスモータによって加えられた力の量を感知する対応する力感知素子からの出力に基づいて、リラクタンスモータによって加えられた力の量を調整するコントローラとを含む。
(もっと読む)
生産設備、制御装置、制御方法、制御プログラム
【課題】消費電力のピークを無くして生産設備全体として消費電力の平準化を図る。
【解決手段】回生電力を発生させることのできる動力装置であって、同一の電力源104に接続される第一動力装置110、及び、第二動力装置120と、第一動力装置110と、第二動力装置120とのそれぞれの消費電力を監視する監視部133と、第一動力装置110が回生電力を発生させる場合に、その回生電力を消費可能にし、電力を多く消費する傾向になるように第二動力装置120を制御する、または、第一動力装置110が電力を多く消費する傾向となる場合に、回生電力を発生させるように第二動力装置120を制御する回生制御部134と、を備える。
(もっと読む)
多軸モータドライブシステムとその共通コンバータの過負荷保護方法及び装置
【課題】共通コンバータのコストやサイズの増大化を回避して、かかる瞬時的な過大電流に対しても、この共通コンバータを保護することができるようにする。
【解決手段】各サーボアンプ3a〜3cにおいて、電流指令値Ii*と速度検出値ωiと直流電圧検出値Vdciとから夫々の消費電流値Iia,Iib,Iicを求め、コンバータ出力電流演算部21でこれらを加算して総合消費電流値Icvoを求め、時限演算部22でこの総合消費電流値Icvoに該当する補完値f(Icvo)をデータベースから求めて過負荷判定値Is(k)を求める。そして、過負荷判定部23において、過負荷判定値Is(k)を共通コンバータ2(図7)の容量に応じた判定閾値Ithと比較し、Is(k)≧Ithときには、共通コンバータ2は過負荷状態にあるものとして、サーボアンプ3a〜3cの動作を停止させる。
(もっと読む)
電気掃除機
【課題】各電動送風機の累積動作時間を均一化して、使用寿命をより向上できる電気掃除機を提供する。
【解決手段】電動送風機15A,15Bを収容した掃除機本体11を備える。電動送風機15A,15Bの駆動を独立して制御可能な制御手段16を備える。制御手段16が、電動送風機15の少なくともいずれかを除く残りの他の電動送風機15を動作させる中モードおよび弱モードと、全ての電動送風機15を動作させる強モードとを有し、強モードから中モード(弱モード)に切り換えるときに、少なくとも前回中モード(弱モード)で動作させなかった電動送風機15を動作させる。各電動送風機15の累積動作時間を均一化し、使用寿命をより向上できる。
(もっと読む)
モータ制御回路
【課題】複数のモータドライバを内蔵するICは、外部端子が数多く必要になると同時、複数個の固有のアドレスが必要となり、固有のアドレスを複数個、準備するのは手間がかかる。更にドライバの数が増えると、アドレスが不足しドライバが制御できない問題が発生する。
【解決手段】本発明は、複数のモータドライバを内蔵しても、1つシリアルポートを共有して使用することで、外部端子数を削減すると共に、1つの固有のアドレスを用いて、複数個のモータを制御することが出来るモータ制御回路に関する。
(もっと読む)
消費電力量および回生電力量を計算するサーボモータ駆動制御装置
【課題】複数のアンプ群を有する電源構成の機械システムにおいて、消費電力量や回生電力量の適切な評価を可能とする。
【解決手段】上位の電源に接続された共通電源部と、それからサーボモータに電力を供給する複数の電力供給部と、からそれぞれ構成されている複数のアンプ群を有する機械システムのサーボモータ駆動制御装置は、アンプ群毎の電力量を求めるアンプ群電力検出部を有する。各アンプ群電力検出部は、それに該当するアンプ群に属する電力供給部に接続されたサーボモータについての個別周期電力量dEakを合計して、当該アンプ群での消費電力量または回生電力量であるアンプ群周期電力量dEbgを求め、それを所定の期間にわたって積算してアンプ群消費電力量Ebngを求める。個別周期電力量dEakは、サーボモータが電力を消費している場合に正の値であり、サーボモータが電力を回生している場合に負の値である。
(もっと読む)
モータ制御装置および画像形成装置
【課題】簡易な方法で遅延なく処理を適切に行うことができるモータ制御装置を提供することである。
【解決手段】制御部は、モータAの駆動を開始する(S12)。そして、モータAの回転が定常運転となると(S13)、制御部は、所定のタイミングであるため(S14において、YES)、モータAの駆動を開始してから、モータAの回転が定常運転となるまでに要したモータAの立ち上がり時間を計測する(S15)。また、制御部は、モータBの駆動を開始して、モータBの立ち上がり時間を計測する(S17)。また、制御部は、モータCの駆動を開始して、モータCの立ち上がり時間を計測する(S19)。そうすると、制御部は、モータA、モータBおよびモータCの立ち上がり時間をそれぞれ比較して、所定のタイミングで駆動を開始する順位を変更する(S22)。
(もっと読む)
多軸ドライバシステム
【課題】 多軸ドライバユニット内の複数のドライバを有効利用することができる多軸ドライバシステムを提供する。
【解決手段】 4台のドライバD1〜D4は、それぞれが内蔵するCPUが第1及び第2の通信ラインL1及びL2の両方にシリアル通信可能に接続されている。各ドライバが内蔵するCPUは、通信切り分け用開閉スイッチSW1がオン状態にあるときには、第1の通信ラインL1からコマンドを受信する。また内蔵するCPUは、通信切り分け用開閉スイッチSW1がオフ状態にあるときには、切り分け箇所設定用スイッチDSWの設定により、ドライバD1〜D4を第1の通信ラインL1からシリアル通信によりコマンドを受信する第1のグループと、第2の通信ラインL2からシリアル通信によりコマンドを受信する第2のグループとに分ける。
(もっと読む)
短絡相特定方法
【課題】モータ及びインバータにおける故障モードを検出してモータ制御装置の短絡相を特定する短絡相特定方法を提供する。
【解決手段】車両駆動装置1は、直流電源であるバッテリ15と、バッテリ15の電圧を昇圧するコンバータ14と、車両を駆動するMG1モータ11に接続されたインバータ28と、モータ又は発電機として機能するMG2モータ・ジェネレータ12に接続されたインバータ29と、モータを制御するモータ制御装置18と、を含んでいる。車両駆動装置1には、電圧計と、各インバータ28,29の無通電状態を判定する無通電判定器13,14と、インバータの各相アームからモータに印加される電流を検出する電流計41〜44と、が設けられており、これらの信号及び無通電判定器14からの信号はモータ制御装置18へ送られる。
(もっと読む)
1 - 20 / 41
[ Back to top ]