
Fターム[5H611RR06]の内容
電動機、発電機と測定・保護装置等との結合 (11,439) | 検出手段 (800) | 光センサを用いるもの (119) | 反射型 (26)
Fターム[5H611RR06]に分類される特許
1 - 20 / 26
サーボモータ
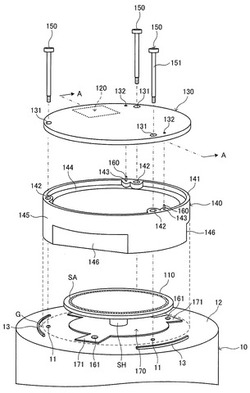
【課題】エンコーダの検査を高精度且つ容易に行うことが可能なサーボモータを提供する。
【解決手段】エンコーダ100は、シャフトSHに連結され、複数の反射スリット111からなるスリットアレイSAが円周方向に沿って形成された円板状のディスク110と、スリットアレイSAに光を照射する点光源121、及び、点光源121から照射されスリットアレイSAで反射された光を受光する受光アレイ122を備えた光学モジュール120と、光学モジュール120が設けられる基板130と、モータMのハウジング10に固定され、ディスク110を内部に収容しつつ、光学モジュール120がスリットアレイSAと対向するように基板130を支持する、円筒状の支持部材140と、を有する。
(もっと読む)
電気機械装置およびそれを用いたアクチュエーター、モーター、ロボット、ロボットハンド。

【課題】電気機械装置を小型化する技術を提供する。
【解決手段】中心軸110と、前記中心軸の外周に沿って配置されたローター磁石123を有し、前記中心軸と前記ローター磁石との間において少なくとも前記中心軸の軸方向の一方に開口した収納空間を有するローター121と、前記ローターの外周に配置されたステーター122と、前記収納空間に配置され、前記ローターと一体に構成された回転数変換機構130と、前記ステーターの内側に配置され、前記回転数変換機構と回転負荷とを接続する負荷接続部133と、前記ステーターと前記負荷接続部との間に設けられたクロスローラーベアリング137とを備える。
(もっと読む)
モータ付属の仕切り構造、真空用モータ
【課題】真空側空間に不純物ガスを放出しないモータ付属の仕切り構造を提供する。
【解決手段】前記開口部と前記透過板との間において、高圧側から低圧側に向かって前記固着部材、前記密閉部材の順に設けられてなる。
(もっと読む)
駆動装置及びロボット装置
【課題】回転情報の制御の精度低下を抑制できる駆動装置を提供する。
【解決手段】駆動装置は、中空部、及び中空部から外周面へ通じる貫通孔を有する第1軸部材と、中空部に挿入され、第1軸部材と動力伝達部を介して連結された第2軸部材と、第1軸部材を回転させる駆動部と、第1軸部材と第2軸部材とのうちの一方の軸部材に設けられたスケールを有し、一方の軸部材の回転に関する情報を検出する検出部と、を備える。
(もっと読む)
駆動装置及びロボット装置
【課題】回転数制御の精度の低下を抑制できる駆動装置を提供する。
【解決手段】駆動装置は、中空部を有する第1軸部と第2軸部とがユニバーサルジョイントで互いに接続された第1軸部材と、中空部に挿入され、第1軸部材と動力伝達部を介して連結された第2軸部材と、第1軸部材を回転させる駆動部と、第1軸部材と第2軸部材とのうちの一方の軸部材に設けられたスケールを有し、一方の軸部材の回転に関する情報を検出する検出部と、を備える。
(もっと読む)
サーボモータ製造方法、サーボモータ製造装置、サーボモータ、エンコーダ
【課題】受光素子を備えた光学モジュールと回転ディスクとが比較的大きく離れて配置されていても、回転ディスクや光学モジュールの位置調整を精度良く行いつつ、サーボモータを容易に製造できるようにする。
【解決手段】回転ディスク110に形成した同心円パターンCPに対向して配置したリニアエンコーダ160の出力信号に基づき、シャフトSHの回転軸AXと回転ディスク110のディスク中心Oとが一致するように回転ディスク110の位置を調整する。また、光学モジュール120が同心円パターンCPからの反射光を受光する位置調整用受光素子群150L,150Rを基板121上に備える。位置調整用受光素子群150L,150Rの各出力信号の振幅変化に基づき、光学モジュール120の半径方向位置を調整する。また、位置調整用受光素子群150L,150Rの各出力信号の位相差に基づき、光学モジュール120の傾斜方向の位置を調整する。
(もっと読む)
エンコーダー及び電気機械装置
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、前記回転円盤上において前記回転円盤の円周に沿って等間隔に設けられたm個(mは2以上の整数)のスリット又は反射板で構成される光学要素列311と、前記光学要素列に光を照射する発光部320と、前記光学要素列の個々の光学要素を透過する、または反射する光を受光して矩形状の受光信号を出力する受光部371〜374と、を備え、前記発光部と前記受光部は、n組配置されており、個々の受光信号の1周期の位相差を2πと定義したとき、n個の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
エンコーダー及び電気機械装置。
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、回転円盤上において等間隔に設けられたスリット又は反射板で構成される光学要素列311〜314と、光学要素列に光を照射する発光部321〜324と、光学要素列の個々の光学要素からの光を受光して矩形状の受光信号を出力する受光部371〜374とを備え、光学要素列は、回転円盤の中心からの距離が互いに異なるn個(nは2以上の整数)の円周に沿ってn列配置されており、n組の光学要素列は、等しい個数のm個(mは2以上の整数)の光学要素を含んでおり、発光部と受光部は、n組の光学要素列に対応してn組配置され、個々の受光信号の1周期の位相差を2πと定義したとき、n組の光学要素列とn組の発光部及び受光部とは、n組の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
画像形成装置
【課題】駆動モータの回転方向を検知することが可能な画像形成装置を提供する。
【解決手段】画像形成装置1は、駆動モータ33の回転位置を検出して検出信号を出力する位置検出部39と、回転多面鏡によって偏向された光ビームLを受光して受光信号を出力するセンサ32と、位置信号及び受光信号を受けて、回転位置の検出とセンサでの受光とのタイミングパターンに基づき駆動モータの回転方向を検知する検知部38と、を備える。
(もっと読む)
位置センサユニット、3相交流型リニアモータ
【課題】3相交流型リニアモータにおいて、複数種類のリニアモータで固定子と可動子の相対位置関係を検出するための位置センサユニットを共通化する。
【解決手段】3つの位置センサ2u,2v,2wを、固定子11の基準ピッチPに対して、基準点A、基準点Aから1P/3離れた位置B、基準点Aから2P/3離れた位置C、の3箇所に順次配置して位置センサユニット1とすることで、基準ピッチのn倍(3の倍数を除く)の固定子21でも同一の位置センサユニット1を共用可能とした。
(もっと読む)
ブラシレスDCモータ
【課題】アキシャルギャップ型のコアレスブラシレスDCモータの速度センサを限られたスペースに配置し、高精度で安価な速度センサ付きモータを提供する。
【解決手段】円周方向にN極、S極を等間隔に着磁したリング状マグネット5と空隙を介して対向配設された複数の空心コイル6から構成されるアキシャルギャップ型ブラシレスDCモータにおいて、空心コイル6の空心部分に反射型のフォトセンサ7を内蔵し、リング状マグネット5が空心コイル6と対向する表面に、円板状の放射スリットを有する反射板8を配置する。
(もっと読む)
不要ワニスの検査装置及び検査方法
【課題】ステータコアに付着した不要ワニスを容易かつ正確に検知することができる不要ワニス検査装置を提供すること。
【解決手段】ステータコア80に設けたコイル7に電気的絶縁性を維持するためのワニス9を含浸させてなるステータ8における、ステータコア80の表面に付着した不要ワニス99を検知する装置であって、不要ワニス99を励起発光させることが可能な検査光50を、ステータコア80の表面の検査領域に向けて照射する光源5と、ステータコア80の表面の検査領域を撮影するためのカメラ6と、カメラ6を通して採取した画像データを解析して不要ワニス99の付着位置を特定する判定手段45と、検査光50がステータコア80の軸方向端面81から突出したコイルエンド部70に照射されることを防止するためにコイルエンド部70の少なくとも一部を覆うマスク部3とを有する。検査光50は紫外線であることが好ましい。
(もっと読む)
ブラシレスモータ
【課題】簡易な手段でエンコーダカバーとモータ本体の間に生じる隙間を適切に塞ぐ中空形状のシャフトを有するブラシレスモータを提供する。
【解決手段】中空円筒形状でブラケット9、10に回転可能に支持されたシャフト4を備え、シャフト4は、一方のブラケット9の貫通孔9aから外部に突出した突出部4aを有する。突出部4aにはエンコーダリング14aが取り付けされ、ブラケット9には光センサ15が取り付けられる。エンコーダ13を覆うように、有底円筒形状のエンコーダカバー17がブラケット9に取り付けられる。また、エンコーダカバー17には、貫通孔9aに対向する開孔17cが設けられている。ここで、エンコーダカバー17と突出部4aとに接して、エンコーダカバー17と突出部4aとの間に配置され、突出部4aとエンコーダカバー17との間に形成される隙間部22を覆う密閉部材22とを備える。
(もっと読む)
ロータリーエンコーダ付きモータおよびモータ
【課題】符号パターンのパターン中心と出力軸の回転中心との同心度を容易に確保できるロータリーエンコーダ付きモータを提供する。
【解決手段】発光素子11から出射された光が符号パターン5を経由して受光素子12に入射することにより、出力軸3の回転量が検出されるロータリーエンコーダ付きモータ1であって、符号パターン5は、そのパターン中心が出力軸3の回転中心に一致するように出力軸3に形成されている。これにより、ロータリーエンコーダ15として機能させるのに必要な中心合わせ作業が1工程で足り、符号パターン5のパターン中心と出力軸3の回転中心との同心度を容易に確保できる。
(もっと読む)
光学式検出器を備えたギアードモータ
【課題】出力軸に対し発光素子と受光素子との組み付け精度が向上した光学式検出器を備えたギアードモータの提供。
【解決手段】ギアードモータはギアードモータ本体10のボックスカバー13の端面より外方へ突出した出力軸14と出力軸14が外方へ突出するようにボックスカバー13に取付けられたセンサーカバー22とこのカバー22内に取付けられた光センサー23を有し、光センサー23は出力軸14のD形カット面14aを反射面とする発光素子及び受光素子を内蔵したフォトカップラー23aを搭載するフレキシブル基板23cとこの基板23cを保持するセンサーホルダ23dを有し、センサーホルダ23dはボックスカバー13の端面より突出したラジアル軸受部15に外嵌する嵌め輪部23eとボックスカバー13のリブ16bに係合して出力軸周りに回り止めする位置決め部23f,23gを有する。
(もっと読む)
反射型エンコーダ及びモータ
【課題】ガラス基板を使用せずに目盛りパターンを形成することが出来る反射型エンコーダを提供すること。
【解決手段】発光素子18からの光を反射させて受光素子19で検出するようにした反射型エンコーダ10であって、平面部自体を反射面12にした金属基板(ハブ11)と、前記反射面に形成した目盛りパターン14とを備える。
(もっと読む)
多自由度電動機及び多自由度電動機の回転制御方法
【課題】球体ロータを自由に回転できるようにする。
【解決手段】球体ロータを回転させるときは、球体ロータのグレースケールの画像を2値化し(ステップS103)、球体ロータの突極に相当する画像をマーカとして抽出し、その面積重心位置から3次元座標を算出する(ステップS104)。球体画像の中心に最も近い基準マーカとその周囲の周回マーカを抽出し、それらの幾何学的な関係から配置パターンとマーカの種類を識別する(ステップS105)。回転中は画像中のマーカのナンバー及び座標を参照して、ナンバーを継承し、又は新たにナンバーリングを行ってマーカを特定し(ステップS106)、球体ロータの回転情報を算出する(ステップS107)。
(もっと読む)
反射照明を使用した光学式位置変換器システムおよび方法
回転制限モータの回転子とともに回転する照明反射器に照明を向ける照明源と、照明源に隣接し照明反射器からの変調反射照明を受ける複数の検出器区域とを含む回転制限モータ用の位置変換器システムが開示される。 (もっと読む)
モータユニットおよび画像読取装置
【課題】モータにおける回転子の回転量の検出精度の向上を図ること。
【解決手段】回転軸401の軸心周りに回転する回転子の回転によって駆動力を発生させるモータ306と、回転軸401に連結されて回転軸401の回転にともなって回転し、回転に際しての回転軸401の軸心を中心とする同一円周上に等間隔で設けられた目盛りを有するスケール402と、スケール402の回転量を検出する光電センサ403と、を備えるモータユニット307において、モータ306と光電センサ403とを支持プレート404によって支持し、スケール402の回転半径を回転子の回転半径以上にした。
(もっと読む)
多自由度アクチュエータの位置検出装置
【課題】小型で且つ回転子の可動範囲を狭めることなく回転子の回転位置を得ることができる多自由度アクチュエータの位置検出装置を提供する。
【解決手段】第1〜第3のローラ7〜9が回転子6の表面に接触すると共に回転子6の回転に伴って回転可能に配置されている。振動子3を駆動することにより、回転子6が回転すると、そのX軸回りの回転成分に応じて第1のローラ7が、Y軸回りの回転成分に応じて第2のローラ8が、Z軸回りの回転成分に応じて第3のローラ9がそれぞれ回転子6の回転運動に従動して回転し、これら第1〜第3のローラ7〜9の回転方向と回転量がそれぞれ第1〜第3の回転検出センサ10〜12で検出されて検出信号が回転位置算出部16に送出される。回転位置算出部16は、第1〜第3の回転検出センサ10〜12からそれぞれ入力された検出信号に基づき回転子6の回転位置を算出する。
(もっと読む)
1 - 20 / 26
[ Back to top ]