
Fターム[5H680CC06]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 原理、現象 (1,634) | 振動波形 (500) | 定在波 (245)
Fターム[5H680CC06]に分類される特許
241 - 245 / 245
圧電アクチュエータ駆動装置、電子機器、その駆動方法、その駆動制御プログラム、そのプログラムを記録した記録媒体
制御回路131は、電源電圧の低下速度が基準低下速度よりも速い場合、すなわち駆動効率が悪く電力消費量が多い駆動周波数で駆動している場合や、何らかの要因によって圧電アクチュエータAが起動できない場合には、所定駆動周波数に戻してから駆動周波数変更を再実行させる。従って、起動失敗を検出するまでの時間が長期化することなく、電源電圧の低下速度に基づいて起動失敗等が即座に判断でき、この判断に要する時間が短縮化されるので、異常の検知から駆動信号の最適化までの処理を迅速に実行することができるとともに、電力消費量を低減して省電力化が実現できる。 (もっと読む)
駆動制御装置、電子機器、電子機器の駆動制御方法、電子機器の駆動制御プログラム、記録媒体
電池200と圧電アクチュエータAとを備えた電子機器1において、駆動開始前の電源電圧をサンプルホールド回路102で保持し、この電源電圧に基づいて基準電圧発生回路103で基準電圧を設定し、制御回路106は、第2比較回路105の比較で電源電圧が駆動停止電圧を下回った場合に駆動停止させ、第1比較回路104の比較で電源電圧が基準電圧を上回った場合に圧電アクチュエータAの駆動を再開させる。従って、電池電圧の状況に対応した間欠駆動により、小さな電源を用いて機器の小型化を促進でき、かつ駆動時間の短縮化を十分に図ることができる。 (もっと読む)
多方向圧電モータ配置
複数の圧電モータ(31、32)の各々の連結部(48)をボディの表面に押圧することによって複数の圧電モータをボディに連結することと、ボディを動かすために表面に平行な(53)力を加えるようにモータの少なくとも一つを制御することと、その連結部が実質的に表面に垂直な(51)振動のみを行うように少なくとも1つのモータを同時に制御することと、からなる、ボディ(23)を動かす方法。 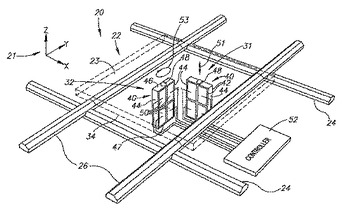 (もっと読む)
(もっと読む)
圧電アクチュエータ
外形寸法の増加を避けつつ、振動振幅が大きく、共振周波数の調整が可能であり、高信頼性を有する圧電アクチュエータを提供する。
圧電アクチュエータは、電界の状態に応じて少なくとも対向する2つの面が伸縮運動をする圧電体3aを有する圧電素子1aと、圧電素子1aを2つの面の少なくともいずれかで拘束する拘束部材21aと、拘束部材21aの周囲に設けられた支持部材4aと、両端の各々を拘束部材21aと支持部材4aとに固定され、拘束される面と略平行な方向に曲げの中立軸を有する複数のはり部材22aとを有する。  (もっと読む)
(もっと読む)
平らに共振する電気機械的駆動ユニット

【課題】電気機械的モータ(1)は、移動させるべき本体(10)の駆動面(14)にほぼ平行に伸びる2つの電気機械的部分(32、34)から構成される駆動素子(30)を備えている。電気機械的部分(32、34)は、固定子(20)の支持体部分(22)の第1の端部(38)に剛性的に支持される。本体(10)の駆動面(14)との相互動作によって本体(10)を移動させる、単一の作動部分(42)を有するリンク部分(40)は、電気機械的部分(32、34)のそれぞれの第2の端部(36)の間に取り付けられる。電気機械的部分(32、34)は移動方向(12)にほぼ垂直なストロークを有する振動モードで励振することができる。リンク(40)の一部またはリンク部分(40)および電気機械的部分(32、34)の間の結合部(46、54)は、ストロークの方向に電気機械的部分(32、34)の自体の曲げ剛性よりも著しく低い曲げ剛性を有している。 (もっと読む)
241 - 245 / 245
[ Back to top ]