
Fターム[5H680CC06]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 原理、現象 (1,634) | 振動波形 (500) | 定在波 (245)
Fターム[5H680CC06]に分類される特許
81 - 100 / 245
振動波モータ及びその製造方法
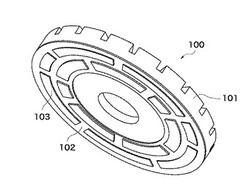
【課題】動波モータとして必要な耐電圧を有する10〜100μm程度の均一的な組成から成る圧電体原材料膜を、安定的に量産可能な少工程にて形成した振動体を有する振動波モータを提供する。
【解決手段】振動波モータは、圧電体(圧電体原材料膜102)に周波電圧を印加して金属製の弾性体101に振動を励起し、圧電体と弾性体101からなる振動体100に接触する接触体を相対的に移動させる。そして、弾性体101の端面に圧電体の原材料微粉末をエアロゾル化した圧電体原材料膜102を噴射し、圧電体を弾性体に直接に成膜形成する。
(もっと読む)
振動アクチュエータ

【課題】小型でありながら正確に回転子の回転位置を測定することができる振動アクチュエータを提供する。
【解決手段】振動体3の駆動により回転子7がX軸回りに回転すると、回転子7と共にジョイント部材12が回転し、スライダ13の突出部14がアーチ状部材8のガイド溝15に案内された状態でスライダ13がアーチ状部材8に沿って移動する。スライダ13に固定されたブラシがアーチ状部材8の第1及び第2の帯部材10及び11の表面にそれぞれ接触しながらスライダ13が移動するため、X軸回り回転位置測定回路17で第1の帯部材10の一端Aから第2の帯部材11の一端Bまでの抵抗値を計測することにより、スライダ13の移動位置、すなわちX軸回りの回転子7の回転位置が測定される。
(もっと読む)
慣性駆動アクチュエータの位置制御方法及び慣性駆動アクチュエータ
【課題】移動体を目標位置に正確かつ迅速に配置できる慣性駆動アクチュエータの位置制御方法等を提供する。
【解決手段】移動量を設定する移動量設定ステップと、移動体の目標位置を設定する目標位置設定ステップと、移動体の相対位置を検出する位置検出ステップと、目標位置と相対位置とを比較する比較ステップと、設定された移動量との比較結果に基づいて、移動手段、第1、第2の電極に印加する駆動電圧パターンを設定する駆動電圧パターン設定ステップと、第1、第2の電極との間に駆動パターン設定ステップにより設定された駆動電圧パターンを印加することで、振動基板移動と同期させながら、両者間に静電気力を作用させることにより、振動基板と移動体との間に生じる摩擦力を制御して移動体の駆動を行う駆動ステップと、を有し、比較ステップから駆動ステップを繰返して移動体を目標位置に移動させる。
(もっと読む)
超音波モータ
【課題】ロータの全円周にわたって同一の回転特性を得ることができる内接型の超音波モータを提供する。
【解決手段】超音波モータ1は、内周面を有するロータ200と、内周面に2の点で接触する超音波振動子11と、超音波振動子11に接続された上側および下側接続部材30および31と、上側および下側接続部材30および31に設けられ、ロータ200を内周面の接線方向に移動させながら、超音波振動子と協働してロータ200の中心の位置を維持し得るように内周面に1点で接触する円盤部材61と、超音波振動子11上の2点および円盤部材61上の1点をロータ200の中心から内周面に向かって押し付けるように上側および下側接続部材30および31を弾性変形させ得る押付機構1000とを備えている。
(もっと読む)
駆動装置
【課題】可動体の位置検出を簡易な構成で実現する。
【解決手段】駆動装置1は、ガイド13,13と、ガイド13,13に対して相対的に移動可能なステージ11と、ステージ11を移動させる超音波アクチュエータ2と、超音波アクチュエータ2を制御する制御装置7とを備えている。超音波アクチュエータ2は、ステージ11に接触する駆動子49,49を有すると共に、ガイド13,13側に取り付けられている。ステージ11における駆動子49,49が接触する面には、凹凸部12が形成されている。制御装置7は、駆動子49,49の接触圧力の変化に基づいてステージ11の位置を検出する。
(もっと読む)
振動アクチュエータ
【課題】配線ケーブルを用いることなく固定子側と回転子側との間で送電または/および通信を行うことができる振動アクチュエータを提供する。
【解決手段】電力供給回路13により固定子2内のコイル12に所定周波数の交流電流を流すと、コイル12の周辺に変化する磁界が発生し、コイル12から固定子2の段差11を経て回転子6内を通り、反対側の段差11から再び固定子2内に入ってコイル12に戻る磁力線Mが形成される。この磁力線Mが回転子6に埋設されているコイル14内を通過し、コイル14に起電力が誘導され、コイル14に接続されている電力利用回路15に電力が供給される。
(もっと読む)
駆動装置
【課題】振動型アクチュエータを備えた駆動装置において出力可能な駆動力の範囲を可及的に拡大して、必要に応じた駆動力を出力できるようにする。
【解決手段】第1及び第2超音波アクチュエータ2A,2Bはそれぞれ、回転体11に接触する駆動子49A,49Bを有すると共に、固定体に取り付けられている。第1超音波アクチュエータ2Aの駆動子49Aと回転体11との間の摩擦力は、第2超音波アクチュエータ2Bの駆動子49Bと回転体11との間の摩擦力よりも大きい。制御装置7は、第1及び第2超音波アクチュエータ2A,2Bを用いて回転体11を駆動する粗動モードと、第2超音波アクチュエータ2Bのみを用いて回転体11を駆動する微動モードとを切り替えて、第1及び第2超音波アクチュエータ2A,2Bを制御する。
(もっと読む)
位置決め制御装置および位置決め制御方法
【課題】超音波モータを用いた位置決め装置に用いられ、移動体を移動プロファイルにしたがって精度よく移動させる位置決め制御装置を提供する。
【解決手段】位置決め装置100において、スライダ50を超音波モータ10による摩擦駆動によって目標位置へ移動させて位置決めするために、位置センサ30bにより測定されるスライダ50の位置データを用いて超音波モータ10を制御する制御装置20は、超音波モータ10の駆動周波数と位置センサ30bによる位置データのサンプリング周波数とのエリアシング周波数の成分を、位置センサ30bにより測定されるスライダ50の位置データからカットするためのフィルタ25を具備する。
(もっと読む)
振動波駆動装置
【課題】異音の発生やリニアスライダの不安定な相対移動の防止を図る。
【解決手段】積層圧電素子3に給電を行うことで、積層圧電素子3に接合された弾性部材1が振動して、リニアスライダ4が相対移動を行う振動波駆動装置において、弾性部材1の積層圧電素子3が接合される側と反対側に、リニアスライダ4に摩擦接触する突起部材2a,2bを設け、さらに、弾性部材1における突起部材2a,2bの周辺に、弾性部材1を貫通する貫通部6a,6bを設ける。こうした構成により、突起部材2a,2bが、弾性部材1の平面方向と垂直な方向に弾性変形することが可能である。そのため、弾性部材1で発生した振動をリニアスライダ4が効果的に受け、リニアスライダ4が飛び跳ねることが防止される。
(もっと読む)
超音波モータおよびその駆動方法
【課題】超音波モータの速度をユーザの要求に合わせて任意に設定できるだけでなくより高速に被駆動体を移動させる超音波モータを提供することを目的とする。
【解決手段】圧電セラミックスを積層してなる矩形平板状の圧電板と、該圧電板の面積の大きい2面を主面、積層面を側面とする圧電板において、前記圧電板の一方の主面に2行2列に形成された4つの駆動電極と、前記圧電板を挟んで前記駆動電極と対向するように前記圧電板の他方の主面に形成された共通電極と、前記圧電板の一側面に設けられ、所定の被駆動体と接触する2つの摺動部材とを具備し、前記摺動部材の設置位置を圧電板の端面からの距離を任意に選択することにより任意の速度を得ることを特徴とする超音波モータ。
(もっと読む)
摩擦駆動アクチュエータ
【課題】装置の複雑化、高価格化を招くことなく、高精度な位置決めが可能な摩擦駆動アクチュエータを提供する。
【解決手段】駆動信号により伸縮する圧電変位部を備え、該圧電変位部の伸縮により励振される振動体と、振動体に接触し、該振動体に対して相対移動を生じる摺動体と、振動体と摺動体とを加圧接触させる加圧部と、を有する摩擦駆動アクチュエータにおいて、振動体と摺動体は、加圧部によって加圧接触された状態で、振動体と摺動体との相対位置の所定の相対移動方向と直交する方向への移動を規制する規制部を、振動体と摺動体との接触位置に、それぞれ有する。
(もっと読む)
振動アクチュエータ
【課題】高い保持力と長い寿命を併せ持つ振動アクチュエータを提供することを課題とする。
【解決手段】振動手段3の駆動停止時には、駆動回路5から変形素子11に電圧が印加されることはなく、したがって変形素子11は伸縮されずに所定の厚さH0を有している。このとき、皿バネ10の付勢力により、変形素子11及び予圧部材12を介してロータ8がステータ2に加圧される。一方、振動手段3の駆動時には、駆動回路5から変形素子11に所定の負電圧が印加され、変形素子11が所定の厚さH0よりも小さい厚さに縮むことにより、皿バネ10の付勢力が小さくなり、その結果、ロータ8のステータ2に対する予圧力が小さくなる。
(もっと読む)
振動アクチュエータ及び該振動アクチュエータを備えた光学機器
【課題】振動子とスライダの接触面に付着した磨耗粉や塵埃等の異物を除去し、耐久性の低下や異音の発生等の不具合を防止する。
【解決手段】(S11)装置の電源投入後に、駆動モード切換回路により駆動を異物除去駆動モードに切換える。
(S12)定在波を発生させることで、振動アクチュエータは振動により振動子、スライダ、レンズ群に付着した異物を除去する。
(S13)駆動モード切換回路により、駆動モードを通常駆動モードに切換える。
(S14)通常駆動により振動アクチュエータを駆動し、レンズ群の基準位置の検出動作を行う。
(S15)基準位置検出センサの出力信号から基準位置を検出及び算出し、レンズ群の位置を絶対値化する。
(もっと読む)
圧電駆動装置、圧電駆動装置の制御方法、電子時計および電子機器
【課題】目標駆動量に対するオーバーランを確実に許容範囲内に収めることができ、駆動制御の精度も向上できる圧電駆動装置の提供。
【解決手段】圧電駆動装置10は、圧電素子を有しこの圧電素子への駆動信号の供給により振動する振動体を備えて前記振動体の振動を被駆動体に伝達する圧電アクチュエータ20と、被駆動体の駆動量を検出する駆動量検出手段70と、圧電アクチュエータ20への駆動信号の供給を制御する駆動制御手段とを備える。駆動制御手段は、圧電アクチュエータ20に予め設定された第1入力エネルギ分の駆動信号を入力した後に、前記駆動量検出手段70によって前記被駆動体が所定の駆動量だけ駆動されたか否かを判定する。
(もっと読む)
振動アクチュエータ
【課題】ロータの回転に伴う摩耗を低減することができる振動アクチュエータを提供することを課題とする。
【解決手段】ステータ2の凹部6内に潤滑剤Gが収容されている。支持部材11に支持された予圧部12はロータ8の表面に当接すると共に、予圧部12の下方に向かって開いた凹部13内にも潤滑剤Gが収容されている。ステータ2の凹部6及び予圧部12の凹部13の内部にそれぞれ収容されている潤滑剤Gにロータ8の表面が接して、ロータ8の表面に潤滑剤Gが付着し、このように潤滑剤Gが付着したロータ8の表面部分がロータ8の回転に伴って移動することにより、ロータ8の表面に接触するステータ2の角部7及び予圧部12の予圧面15にそれぞれ潤滑剤Gが供給される。これにより、ステータ2及び予圧部12とロータ8とのそれぞれの接触部分における摩耗が低減される。
(もっと読む)
超音波モータおよびその駆動方法、超音波モータ装置
【課題】簡単な電源構成で駆動することができ、省スペースで設置することができ、しかも安定に保持することができる超音波モータを提供する。
【解決手段】超音波モータ10は、圧電セラミックスからなる矩形平板状の圧電板11と、圧電板11の一方の主面に2行2列に形成され、対角位置にあるものどうしが電気的に接続されて2組の駆動電極部に分けられた4つの駆動電極12a〜12dと、圧電板を挟んで4つの駆動電極12a〜12dと対向するように圧電板の他方の主面に形成された共通電極と、圧電板11の側面の両端にそれぞれ設けられ、被駆動体50と接触する2つのヘッド13a・13bとを具備する。超音波モータ10にL1モードとB2モードの共振振動を同時に発生させるために、2つの駆動電極部の一方に所定の電圧を印加する。この間、他方の駆動電極部は浮動状態に維持する。
(もっと読む)
振動アクチュエータ
【課題】小型であり且つ単純な構成を有する振動アクチュエータを提供することを課題とする。
【解決手段】ステータ2の角部7に、半球殻形状のロータ8が回転自在に接触配置されると共に、支持部材11によりステータ2上に予圧部12が垂下支持されている。予圧部12は、ロータ8の内部に挿入されてその先端部材13でロータ8の内面9に当接している。予圧部12内に収容されたバネSにより先端部材13がロータ8の内面に圧接されることにより、ロータ8がステータ2に対し加圧されている。振動手段3を駆動することによりロータ8を多軸の回りにそれぞれ回転させることができる。
(もっと読む)
超音波モータを備えた微動機構及び振動体保持機構
【課題】サブミクロンオーダの位置決めを可能にする。
【解決手段】超音波モータを備えた微動機構は、固定台1と、固定台1に対して移動軸方向に移動可能に支持された移動体3と、その移動軸方向に対して平行な平面であって2つの突起部9が設けられた第1の平面と当該第1の平面に対して平行な第2の平面とを有する立体的形状をしており、高周波電圧信号の印加により複数の振動モードを励起する振動体8と、振動体8を固定台1に対して保持する保持部材5とを備え、保持部材5は、振動体8の前記第2の平面の一部と固定され、少なくとも摩擦摺動部又はゴム部材の一方を含む非線形性の高い要素を含まない高剛性材料によって一体的に構成されている。
(もっと読む)
アクチュエータケースおよび超音波モータ
【課題】圧電アクチュエータを簡単な構造で、かつ、その動きを阻害しないように保持するアクチュエータケースとこれを用いた超音波モータを提供する。
【解決手段】L1B2モードで駆動される矩形板状の圧電アクチュエータ10を保持するケース20は、圧電アクチュエータ10を直接に把持する凹型形状の第1ケース部30と、第1ケース部30を嵌挿保持する凹型形状の第2ケース部40と、円柱形状でその中心軸が圧電アクチュエータ10の厚さ方向と平行となり、かつ、その側面の一部が露出するように第1ケース部30の側壁部21aに取り付けられたコマ25を具備する。第1ケース部30の側壁部21bを圧電アクチュエータ10に押し付けると圧電アクチュエータ10は側壁部21aを介して外壁部26aを押圧する。このときコマ25の側面が外壁部26aと接触することで、圧電アクチュエータ10の厚さ方向でのぶれが抑制される。
(もっと読む)
超音波アクチュエータの振動体の製造方法
【課題】複数の圧電変位部を有する超音波アクチュエータにおける振動体の製造方法において、高出力、高駆動効率を安定して得ることが可能な振動体の製造方法を提供する。
【解決手段】電気信号により伸縮する複数の独立して形成された圧電変位部を有し、該圧電変位部の共振により励振される振動体と、振動体に加圧接触され、該振動体に対して相対移動を生じる移動体と、を備えている超音波アクチュエータにおけ振動体の製造方法であって、複数の圧電変位部の基材となる圧電基材を生成する圧電基材生成工程と、圧電基材の一方の面に基板を結合する基板結合工程と、基板結合工程で前記基板が結合された前記圧電基材を加工することにより、複数の前記圧電変位部を前記基板を介して一体化して形成する加工工程と、を有する。
(もっと読む)
81 - 100 / 245
[ Back to top ]