
Fターム[5H680CC06]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 原理、現象 (1,634) | 振動波形 (500) | 定在波 (245)
Fターム[5H680CC06]に分類される特許
41 - 60 / 245
振動波駆動装置
【課題】振動子の駆動振動を阻害せず、摺動面から励振される不要な振動を効果的に減衰させて、鳴きや異音の発生を抑制することが可能となる振動波駆動装置を提供する。
【解決手段】複数の定在波振動の合成によって楕円運動が形成可能に構成された振動子と、該振動子を支持する支持部材を備え、
前記振動子は少なくとも圧電素子と接触部材とからなり、前記振動子の楕円運動によって、該振動子の接触部材と接触する被駆動体を駆動する振動波駆動装置であって、
該振動波駆動装置には振動抑制部材が備えられており、該振動子に励振される前記複数の定在波振動における節円または節線が含まれるそれぞれの節がお互いに交差し重なり合う共通の節の内、
該振動子の支持部分と異なる節に対して前記振動抑制部材が当接するよう設けられた構造を備えている。
(もっと読む)
振動アクチュエータ、レンズ鏡筒、および光学装置

【課題】低速から高速まで安定して動作することが可能な振動アクチュエータと、そのアクチュエータを有するレンズ鏡筒および光学装置を提供すること。
【解決手段】電気機械変換素子104に交流電圧が印加されることにより、振動波が発生する振動部材103と、振動波によって振動部材103に対して相対移動する相対移動部材102と、電気機械変換素子104に前記交流電圧を印加する電圧印加手段22,23,25と、振動部材103と相対移動部材102との相対移動速度に応じて交流電圧の振幅を変化させる制御手段20とを有する振動アクチュエータ。
(もっと読む)
高電圧出力ドライバーおよび圧電ポンプ
【課題】電源立ち上がり時におけるショックの発生を効果的に防止する。
【解決手段】昇圧回路において、低電圧電源の出力を昇圧して高電圧の駆動電源電圧を発生する。また、出力回路では、駆動電源を電源として、圧電素子を駆動する一対の相補的な駆動信号を出力する。出力を停止する前記駆動電源の立ち下がり時において、一対の駆動信号の電位差が0の時点から両駆動信号を一緒にグランドレベルまで変化させる。
(もっと読む)
駆動装置、ならびにこれを備えた撮像装置および電子機器
【課題】小型化した場合であっても、被駆動体を安定して駆動することができる駆動装置を提供する。
【解決手段】被駆動体2を駆動する駆動装置10は、被駆動体2を駆動方向に変位可能に保持する筐体6と、電気的制御により屈曲変位して被駆動体2を変位させる屈曲変位部材5と、筐体6に支持され、かつ屈曲変位部材5の一端を固定端として固定する固定壁6aと、筐体6に固定され、かつ固定壁6aと当接している変位規制部材7とを備えている。これにより、固定壁6aは、変位規制部材7を介して筐体6に保持される。
(もっと読む)
駆動装置の駆動方法
【課題】移動部材の移動をスムーズに行わせること。
【解決手段】伸縮方向で互いに対向する一対の端面を持つ電気機械変換素子(13)と、この電気機械変換素子の一対の端面の一方(13b)に取り付けられた振動摩擦部(14)と、この振動摩擦部と摩擦結合される移動部材(121,122)と、電気機械変換素子(13)の一対の端面の一方(13b)と振動摩擦部(14)の端面との間に配置された振動伝達部材(19)とを備え、電気機械変換素子の伸縮方向に移動部材が移動可能な駆動装置(10)の駆動方法において、電気機械変換素子(13)を鋸歯状波に往復変位させ、この電気機械変換素子の往復変位を振動伝達部材(19)を介して振動摩擦部(14)に伝達させ、それによって、移動部材(121,122)を所定の方向にリニア駆動する。
(もっと読む)
振動型アクチュエータの製造方法
【課題】振動型アクチュエータの製造に際し、部品寸法がばらついても共振周波数のばらつきを抑え、安定した特性の得られる振動型アクチュエータの製造方法を提供する。
【解決手段】電気機械変換素子と軸状部材を接着する接着剤の特性を変更することにより、振動型アクチュエータの共振周波数を調定する振動型アクチュエータの製造方法とする。
(もっと読む)
駆動装置及び光学装置
【課題】圧電アクチュエータの駆動特性を考慮して被駆動部材を精度良く移動させることができる駆動装置及び光学装置を提供する。
【解決手段】圧電素子1に駆動軸2を取り付けたアクチュエータ10を有し、駆動信号により圧電素子を伸縮させ、圧電素子1の伸縮動作に応じて駆動軸2を往復運動させて、駆動軸2に摩擦係合させた被駆動部材3を移動させる駆動装置において、被駆動部材3が移動する移動範囲Z内を複数の領域Z1〜Z10に分割して、被駆動部材3の移動速度が移動範囲Z内で同一となるように、複数の領域Z1〜Z10ごとに駆動信号の波形を変更する制御部81を備えることで、被駆動部材3の摩擦係合位置に依存した速度の違いを小さくすることができる。よって、被駆動部材3の駆動制御を正確に行ない、被駆動部材3を精度良く移動させることができる。
(もっと読む)
圧電素子の駆動装置、超音波アクチュエータ装置
【課題】装置の小型化を阻害することなく、また、装置の複雑化と高価格化を招くことなく、優れた駆動性能を得ることが可能な圧電素子の駆動装置、及び超音波アクチュエータ装置を提供する。
【解決手段】駆動信号により変位する圧電素子の駆動装置において、駆動信号を生成する駆動信号生成部と、駆動信号生成部で生成される前記駆動信号を制御する駆動信号制御部と、圧電素子に流れる電流を時間積算した電流積算値に基づいて、圧電素子の変位量を算出する変位量算出部と、を有し、駆動信号制御部は、変位量算出部で算出された変位量に基づいて、駆動信号を制御する。
(もっと読む)
超音波モータの駆動方法及び駆動装置
【課題】共振周波数の異なる複数の超音波モータを単独駆動及び同時駆動させるための駆動方法及び駆動装置を提供する。
【解決手段】共振周波数の異なる超音波モータA10と超音波モータB20が、駆動装置100の出力に接続される。駆動装置100は、超音波モータA10を単独駆動させる際には「超音波モータA10の駆動可能な周波数の範囲内、且つ超音波モータB20の駆動可能な周波数の範囲外」の周波数を出力し、超音波モータA10と超音波モータB20を同時駆動させる際には「超音波モータA10の駆動可能な周波数の範囲内、且つ超音波モータB20の駆動可能な周波数の範囲内」の周波数を出力し、超音波モータB20を単独駆動させる際には「超音波モータA10の駆動可能な周波数の範囲外、且つ超音波モータB20の駆動可能な周波数の範囲内」の周波数を出力する。
(もっと読む)
振動型モータ制御装置及びそれを用いた光学機器
【課題】 振動型モータを速度制御するにあたり、異音や振動を発生させないために、位相差、周波数、振幅を大きく変化させることのない振動型モータ制御装置の制御方法を提供する。
【解決手段】 位相、周波数、振幅を変化させて前記振動型モータの駆動速度を制御する速度制御手段と、前記駆動速度を検出する速度検出手段とを有し、前記速度制御手段は、前記振動型モータの目標駆動速度と前記速度検出手段により検出した速度に基づいて前記位相差、周波数、振幅の変更量を制限することを特徴とする。
(もっと読む)
超音波モータ
【課題】 温度センサを設けることなく且つ駆動を妨げることなく超音波モータの温度変化をリアルタイムに検出することができる超音波モータを提供すること。
【解決手段】 超音波振動子4に、所定の位相差及び所定の駆動周波数の2相の交番電圧である駆動信号を印加することで楕円振動を発生させ、該楕円振動から駆動力を得て被駆動体5を摩擦駆動する超音波モータ2を、次のように構成する。すなわち、前記超音波モータ2に、前記駆動信号を生成する信号生成回路25と、前記超音波振動子4の振動状態を検出して振動検出信号を生成する外部電極11と、前記信号生成回路25により生成された駆動信号と、前記外部電極11により生成された振動検出信号と、の位相差を検出する位相差検出回路28と、前記位相差検出回路28により検出された位相差に基づいて、前記超音波モータの温度を算出する温度算出手段22と、を具備させる。
(もっと読む)
超音波アクチュエータ
本発明は、長さL、高さH及び厚さtを有する圧電板の形態で超音波モータに好ましく使用される超音波アクチュエータに関するものであり、ここで、上記圧電板は、横方向対称平面Sq、縦方向対称平面Sl、及び少なくとも2つの主面を有し、また、上記圧電板には、上記対称平面Sqに関して対称的に配置された、超音波定常波を発振するための少なくとも2つの発振器が備わっている。本発明によれば、上記圧電板は、少なくとも8つの側方面を含む形状を有し、これらの側方面のうちの少なくとも2つは、駆動される要素と接触するための作動面であり、また、これらの側方面のうちの少なくとも2つは、上記圧電板を保持するための保持面であり、また、残りの側方面は、自由面であり、ここで、少なくとも4つの自由面が、上記縦方向対称平面Slに対して同一の角度αで、且つ/又は、上記横方向対称平面Sqに対して同一の角度φで配置されている。  (もっと読む)
(もっと読む)
リニア駆動装置、振動部材の製造方法、レンズ駆動装置、カメラ及びカメラ付き携帯電話
【課題】歩留まりが高く、製造が容易で、矩形の筺体部分に設置してもデッドスペースを少なくできるリニア駆動装置、振動部材の製造方法、レンズ駆動装置、カメラ及びカメラ付き携帯電話を提供する。
【解決手段】本発明は、振動部材17の振動で駆動軸21が軸線方向に振動することにより、駆動軸21に摩擦接触した移動体3が直線移動するリニア駆動装置において、振動部材17はその輪郭が平面視矩形であり、板状の圧電素子23と、弾性を有する板状の金属製の振動子19とを有し、圧電素子23の一面の全部又は周囲部のみに振動子19が固定してあり、振動子19の他面又は圧電素子の中央部に駆動軸21の基端が固定されており、圧電素子23及び振動子19の輪郭は平面視が矩形面としてある。
(もっと読む)
振動型アクチュエータ
【課題】 振動型アクチュエータの振動体が円形である場合、この振動体に振動を発生させると、移動体との接触部の内周側と外周側とで振動変位の角度に差が生じてしまうため、接触部の面積を広げることができず、高い駆動効率を得ることができなかった。
【解決手段】 移動体と振動体の間に配置される摩擦部材を、振動体に固定される複数の固定部と、前記移動体に接触する接触面が形成された接触部と、前記接触部と前記複数の固定部の間に位置する変換部とから構成する。そして、この変換部を、固定部から延伸した斜面で構成し、かつ、円形の振動体の外周側よりも内周側で斜面の傾斜角度を緩やかに形成する。
(もっと読む)
圧電素子の駆動装置、電子機器、および、圧電素子駆動周波数の制御方法
【課題】回路規模が小さくても実用的に十分な精度で圧電素子に対し共振周波数での駆動を行う。
【解決手段】トランス2と、トランス2の1次側に入力される制御信号CSに追従して周波数が変化する駆動信号DSをトランス2の2次側で発生させ、圧電素子PZに印加する駆動回路3と、コントローラ5とを有する。コントローラ5は、制御信号CSの周波数を所定の周波数範囲FR内で複数回変化させて、当該周波数を変化させるごとに圧電素子PZのインピーダンス変化に応じた検出電位Vdetを検出し、検出電位Vdetの推移に基づいて圧電素子PZの共振周波数frを求める。
(もっと読む)
超音波モータ
【課題】圧電振動子を従来とは異なる辺比で構成した超音波モータを提供する。
【解決手段】矩形型の圧電振動子が、第一次縦振動モードと第二次屈曲振動モードとを組み合わせた多重振動モードで振動することにより駆動力を発生する超音波モータであって、前記圧電振動子が第一次縦振動モードで振動する際の伸縮方向の長さをLとし、前記圧電振動子が第二次屈曲振動モードで振動する際の剪断方向の長さをdとし、d/Lを変数として、d/Lと前記圧電振動子の第一次縦振動モードの共振周波数とを対応させると共に、d/Lと第二次縦振動モードの共振周波数とを対応させた場合、前記圧電振動子は、同一のd/Lの値に対する第一次縦振動モードの共振周波数の値から、第二次屈曲振動モードの共振周波数の値を減算した減算値が、負の数から正の数に変わるときのd/Lの値に基づいて形成されている。
(もっと読む)
振動アクチュエータ、レンズユニット、及び撮像装置
【課題】出力を効率よく高めることができると共に、被駆動部の設計の自由度を広げることができる振動アクチュエータを提供する。
【解決手段】振動アクチュエータ100は、回転軸周りに回転するロータ140と、ロータ140と同軸に配されてロータ140が回転軸周りに摺動可能に挿通された筒型の振れ回り部材120と、振れ回り部材120を振れ回り運動させる駆動部130と、を備え、ロータの回転軸周りに摺動可能に嵌り合う円環状且つ無端状の凸部152及び凹部154をそれぞれ、ロータ140の外周部143と振れ回り部材120の内周部121に備える。
(もっと読む)
駆動装置および撮像装置
【課題】位置検出センサなどの手段を必要とせずに、位置決め制御を行うことができ、部品点数を従来よりも減少させることができる撮像装置を提供すること。
【解決手段】圧電素子13aへの電力の供給の制御を行うマイコン部24と、圧電素子13aに対する電力供給時間と、移動部13cの移動方向とに基づく移動部13cの位置情報を計数して格納するカウンタを備え、マイコン部24は、初期化モードにおいて、無限遠側機械端部15aの位置まで必要十分に到達する電力供給時間で移動部13cを移動させ、カウンタ28を所定の値にリセットした後、移動方向を反転して特定の電力供給時間で移動部13cを移動させた位置を移動制御モードの原点とし、移動制御モードにおいてカウンタ28の情報に基づいて位置決めを行うよう構成する。
(もっと読む)
ピエゾアクチュエータ用駆動回路及び防振制御回路
【課題】ピエゾアクチュエータ用の駆動回路において、移動対象物の目標位置への移動を速やかに行うことと、精度良く行うこととを可能にする。
【解決手段】デューティ比が異なる2種類の駆動パルスPL1,PL2についてのパラメータをレジスタ28に記憶させる。パルス生成回路26は、レジスタ28に格納されたパラメータに基づいて、レンズ8の変位ステップ幅が大きいPL1と、小さいPL2とを切り換え可能に構成される。PL1による粗動により、レンズ8を速やかに移動させることができ、一方、PL2による微動により、レンズ8を目標位置に精度良く近づけることができる。
(もっと読む)
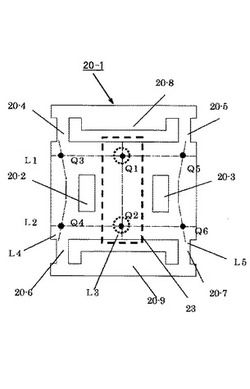
圧電駆動装置
【課題】小型かつ軽量で、駆動特性に優れ、汎用性も高い圧電駆動装置を提供する。
【解決手段】圧電駆動装置10は、弾性を有する固定フレーム12,駆動素子30,ロッド40,ロータ50により構成される。ロッド40は外周面に鍔部46を有しており、一端が駆動素子30の主面略中央に固定される。ロータ50は、筒部52とディスク部56から形成されており、ロッド40に対して回転可能となっている。固定フレーム12の上面部16の内側には、ディスク部56に押圧をかける突起22が設けられる。駆動素子30は、素子の中心を原点として分割された4つの素子構造を組み込んだ構成となっている。駆動素子30に、対角の変位素子部分同士が逆位相,隣接の素子部分間の位相差が90°の交番電場を印加するとロッド40が傾きながら回転し、鍔部46との面接触による摩擦によってロータ50が回転する。
(もっと読む)
41 - 60 / 245
[ Back to top ]