
Fターム[5H680DD44]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 振動子 (4,401) | 振動子の構造 (3,460) | 結合子の構造 (148) | 共振部材 (21)
Fターム[5H680DD44]に分類される特許
1 - 20 / 21
超音波アクチュエータ
【課題】複数の振動子間の調整が不要であり、小型でありながら強い発生力を有するリニア型超音波アクチュエータを提供する。
【解決手段】厚み方向に分極された第1圧電体、第1圧電体と対向するように配置され、厚み方向に分極された第2圧電体、及び、第1圧電体と第2圧電体を挟持する第1弾性体と第2弾性体を有し、第1弾性体と第2弾性体による挟持方向に伸縮する駆動部と、駆動部に対して移動可能に配置された複数の移動体と、駆動部に結合され、複数の移動体に対する把持力をそれぞれ調整可能に構成された複数の伝達部と、駆動部の伸縮と伝達部の把持力調整を連動させる制御部と、を備え、複数の伝達部は、挟持方向において駆動部の一方の端部側に配置されるとともに、駆動部の振動の複数の腹位置にそれぞれ配置されている。
(もっと読む)
駆動力発生装置および駆動装置

【課題】簡素且つ小型の駆動装置を提供する。
【解決手段】駆動装置10は、錘20、圧電素子30、ロッド40、被駆動部材50を備える。錘20は、固定壁91に弾性固定される。圧電素子30の伸縮方向に沿った一方端は錘20に固定されている。ロッド40は、圧電素子30の伸縮方向に沿った他方端に固定されている。ロッド40の圧電素子30に固定された端部と反対側の端部は、保持壁92の保持用の穴へ挿通されている。ロッド40には、被駆動部材50が摩擦係合している。錘20には貫通穴22が形成されている。この際、貫通穴22は、圧電素子30に印加する駆動電圧信号の2次高調波と、振動系11の2次共振周波数とが一致するような位置および形状で形成される。
(もっと読む)
アクチュエータの駆動装置ならびにそれを用いる平行移動機構、干渉計および分光器
【課題】被駆動部材となる可動部とそれを駆動する駆動部とを備えて成るアクチュエータをPLL回路で駆動し、機械共振駆動を行わせる駆動装置において、短時間でかつ確実な位相引き込み動作を可能にし、さらに回路規模の増大やコストアップを抑える。
【解決手段】PLL回路のループフィルタ部14aを、位相比較器13の位相比較信号Vpdを平滑化してVCO11へ制御電圧Vcとして与えるLPFとしての機能を実現する積分回路21に、基準電圧源22とリセット手段としての短絡スイッチ23とを設ける。したがって、前記制御電圧Vcは、積分動作に伴い、基準電圧Vrefから共振周波数の目標電圧付近に滑らかに移行するので、オーバーシュートやリンギングの発生がなく、短時間でかつ確実な位相引き込み動作(位相ロックイン)を行うことができる。また、PLLループの外部に、制御信号を掃引するための特別な構成を設ける必要もない。
(もっと読む)
超音波振動子
【課題】単一の超音波振動子で複数のピーク周波数を発生させ得るようにすること。
【解決手段】超音波振動子1において、単一の圧電体2に厚さを変化させた部分を設けていることにより、単一の超音波振動子1で複数のピーク周波数を発生させることができるようにしている。
(もっと読む)
超音波モータ
【課題】この発明は、簡易な構成で、且つ、簡便にして容易なモータ分解・組立を実現し得るようにした超音波モータを提供することにある。
【解決手段】圧電素子10に配したホルダ部材12上に位置規制部材14を積重配置して、ホルダ部材13の一対の突起部131を、位置規制部材14に設けた挿入口142を有した収容部141に押圧軸方向に移動可能に収容し、この圧電素子10上の位置規制部材14上にベース部材15を積重配置して、圧電素子10の駆動子11が被駆動体12上に載置されると、ベース部材15の自重等によりホルダ部材13の突起部131が、位置規制部材14の収容部141に沿って押圧軸方向に移動されて、その駆動子11が被駆動体12に駆動可能に圧接され、この圧接状態からベース部材15と共に、圧電素子10の駆動子11が被駆動体12上から離間されると、ホルダ部材13の突起部131が位置規制部材14の収容部141内に収容された状態で分離されるように構成した。
(もっと読む)
振動型アクチュエータの製造方法
【課題】振動型アクチュエータの製造に際し、部品寸法がばらついても共振周波数のばらつきを抑え、安定した特性の得られる振動型アクチュエータの製造方法を提供する。
【解決手段】電気機械変換素子と軸状部材を接着する接着剤の特性を変更することにより、振動型アクチュエータの共振周波数を調定する振動型アクチュエータの製造方法とする。
(もっと読む)
リニアアクチュエータ
【課題】 部品点数の少ない簡単な構造で圧電素子を用いたリニアアクチュエータを確実に作動させる。
【解決手段】 相互に螺合する第1、第2ねじ部材12,11のうちの第1ねじ部材12の外周に複数の圧電素子13の端部を当接させ、圧電素子13に交流電圧を印加して進行波を発生させると、第1ねじ部材12が第2ねじ部材11に対して回転して軸線L方向に移動する。このとき、捩じりばね14が発生する弾発力で第1ねじ部材12に軸線Lまわりのトルクを付与することで、第1、第2ねじ部材12,11のねじ山を相互に密着させるのと同時に第1ねじ部材12を複数の圧電素子13の端部に押し付ける予荷重を発生させることができるので、最小限の部品点数で圧電素子13により第1ねじ部材13に進行波を効果的に発生させるとともに、その進行波を第1ねじ部材12から第2ねじ部材11に効果的に伝達して第1、第2ねじ部材12,11を相対回転させることができる。
(もっと読む)
圧電素子の駆動装置、電子機器、および、圧電素子駆動周波数の制御方法
【課題】回路規模が小さくても実用的に十分な精度で圧電素子に対し共振周波数での駆動を行う。
【解決手段】トランス2と、トランス2の1次側に入力される制御信号CSに追従して周波数が変化する駆動信号DSをトランス2の2次側で発生させ、圧電素子PZに印加する駆動回路3と、コントローラ5とを有する。コントローラ5は、制御信号CSの周波数を所定の周波数範囲FR内で複数回変化させて、当該周波数を変化させるごとに圧電素子PZのインピーダンス変化に応じた検出電位Vdetを検出し、検出電位Vdetの推移に基づいて圧電素子PZの共振周波数frを求める。
(もっと読む)
圧電アクチュエータ
【課題】圧電素子と他の部品との接続箇所に破断を生じたり圧電素子自体が疲労したりする可能性が低く、高速な送りと精密な位置決めのための送りが共に可能であって、制御回路やアンプの構成も簡便な圧電アクチュエータを提供すること。
【解決手段】略T字型の弾性体7の梁状本体部5の全長に匹敵する間隔をおいて第1,第2の圧電素子PTZ1,PTZ2を相互に略平行な状態で配置した構成を適用し、高速送りに際しては一方の圧電素子のみを振動させて柱状突起6を共振させることで柱状突起6の先端に楕円運動を生起させてスライダ2に送りを掛け、また、微動送りに際しては何れか一方の圧電素子を伸縮させて他方の圧電素子の先端を支点に弾性体7を揺動させることで柱状突起6の先端を圧電素子の伸縮方向と交差する方向に移動させてスライダ2に送りを掛ける。
(もっと読む)
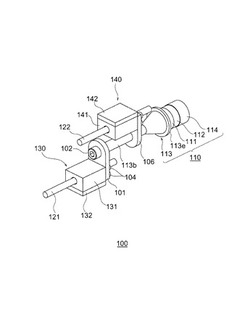
超音波モータ
【課題】駆動が容易で且つ被駆動体に対する固定を容易としつつ、大きなヘッド変位量を得ることを可能ならしめる超音波モータを提供する。
【解決手段】超音波モータ100は、被駆動体に当接させるヘッド11と、駆動電圧が印加された際の伸縮方向が所定角度で交差するようにヘッド11に固定された2個の圧電素子12a,12bと、ヤング率が40GPa以上220GPa以下の材料からなり、圧電素子12a,12bをそれぞれ保持する第1,第2保持部13a,13bおよびこれらを連結する連結部13cとからなる凹型形状の保持部材13を具備する。被駆動体の移動方向に応じて2個の圧電素子12a,12bのいずれか一方が駆動され、その際に保持部材13を含めた共振を利用してヘッド11を動かすことにより被駆動体に力を加えて被駆動体を動かす。
(もっと読む)
超音波カッターおよびその駆動方法
【課題】切削中に刃の振動が停止しにくく、刃の振動が停止したとしても再度刃を振動させることの可能な、超音波カッターの駆動方法を提供すること。
【解決手段】本発明にかかる超音波カッターの駆動方法は、アクチュエータ部に交流電圧を入力して、アクチュエータ部に接続された刃部を振動させる駆動工程を有し、駆動工程では、振動する刃部の軌跡を変化させる。
(もっと読む)
駆動装置および撮像装置
【課題】小型で駆動力が大きくて高効率な駆動装置を提供する。
【解決手段】駆動装置である防振ユニット300は、駆動子321x,322xに楕円振動を生ずるX軸振動子320xと、該X軸振動子を保持する保持部342xを有する固定部材のフレーム302と、前記X軸振動子の前記駆動子が押圧され、前記フレームに対して前記X軸の方向に移動する摺動体330xが固定されているX枠301と、該X枠に設けられた保持部342yに保持されて、駆動子321y,322yに楕円振動を生ずるY軸振動子320yと、前記Y軸振動子の駆動子が押圧され、前記X枠に対してY軸の方向に移動する摺動体330yが固定されているY枠38とを備えており、前記X軸振動子と前記Y軸振動子は略同一の共振周波数をもち、前記摺動体330xと330yは、それらの剛性および密度の内、少なくとも一方が異なる。
(もっと読む)
位置決め制御装置および位置決め制御方法
【課題】移動体を安定した速度で移動させ、しかも高い精度で移動体を目標位置に停止させる位置決め制御装置を提供する。
【解決手段】位置決め装置100においてスライダ50の移動/位置決めを行う制御装置20は、スライダ50を超音波モータ10による摩擦駆動によって所定位置へ移動させて位置決めするために、スライダ50の位置偏差に基づく制御量と速度偏差に基づく制御量を用いて超音波モータ10をPIDフィードバック制御する。制御装置20は、スライダ50を目標位置へ移動させるための移動プロファイルを作成し、移動プロファイルの進行に応じて予めP値,I値,D値が定められた2組以上のPIDパラメータの中から、1組のPIDパラメータを選択し、超音波モータ10を駆動するための制御量を決定する。
(もっと読む)
圧電アクチュエータ
【課題】高密度磁気ディスクに対応した制御帯域の高い位置決め制度に優れたアクチュエータを提供する。
【解決手段】移動機構は、印加電圧に応じて長さ方向の長さが変化する駆動部材と、前記駆動部材よりも短く形成され、前記駆動部材の前記長さが変化する方向と略平行な側面に接着され、前記長さの変化への追従を妨げる補助部材と、前記駆動部材と前記補助部材との相互作用によって回転駆動される被駆動体とを備え、前記被駆動体の外周面上に、前記駆動部材のうち前記補助部材が接着された側面の残存部が固着されている。
(もっと読む)
圧電体振動子
【課題】広い範囲で弾性率を変動させることができる圧電体振動子を提供する。
【解決手段】圧電体振動子は、駆動交流電圧VDが印加される駆動電極17と、調整交流電圧VAが印加される調整電極21とを備える。駆動交流電圧VDの振幅と、調整交流電圧VAの振幅との振幅比が調整され、調整に基づいて、駆動交流電圧VDの印加によって生じた圧電体振動子の駆動振動による歪みは、調整交流電圧VAの印加によって生じた圧電体振動子の調整振動によって増減せしめられる。
(もっと読む)
積層圧電素子及びその製造方法、並びに振動波駆動装置
【課題】駆動部4と非駆動部5から成る積層圧電素子のおいて、焼成や分極による反りを抑制できる積層圧電素子を提供する。
【解決手段】非駆動部5に駆動部4よりも厚さが厚く、広い面積の電極層を設け、場合によりこの電極層を用いて分極し、積層圧電素子の反りを抑制する。その方法として、駆動部4の電極層になる導電ペースに比べ、非駆動部5の電極層になる導電ペーストの導電材料の比率や塗布量を増やし印刷して電極層を形成する。
(もっと読む)
圧電振動体、圧電振動体の固有振動数調整方法、圧電アクチュエータ、および電子機器
【課題】固有振動数の調整を容易に行うことができる圧電振動体、圧電振動体の固有振動数調整方法、圧電アクチュエータ、および電子機器を提供すること。
【解決手段】
縦振動および屈曲振動の混合モードで振動する圧電アクチュエータにおいて、屈曲振動の腹Qの近傍に支持部62が設けられているため、屈曲振動によるモーメントが通常作用する振動部20B外周部に支持部62がありながら、支持部62にはモーメントが殆ど掛からない。このため、支持部62には、縦振動による伸縮変位および屈曲振動による屈曲変位のみが作用するとみなすことができ、第1、第2支持部621,622の少なくとも一方を調整することによって、縦振動の固有振動数と屈曲振動との固有振動数の差を所望の値に調整できる。これにより、共振点に応じた固有振動数の調整を容易かつ迅速に実施できるので、生産性が向上し、低コスト化できる。
(もっと読む)
弾性波アクチュエータ
【課題】より少ない弾性波のエネルギーで圧電性基板上の物体を効率よく駆動する。
【解決手段】励振用電極TRN1の櫛形電極TRN1−1,TRN1−2,TRN1−3は、励振可能なSAWの中心周波数がそれぞれ異なる。物体OBJをX方向における励振用電極TRN2側へ移動させる場合は、信号発生器OSCから周波数f1_3の駆動用の交流信号を出力する。励振用電極TRN1においては、櫛形電極TRN1−3により周波数f1_3のSAWが励振され、このSAWが圧電性基板をX方向に伝搬することで、圧電性基板上の物体OBJがX方向における励振用電極TRN2側へ移動する。このとき、櫛形電極TRN1−1,TRN1−2においては、励振可能なSAWの周波数が入力された駆動用の交流信号の周波数と異なるため、SAWは励振されない。
(もっと読む)
超音波モータの制御方法
【課題】 移動体を、位置偏差を小さくして高精度に移動させることができる超音波モータの制御方法を提供する。
【解決手段】 フィードフォワード制御およびフィードバック制御を併用して超音波モータ10を制御する。フィードフォワード制御では、超音波モータ10を駆動することによって移動する移動体15の移動範囲における超音波モータ10の駆動力の変動を予めデータ化し、実際の超音波モータ10の駆動時には、移動体15の位置情報にしたがって、例えば、速度フィードフォワードゲインを決定するための係数Kvfを、このデータに基づいて変化させる。
(もっと読む)
往復駆動機構及びこれを用いた光学装置
【課題】 往復駆動機構の小型化を図る。
【解決手段】 本発明に係る往復駆動機構は、内ねじ21が形成された筒状の静止体2と、該静止体2の内部に設置されて内ねじ21と螺合する外ねじ31が形成された回転体3と、静止体2の外周面に取り付けられて静止体2に周方向の進行波を発生させるための一対の圧電素子5、6とを具え、該一対の圧電素子5、6は、静止体2に発生する進行波の1/4波長分だけ静止体2の周方向にずれた位置に配置され、該一対の圧電素子5、6に対して互いに90度の位相差を有する交番電圧を印加して、静止体2内で回転体3を回転させる。
(もっと読む)
1 - 20 / 21
[ Back to top ]