
Fターム[5J023DD07]の内容
遅延要素を用いたフィルタ (1,075) | 目的 (224) | 係数制御 (95)
Fターム[5J023DD07]に分類される特許
1 - 20 / 95
適応フィルタ
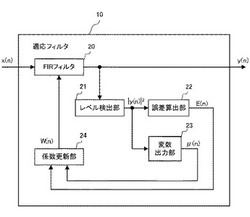
【課題】入力信号の振幅が大きく変化する場合であっても、適切にフィルタ係数の更新量を制御することが可能な適応フィルタを提供する。
【解決手段】
適応フィルタは、入力信号に対して設定されたフィルタ係数でフィルタ処理を施して出力信号として出力するフィルタと、出力信号の振幅と基準振幅との誤差を示す値を算出する算出部と、出力信号の振幅が所定振幅より大きい場合、第1定数をフィルタ係数を更新する際のパラメータとして出力し、出力信号の振幅が所定振幅より小さい場合、第2定数をパラメータとして出力する出力部と、誤差が小さくなるように、誤差を示す値及びパラメータに応じた更新量でフィルタ係数を更新する更新部と、を備える。
(もっと読む)
補償されたベクトル広帯域RF信号を発生する装置

【課題】実質的に平坦な振幅と直線的な位相レスポンスを要する広帯域信号を発生する。
【解決手段】信号発生システムは、入力ラジオ周波数(RF)信号を提供するように構成された入力源と、補償フィルタパラメータを決定するように構成された補償フィルタ計算(CFC)ブロックと、ALCループ情報をCFCブロックに提供するように構成された自動レベル制御(ALC)ループとを含むことができる。補償フィルタパラメータがALC情報の少なくとも一部に基づいて決定される。システムは、また、補償フィルタパラメータの少なくとも一部に基づく補償フィルタを入力RF信号に適用するように構成された予歪フィールドプログラマブルゲートアレイ(FPGA)と、RF出力信号を提供するように構成されたRF出力を含むこともできる。
(もっと読む)
ノイズの多い推定値をフィルタリングして推定誤差を低減するための方法および装置
【課題】ノイズの多い推定値をフィルタリングして推定誤差を低減する。
【解決手段】受信機からの入力サンプルy(k)は、チャネル推定器310およびデータ有限インパルス応答(FIR)フィルタ360に送られる。チャネル推定器310では、初期チャネル推定器320により、基地局と無線デバイスとの間の無線チャネルに対するチャネルインパルス応答推定値(CIRE)が得られ、チャネルIIRフィルタ330が更新され、計算ユニット350によりイコライザ係数が求められる。この係数のデータFIRフィルタ360により、フィルタリングが行なわれる。
(もっと読む)
能動型振動騒音抑制装置
【課題】実際の伝達関数の位相と推定伝達関数の位相とのずれの許容範囲を拡大することができる能動型振動騒音抑制装置を提供する。
【解決手段】前回更新された振幅フィルタ係数に対して、伝達関数の推定値および残留信号に基づき算出される振幅更新式の第一加減算項を加減算すると共に、正弦波制御信号に基づき算出される振幅更新式の第二加減算項を加減算することにより、正弦波制御信号の振幅フィルタ係数を更新する。
(もっと読む)
ループフィルタ
【課題】受信信号にのるノイズが多くなっても、受信品質を保つことができる、光デジタルコヒーレント受信器のループフィルタを提供する。
【解決手段】ループフィルタにおいて、位相回転量ベクタ格納部からフィードバックされる位相回転量ベクタの振幅を調整する振幅調整制御部を設ける。振幅調整制御部は、フィードバックされる位相回転量ベクタの振幅が一定範囲内にあるか否かを判断し、位相回転量ベクタに所定係数を乗算して得られるフィードバック信号に、判断結果に従った係数を乗算して、位相回転量ベクタの振幅を調整する。
(もっと読む)
適応誤差予測フィルタを有する情報通信システム
【課題】無線通信環境下におけるフェージング歪みを補償する適応誤差予測フィルタを有する情報通信システムを提供する。
【解決手段】トレーニング期間においてRLSアルゴリズム、トラッキング期間においてLMSアルゴリズムに切り換えてフィルタ係数を更新する適応等化器において、トラッキング期間における収束特性を改善すべく、従来用いていた適応等化器の前段に適応誤差予測型フィルタを縦続接続し、入力信号の周波数特性を平坦化する効果により、収束特性の改善を実現する。
(もっと読む)
フィルタ係数設定装置、フィルタ係数設定方法、および、画像符号化装置
【課題】符号化対象画像から予測画像を減算した予測残差を符号化する際に、予測によって符号量が増大する可能性を低減する。
【解決手段】ループフィルタ部120は、復号画像Dec’に作用する適応フィルタ122のフィルタ係数の値を設定するフィルタ係数設定部123を備えている。フィルタ係数設定部123は、特定のフィルタ係数を特定の値に拘束するという拘束条件の下で、上記特定のフィルタ係数以外のフィルタ係数の値を、適応フィルタ122から出力される復号画像Dec”の原画像Orgに対する誤差を最小化するように設定する。
(もっと読む)
ディジタルフィルタの係数設定方法、係数設定装置、及び係数設定プログラム、並びにディジタルフィルタを用いた音場補正方法
【課題】音場補正を行うディジタルフィルタの係数配列を少ない演算量で偶対称に設定できるディジタルフィルタの係数設定方法、係数設定装置、及び係数設定プログラム、並びにディジタルフィルタを用いた音場補正方法を提供する。
【解決手段】測定音を集音したマイクロフォンから出力される応答信号の信号値を標本化するステップS11と、測定音を出力したスピーカへ音声信号を出力するディジタルフィルタの基準係数を、基準信号値に設定するステップS04と、ディジタルフィルタが基準係数を用いて演算処理する音声信号よりも、所定時間だけ前の音声信号に対する演算処理で用いられる第1係数と、所定時間だけ後の音声信号に対する演算処理で用いられる第2係数とを、基準係数に設定された信号値の標本化時刻よりも所定時間だけ前又は後の時刻において標本化された信号値の反数(つまり、補正済歪信号)に設定するステップS05と、を有する。
(もっと読む)
適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法
【課題】複数の共振を抑制するよう自動的にノッチフィルタ群を調整する。
【解決手段】適応ノッチフィルタ10は、制御系において直列に配置されており、第1ノッチフィルタMNF1及び第2ノッチフィルタMNF2を少なくとも含む複数のノッチフィルタと、複数のノッチフィルタの中心周波数及びノッチ幅を含むパラメタを調整するためのパラメタ調整部AFと、を備える。パラメタ調整部AFは、第1ノッチフィルタMNF1及び第2ノッチフィルタMNF2の一方の中心周波数が調整されたときの他方のノッチフィルタとの重なり具合を小さくするように、第1ノッチフィルタMNF1及び第2ノッチフィルタMNF2の少なくとも一方のノッチ幅を狭くすることを特徴とする。
(もっと読む)
データ受信装置および適応等化回路
【課題】回路規模を抑制し、消費電力を低減する。
【解決手段】複数の受信回路2a〜2dは、伝送線路に接続され、伝送線路からデータ信号を受信する。受信回路2a〜2dは、受信したデータ信号の波形を整形するための等化器を具備している。適応等化回路3は、複数の受信回路2a〜2dの全部または2以上の所定数ずつに対して1つ設けられ、対応した受信回路2a〜2dの等化器の、波形整形をするための等化係数を算出し、対応した受信回路2a〜2dに出力する。
(もっと読む)
デジタル受信装置のフィルタ係数設定方法及びデジタル受信装置
【課題】各受信動作モードにおいて異なるノイズ信号を受信してもそのノイズ信号を除去するためのフィルタ係数の演算及び更新を速やかに行うデジタル受信装置のフィルタ係数設定方法及びデジタル受信装置を提供する。
【解決手段】休止モードの前後の受信動作モードにおいて、受信されるノイズ信号が同じかどうかを演算する相関係数演算部34を設ける。フィルタ制御部33は、ノイズ信号に対するフィルタ部31のフィルタ係数の演算及び更新の学習処理が休止モードとなって途中で中断する場合であって、今回の受信動作モードで受信したノイズ信号と、先の受信動作モードで受信したノイズ信号とが異なる場合、先の受信動作モードで保持されているフィルタ部31のフィルタ係数をリセット状態にし、そのリセットした状態から今回のノイズ信号に対する学習処理が開始される。これによって、学習処理が短時間に終了しノイズ信号を速やかに除去させることができる。
(もっと読む)
適応等化器、適応等化方法及び適応等化プログラム
【課題】入力データの取得状態が頻繁に変化する状況下では、等化性能の維持及び適応等化器を安定させること。
【解決手段】本発明の第1の態様にかかる適応等化器は、時系列に沿って取得され、複数のタップに格納された入力データ列について、タップ毎に対応付けられたフィルタ係数を用いて等化する適応等化器であって、時間の変化に応じて、過去のフィルタ係数を取り込む度合である調整値をタップ毎に算出する調整値算出部と、調整値に基づいて、新たなフィルタ係数をタップ毎に算出するフィルタ係数算出部と、を備え、調整値算出部は、複数のタップの内、フィルタ係数の絶対値が最大となるべきセンタタップ付近のタップにおける調整値に比べて、当該センタタップ付近以外のタップにおける調整値を、直前の時刻における調整値に対する変化量が大きくなるように算出する。
(もっと読む)
等化器およびフィルタ回路切り替え方法
【課題】
従来は、等化器のフィルタ回路が固定されていたので求められる特性に応じてフィルタ構成を柔軟に変えることができなかった。
【解決手段】
本発明では、遅延タップの接続を切り替えることにより複数のフィルタ形状を実現可能なフィルタ回路と、フィルタ回路の出力信号と出力信号の期待値との誤差を求める誤差計算回路と、誤差が減少する方向にフィルタ回路のフィルタ係数を所定のアルゴリズムにより更新し、フィルタ回路に設定する係数計算回路と、複数のフィルタ形状の中から順番にフィルタ形状を指定し、フィルタ形状毎に誤差計算回路が収束時の誤差および収束時のフィルタ係数を取得し、フィルタ形状毎に取得した複数の誤差を比較して相対的に小さい誤差に対応するフィルタ形状を選択すると共に選択したフィルタ形状に対応する収束時のフィルタ係数をフィルタ回路に設定する制御回路とを有する。
(もっと読む)
周波数特性補償装置
【課題】簡易な手法により前置増幅器を制御する方法とそれを具現化してなる装置とを提供すること。
【解決手段】周波数特性補償装置の備える統計情報計算回路50は、A/D変換器20から適応ディジタルフィルタ30に入力されるディジタル入力信号をモニタして、その信号レベル等に関する統計をとり、統計情報を生成する。制御回路60は、統計情報計算回路50から受けた統計情報に基づいて前置増幅器10の入力オフセット調整及び利得調整を行う。
(もっと読む)
PSK信号の適応ブラインド等化方法、イコライザ、および受信器
【課題】より広い範囲に適用可能なmPSK信号のための適応ブラインド等化方法およびそのためのイコライザを提供する。
【解決手段】PSK信号のためのイコライザは、複素共役計算器、等化係数更新器、FIRフィルタを備える。複素共役計算器は、イコライザの所定時刻の出力とその所定時刻より前の時刻の出力との複素共役積を計算する。等化係数更新器は、複素共役積を利用して等化係数を更新する。FIRフィルタは、更新された等化係数を使用して入力信号をフィルタリングする。
(もっと読む)
適応等化器、エコー消去装置及び能動騒音制御装置
【課題】伝達関数の非線形要素の存在による線形要素の同定精度の低下を防ぐことのできる適応等化器を得る。
【解決手段】第1の信号変換部101〜第2の信号変換部106は、周波数領域で表現されたフィルタ係数を保持し、このフィルタ係数に基づいて、対象とする未知システムの入力信号と、未知システムの出力信号から適応化学習を行い、未知システムの伝達関数を同定する。周波数重み処理部107は、非線形歪み特性情報保持部108に保持されている未知システムの非線形歪み特性に関する非線形歪み特性情報を元に、フィルタ処理部102におけるフィルタ係数またはフィルタ係数の更新量に重みを乗ずる。
(もっと読む)
ディジタルフィルタ及びフィルタ係数更新方法
【課題】LMSアルゴリズムの学習ステップサイズに誤差信号、入力信号及び出力信号の相関に関する値を導入して可変とし、高速処理及び高精度な実時間でのフィルタ処理を実現することができるディジタルフィルタ及びフィルタ係数更新方法を提供する。
【解決手段】適応ディジタルフィルタ(ADF)は、目標信号dt 及び出力信号yt の誤差信号et と、入力信号xt との相関係数の絶対値、又は、誤差信号et と、出力信号yt との相関係数の絶対値を求め、求めた絶対値とLMSアルゴリズムにおける学習ステップサイズとを乗算し、乗算結果を用いて入力信号xt に乗算するフィルタ係数ベクトルWt を更新する。
(もっと読む)
適応フィルタ
【課題】準奇対称性を利用することにより、ハーフメモリアルゴリズムに基づく適応フィルタと比較して更に収束速度の向上を図ることのできる適応フィルタを提供すること。
【解決手段】誤差信号出力回路600は、所望信号d(k)とフィルタ出力y(k)の差分である正誤差信号e(k)と、その反転信号である負誤差信号−e(k)の二種類の誤差信号を生成して、適応関数空間回路200に出力する。適応関数空間回路200は、正誤差信号e(k)を受けて、第1更新対象要素を更新すると共に、負誤差信号−e(k)を受けて、第1更新対象要素と準奇対称の関係にある第2更新対象要素を更新する。
(もっと読む)
車載用音響装置
【課題】 車速連動型イコライザとアクティブノイズコントローラを同時に動作させたときにも、アクティブノイズコントローラによる車室内騒音の消音量を考慮した聴感上自然な車室内騒音に対するオーディオ信号の補償をすることができる車載用音響装置を提供する。
【解決手段】 車速に応じてオーディオ信号の特性を変更する車速連動型イコライザ101と、車室内騒音と相関の高いリファレンス信号から騒音抑圧信号を作り出して車室内騒音を抑圧するアクティブノイズコントローラ102と、消音量推定器103とを備え、消音量推定器103はアクティブノイズコントローラ102の出力信号から車室内騒音の抑圧量を推定し、その情報に基づいて車速連動型イコライザの特性を変更する。
(もっと読む)
騒音低減装置
【課題】航空機の座席などにおいて利用者の言葉や利用者が使用する音響装置から発する音などに起因するエコーを抑制できるとともに、周囲の騒音を効果的に低減する。
【解決手段】騒音を検知する複数の騒音源マイクM1〜M4と、騒音源マイクM1〜M4により検知された騒音を制御空間の制御中心において打ち消すための制御音信号を生成させる適応デジタルフィルタ332と、適応デジタルフィルタ332のフィルタ係数を算出するフィルタ係数算出部333と、制御音信号に基づいて制御音を出力するスピーカ340とを備えた騒音低減装置であって、複数の騒音源マイクM1〜M4を制御空間またはその近傍に配置し、フィルタ係数算出部333は複数の騒音源マイクM1〜M4のそれぞれに対して利用者の口元と騒音源マイクM1〜M4との距離d1〜d4に係わる制御係数k1〜k4を設定して検出値の重み付けを行い、制御音を生成する。
(もっと読む)
1 - 20 / 95
[ Back to top ]