
Fターム[5J070AH12]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | CFAR (89)
Fターム[5J070AH12]に分類される特許
41 - 60 / 89
波数推定装置
【課題】従来の波数推定装置では、目標の固有値と雑音の固有値との差が小さくなる低SNRの場合、誤った波数推定を行う問題があった。
【解決手段】目標からの反射信号を、アンテナのビーム指向方向に高利得を得るようビーム合成して、ビーム合成信号をパルス間積分し、パルス間積分信号から目標信号が検出された場合、目標からの反射信号の相関行列を相関行列算出手段で算出し、固有値・固有ベクトル算出手段で固有値・固有ベクトルを算出し、この固有ベクトルにより固有ビーム形成手段でビーム形成して、ビーム形成出力に対しコヒーレント積分手段がコヒーレント積分を行い、コヒーレント積分値を所定の基準で抽出して、波数推定手段で波数を推定する。
(もっと読む)
画像レーダ装置

【課題】目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得る。
【解決手段】目標に対して送信電波を照射するための送信機1及び送受信アンテナ3と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用補助アンテナ4,5および受信機6〜8と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部9と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段11とを備える。
(もっと読む)
レーダ装置
【課題】加速度目標を除去せず、JEMを除去し、目標検出性能の向上したレーダ装置を得る。
【解決手段】送信信号を放射する送信手段2と、目標で反射した受信信号を受信する受信手段4と、受信信号から距離−速度マップを作成する距離−速度マップ作成手段206と、距離−速度マップに対し、目標候補、目標候補との相対距離および相対速度を算出する目標候補検出手段207と、所定時間経過前の過去時刻における距離−速度推定値の範囲を算出する距離−速度推定値算出手段208と、過去時刻に検出された目標候補が、過去時刻における距離−速度推定値の範囲内に存在する場合に、目標候補を目標と判定する目標判定手段209と、目標と判定されなかった目標候補からJEMを判定し、JEMと判定した目標候補および目標と判定された目標候補を除いた第2の目標候補を算出する第2の目標判定手段210とを備える。
(もっと読む)
目標検出装置
【課題】高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路1と、CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路2と、CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路3とを備え、2次元DWT回路の出力に基づき目標を検出する。
(もっと読む)
目標検出装置
【課題】高速目標であっても目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】P通り(Pは正の整数)のパルス繰返し周波数(PRF:Pulse Repetition Frequency)の各々についてドップラ速度を算出し、該算出したP通りのパルス繰返し周波数のドップラ速度のうちのQ通り(Qは正の整数、Q≦P)のドップラ速度が一致した場合に、該ドップラ速度を目標速度と同定する速度同定回路1を備え、速度同定回路で同定された目標速度を用いて受信信号に所定の処理を施すことにより目標を検出する。
(もっと読む)
レーダ信号処理装置
【課題】 パルスドップラーレーダ装置において、ノイズによる誤警報確率を低く抑え、且つ、目標の検出確率確率を向上させた簡易な構成のレーダ信号処理装置を提供する。
【解決手段】 目標からの反射波を受信処理しレーダ装置からの距離毎に受信パルス信号の時系列を出力する受信部と、この距離毎の受信パルス信号の時系列に対しコヒーレント積分を施し距離毎の受信データの周波数系列を算出する信号処理部と、この距離毎の受信データの周波数系列に対し周波数成分ごとにCFAR処理を施し検出スレッショルド以上のS/N比を持つ受信データの周波数系列を検出する信号検出部と、この検出された受信データの周波数系列の周波数方向の相関性に基づき前記受信パルス信号の時系列が前記目標からの反射波によるものか雑音によるものかを判定するフィルタ相関部とを備えた。
(もっと読む)
レーダ装置
【課題】処理負荷を低減できるレーダ装置を得る。
【解決手段】周波数の異なる複数のパルスを送信する多周波発信型送信機1及び送信アンテナ2と、受信アンテナ4からの受信パルスに帯域制限等を施して受信信号を出力する受信機5と、A/D変換器6からのディジタル信号から目標のドップラー周波数を推定し目標信号成分を検出する目標検出処理部7と、ドップラー効果により回転した目標信号成分の位相を補正するドップラー補正処理部8と、ドップラー補正処理部8からの受信信号を蓄えるメモリ回路9と、メモリ回路9からの受信信号に基づき送信周波数方向における受信信号間の相関行列を生成する相関行列生成処理部12と、相関行列に基づきMUSIC法により目標の測距値を求めるMUSIC処理部13と、測距値に基づき目標信号成分を信号再構成し目標の測角値を求める信号再構成併用型高精度測角処理部11を設けた。
(もっと読む)
レーダ装置
【課題】気象クラッタのドップラー周波数を高精度に測定し、気象クラッタを適切に抑圧することができるレーダ装置を提供する。
【解決手段】パルス信号の送受信によって目標物を検出する装置であって、低周波受信パルス信号から気象クラッタを検出し、気象クラッタのドップラー周波数および強度を出力する気象クラッタ検出部6と、ビーム走査毎に、ドップラー周波数に対する折り返し補正処理を実行し、第1補正後ドップラー周波数を出力する第1折り返し補正部8と、ビーム走査間で、第1補正後ドップラー周波数に対する折り返し補正処理を実行し、第2補正後ドップラー周波数を出力する第2折り返し補正部10と、第2補正後ドップラー周波数に対する平均化処理を実行して、ドップラー周波数平均値を出力する平均処理部12とを備えたものである。
(もっと読む)
目標検出装置
【課題】高速移動する小目標を確実に検出できるとともに、処理規模を小さくして目標検出を高速化できる目標検出装置。
【解決手段】受信信号をレンジセル毎にPRI方向にコヒーレント積分またはノンコヒーレント積分する積分回路1と、積分回路で得られた積分値の最大値からP番目(Pは正の整数)までの極大値となるレンジセルを抽出するレンジセル極大値抽出回路2と、レンジセル最大値抽出回路で抽出されたP個のレンジセルの各々について、その回りのK個のレンジセルからM通り(Mは正の整数)の積分系列を抽出する積分系列抽出回路3と、積分系列抽出回路で抽出されたM通りの積分系列の各々についてコヒーレント積分するコヒーレント積分回路5と、コヒーレント積分回路で得られた積分値の最大値を抽出する最大値抽出回路6と、最大値抽出回路で抽出された最大値に基づき目標を検出する検出回路8を備える。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】目標をそのドプラ速度によらず検出することの可能なレーダ信号処理装置を提供すること。
【解決手段】CPIごとに算出される目標のドプラ速度から次回のCPIにおける目標の速度を予測する。この目標速度が0でない限りにおいては受信Iチャネル、Qチャネル信号をMTI処理部3に与えてクラッタ除去処理を行うが、予測された目標速度が0であれば、処理切替スイッチ1,2を切り替えることによりMTI処理部3を切り離し、受信Iチャネル、Qチャネル信号を0ドプラフィルタ処理部5に接続する。
(もっと読む)
目標検出装置
【課題】高速目標が小目標で積分数が少ない場合であっても、その小目標を確実に検出し、目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】受信信号のレンジセル−PRI(Pulse Repetition Interval;パルス繰り返し周期)軸上で複数の積分系列を抽出する積分系列抽出回路2と、積分系列抽出回路で抽出された複数の積分系列の各々を積分する積分回路3と、積分回路で積分することにより得られた複数の積分系列の積分値の最大値を抽出する最大値抽出回路4と、最大値抽出回路で抽出された最大値に基づき目標を検出する検出回路6とを備える。
(もっと読む)
目標検出装置
【課題】高速目標が小目標であっても、その小目標を確実に検出し、目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】外部から入力された受信信号をレンジセル毎に短時間フーリエ変換することにより時間−周波数軸上の信号に変換する短時間フーリエ変換部1と、短時間フーリエ変換部における短時間フーリエ変換によって得られたレンジセル毎の時間−周波数軸上の信号を2次元フーリエ変換する2次元フーリエ変換部2と、2次元フーリエ変換部における2次元フーリエ変換によって得られた信号を所定のスレショルドレベルと比較するスレショルド部4と、スレショルド部における比較結果に基づき目標を検出する検出部5とを備える。
(もっと読む)
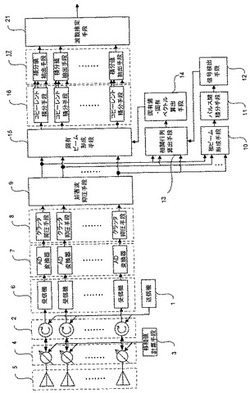
3次元高度探知鳥類レーダー用装置および方法
高度探知3次元鳥類レーダーは、アンテナの指向仰角を変更する手段を備える方位角スキャンレーダーを備えている。仰角の変更は、多重ビームを備えたアンテナを用いるか、仰角方向走査手段を用いるか、異なる仰角を指向する2つのレーダーを用いることにより行える。異なる仰角で放射されたビームで探知された鳥などのターゲットからの受信反射波の解析により、ターゲットの高度が特定される。 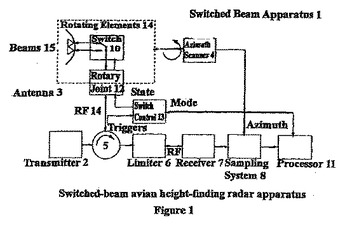 (もっと読む)
(もっと読む)
レーダ装置
【課題】MTI処理による追尾目標の探知においてブラインド速度領域にある探知困難な移動目標が存在した場合にも、初探知を含め探知・追尾を容易に行えるようにする。
【解決手段】目標の探知を探索走査時にはビデオ積分処理系行い、また追尾走査時にはMTI処理系で行うようにし、処理系のビデオ信号にプロット生成処理、目標の予想位置、速度の算出を行い、目標情報作成・管理部により、速度が閾値を超えた目標を追尾の対象目標として抽出して目標情報を作成すると共に、ブラインド速度領域に入る速度を持つ対象目標を抽出し、追尾PRF算出部により当該対象目標の速度のドップラ周波数を算出し、当該ドップラ周波数の1/2程度の値を追尾ビームの送信PRFとして算出して励振受信部に与える。
(もっと読む)
目標自動検出処理方法および装置
【課題】目標からの反響信号の認識率を確保した上で、ノイズ信号に対する誤警報率を低下させて、トータルとしての自動目標検出性能を向上させる。
【解決手段】認識率向上のために受信信号から生成したスペクトルパターンの重心補正処理を行う前に、重心補正の要否を判定する処理を追加し、本来重心補正が必要ないデータに対しては重心補正しないようにする。重心補正の要否はスペクトルレベルの分布度合いを考慮して決定する。そのため、送信信号と相関のある領域内を指定範囲として事前設定しておき、目標からの反響音の可能性のある信号は指定範囲内に沿った形で高スペクトルレベルを持つが、ノイズ信号は指定範囲内に添う形で高スペクトルレベルが分布しないことに着目して、この指定範囲内でスペクトルレベルのヒストグラムを作成し、あるレベル以上のスペクトル分布の合計値が閾値を越えるかどうかで重心補正の要否を判定する。
(もっと読む)
レーダ装置の信号処理方法およびレーダ装置
【課題】CFAR処理などを用いた目標検出処理を行うレーダ装置において、誤目標の発生確率を抑制すること。
【解決手段】Mainアンテナによる受信信号の振幅値(Main振幅)と受信ノイズの振幅値(Mainノイズ)との比として定められる第1被判定値を所定第1の閾値と比較する第1ステップと、Main振幅とGuardアンテナによる受信信号の振幅値(Guard振幅)との比として定められる第2被判定値を所定第2の閾値と比較する第2ステップと、Guard振幅とGuardアンテナによる受信ノイズの振幅値(Guardノイズ)との比として定められる第3被判定値を所定第3の閾値と比較する第3ステップとを含み、第1ステップによる比較判定結果が所定第1の閾値を超えている場合に、第2ステップによる比較判定結果が所定第2の閾値を超えることなく且つ第3ステップによる比較判定結果が所定第3の閾値を超えている場合に検知対象物を真の目標として判定するのを保留する。
(もっと読む)
パッシブ測角装置およびパッシブ測角方法
【課題】超分解能測角法の精密測角適用範囲を制限し演算負荷を抑え応答速度を高めたパッシブ測角装置とその方法を提供する。
【解決手段】受信アンテナ1および受信機2を制御し、電波放射源捜索過程で捜索範囲が所定角度ステップで分割され各角度ステップが所定周波数ステップで分割された各周波数ステップ毎の受信信号を得て、信号処理装置3で受信機からの各角度ステップの各周波数ステップ毎の受信信号中の電波放射源からの放射信号に基づき電波放射源の測角を行い、受信機からの受信信号中の電波放射源の放射信号の特性を評価し各角度ステップの各周波数ステップ毎に電波放射源が検出対象か否かを示す放射信号の特性情報を生成する手段6、受信機の受信信号を受け前記特性情報に基づき検出対象の電波放射源からの放射信号か否かを考慮して受信信号中の放射信号の電波放射源の測角を行う手段4を含む。
(もっと読む)
レーダ情報処理装置
【課題】個別レーダは極力小型軽量の装置規模を維持しながら、目標の航跡位置情報の信頼性向上を可能にする。
【解決手段】各レーダと目標との相対距離に応じてS/Nウェイト係数を算出するS/Nウェイト計算部と、各レーダと目標との相対位置に応じて位置ウェイト係数を計算する位置ウェイト計算部と、当該装置の自己位置を標定する自己位置標定部と、スキャンごとに各レーダから受信した目標の位置情報のそれぞれに対して、算出されたS/Nウェイト係数および位置ウェイト係数を乗じ、ウェイト付けされた位置情報を合成し、合成された位置情報を当該装置の自己位置に基づいて絶対的な目標位置に変換する位置計算部を備え、位置計算部で算出された前後のスキャン時の絶対的な目標位置に基づいて追尾処理を行う。
(もっと読む)
レーダ装置
【課題】一定誤警報確率で物標を探知するレーダ装置において、OS−CFARよりソート規模を小さくし、OS−CFARとほぼ同等の機能を実現するとともに、点在する物標と局在するクラッタを識別し、点在する物標のみを選択的に探知すること。
【解決手段】ブロックごとに平均して取り出したNb個の平均値を小さい順に並べ替え、その並べ替えた平均値の規定位置 (小さい順のm番目) の値をしきい値算出に用いて、
OS−CFARのしきい値とほぼ同様なしきい値を得る。
(もっと読む)
移動目標検出装置、移動目標検出方法および移動目標検出プログラム
【課題】SAR画像に対する移動目標検出処理において、信号レベルの高い移動目標以外の静止目標を除去し、移動目標の誤検出を減らすことを目的とする。
【解決手段】移動目標検出装置100は移動目標検出部150が抑圧比算出部152を備えることを特徴とする。画像差分処理部140は時刻tにレーダ観測された受信信号の振幅値を示すSAR画像Aと時刻t+Δtにレーダ観測された受信信号の振幅値を示すSAR画像Bとの振幅差を目標分布図として算出する。抑圧比算出部152は目標分布図をSAR画像AとSAR画像Bとのいずれかで除算した抑圧比を算出する。目標識別部153は抑圧比を閾値と比較して移動目標を検出する。移動目標検出装置100は抑圧比を閾値と比較することにより、目標分布図を閾値と比較するよりも容易に移動目標を検出することができ、移動目標の誤検出を減らすことができる。
(もっと読む)
41 - 60 / 89
[ Back to top ]