
Fターム[5J070AH34]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 位相検波 (373)
Fターム[5J070AH34]に分類される特許
361 - 373 / 373
車載電波パルスレーダ装置
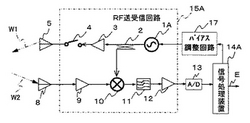
【課題】RF送受信回路の異常状態を安価で且つ小型な回路を用いて高い信頼性で検出可能な車載電波パルスレーダ装置を得る。
【解決手段】送受信信号W1、W2に基づいて被検出物体7までの距離dを算出する信号処理装置14Aは、送信信号W1の周波数可変手段17と、RF送受信回路15Aの異常判定手段とを含み、周波数可変手段17は、送信信号W1の周波数を所定範囲内で変化させて、RF送受信回路15A内の漏れ波の位相状態を強制的に変化させ、異常判定手段は、通常時の受信信号に基づいて学習された正常レベル変動幅と、漏れ波の位相状態が変化したときにIF受信信号のDC成分として観測される漏れ込みレベル変動幅とを比較し、正常レベル変動幅と漏れ込みレベル変動幅との差分に基づいて、RF送受信回路15Aの異常信号Eを生成し、車両の制御システムに対して異常通知を行う。
(もっと読む)
FMCW距離測定装置

【課題】アンテナ(空中線)から目標対象物に照射する信号の周波数帯域に制限がある場合でも、近距離測定において精度の高い距離測定を行う。
【解決手段】周波数変調した搬送波信号を信号分配器4により2分割し、一方を送信信号として空中へ放射し目標対象物7から反射させて受信し受信信号を得、他方を参照信号とし、この参照信号の位相を、1回の測定毎に、360度の間で180度の2分の1以下であって、かつ180度の整数分の1の等間隔角度で0度から位相を変化させる位相器9を通した後、混合器8により受信信号と混合して、ビート信号を生成する。信号処理器12において0度を含め位相を変化させた回数分の実数FFT演算結果の平均を求め測定距離の真値とする。
(もっと読む)
車両周辺監視装置
【課題】 車両周辺の監視を廉価に行うと共に、車両周辺監視の要処理時間を短くすることができること。
【解決手段】 車両1の異なる箇所に搭載した複数台の受信器A0〜D0と、その受信器A0〜D0が受信する電磁波を出力する送信器Eとを配設し、車両1付近に検出対象が存在しない状態で、送信器Eが出力した電磁波を車両1に搭載した受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶させ、送信器Eが出力した電磁波を車両1に搭載した複数台の受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶しているパターンと比較して、車両1の周辺状態を検出する。
(もっと読む)
レーダのアンテナ間位相差検出方法およびアンテナ間位相差検出機能を有するレーダ装置
【課題】 複数本のアンテナが用いられるレーダのアンテナ間位相差を検出する。
【解決手段】 送信信号の変調を停止し、アンテナ10の近傍に反射物を置いたときのミキサ32の出力レベルを各アンテナについて測定して位相値に変換し、それらからアンテナ間の差分を算出する。
(もっと読む)
無線通信システムの質問器
【課題】周囲環境の変化にリアルタイムに対応して相殺波による十分な相殺を行い、高い受信感度を維持する。
【解決手段】無線タグTへアクセスするための搬送波を無線タグTへ送信可能な送信部32と、この送信部32からの送信信号に応じて無線タグTからの送信信号を受信可能な受信部33と、この信号受信時に、送信部32からの送信信号に基づき生じうる不要波を相殺するための相殺波を発生するキャンセル回路200と、この相殺波により相殺された受信部32の受信信号強度を検出するRSSI回路48と、送信部32から変調波を出力し無線タグTへ送信するのに先立ち、搬送波を出力して送信部32から送信し、RSSI回路48での検出結果に応じてキャンセル回路200より発生する相殺波の位相P及び振幅Aを変化させ、最適値を設定するように各キャンセル回路200等を制御する制御回路4とを有する。
(もっと読む)
物標検出装置
【課題】 割り込み物標を高速に検知することが可能な物標検出装置を提供することを目的とする。
【解決手段】 この物標検出装置は、遠距離狭角検出範囲R1を有する第1レーダ100aと、遠距離狭角検出範囲R1に部分的に重複する近距離広角検出範囲R2を有する第2レーダ100bとを備えている。範囲設定手段としてのレーダ100aは、近距離広角検出範囲R2であって且つ遠距離狭角検出範囲R1でない非重複検出範囲R2a内において、第2レーダ100bの出力のノイズレベルが上昇した場合には、このノイズレベル上昇した検出範囲R2aに隣接する遠距離狭角検出範囲R1内の領域Rxを重点的検出範囲に設定して物標検出を行う。
(もっと読む)
物体検出法及び装置
物体の検出方法と装置に関する。1実施例では、保護領域に進入する人物を低パワー偏光電波で照射する。人物から反射される異なる偏光波を収集する。反射信号の多様なパラメータを測定し、これらの多様な選択された相違を計算して隠蔽武器を検出する。これらの相違は時間機能としてプロットされるとパターンを創出する。訓練された人工知能ネットワークパターン認識プログラムを使用してこれらのパターンを評価し、自動的に武器の存在を判定する。 (もっと読む)
距離測定システムならびに方法
問い合わせシステム(300)は、送信器(316)を通じて、第一周波数の問い合わせ信号を送り、受信器(317)を介して第二周波数での応答を受け取る。かかる問い合わせシステム(300)は、回路クロック付きマイクロプロセッサ(310)により制御され、さらに、周波数セレクタ(315)、信号分析器(318)、データリンク(314)およびディスプレイモニタ兼制御パネル(312)を備えている。問い合わせシステム(300)は、受信器(317)で受け取った信号を用いてターゲットとなる距離を算出する。 (もっと読む)
非接触リーダライタ
本発明の目的は、異なる周波数の搬送波を用いた複数の送信信号を送信する送信部と、前記送信部により送信した複数の送信信号に対する返信である複数の返信信号を受信する受信部と、前記返信信号に基づく返信信号の位相データを算出する位相算出部と、前記位相算出部からの位相データに基づいて前記返信信号を返信した物体との距離を算出する距離算出部および/または前記受信信号から得られたベースバンド信号に基づいて、前記ベースバンド信号の周波数成分を算出し、前記周波数成分に基づいて前記返信信号を返信した物体の速度を算出する速度算出部と、前記送信部から送信する送信信号の送信方向を制御する制御部とを備えた非接触リーダライタを提供することである。 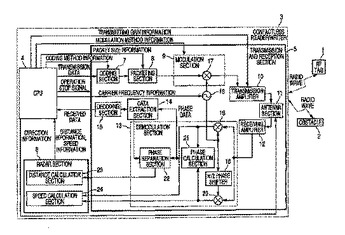 (もっと読む)
(もっと読む)
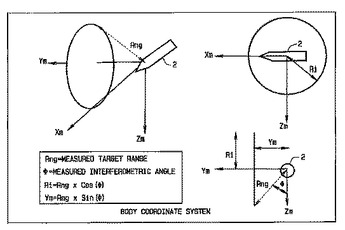
干渉レーダ高度計におけるアンテナ方向を較正するための方法及びその装置
レーダ高度計(10)を較正するための装置(100)が、記述される。高度計は、右(20)、左(16)及び中間アンテナ(18)で受信したレーダ・エネルギーに基づいて目標に対する角度を求める。装置は、レーダが装着されるターン・テーブル(104)と、レーダ高度計の位置を制御するターン・テーブル制御部(106)と、レーダ高度計から送信信号(110)を受け取るレーダ・エネルギー源と、反射体(122)と、較正装置(128)と、を備える。反射体は、レーダ・エネルギー(124)をレーダ源からレーダ高度計に向けて反射し、平行化する。較正装置は、平行化されたレーダ・エネルギーに対するレーダ高度計の位置を示す角度(108)を制御部から受け取り、測定角度(126)をレーダ高度計から受け取る。較正装置は、ターン・テーブルから受け取った角度と高度計から受け取った測定角度との差に基づいて修正係数(72)を計算し、高度計に、較正修正係数を提供する。 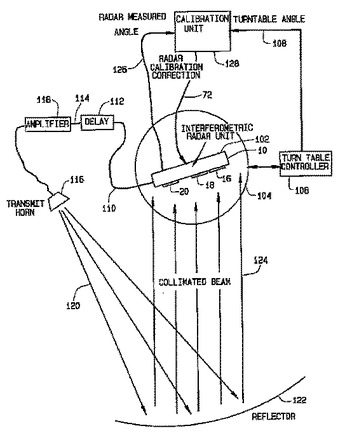 (もっと読む)
(もっと読む)
レーダ戻りデータを重み付ける方法および装置
前記レーダターゲット(48)の位置を決定することにおいて位相レーダエコーからの加算による地勢エコーフェーディングの影響を減少する方法が提供される。この方法は、レーダターゲットの地勢特徴から生じるレーダエコーフェーディングの程度に比例する、干渉角Φへ寄与する地勢特徴の影響を調整することにより、少なくともひとつのレーダエコーに基づきレーダターゲットへの干渉角Φを決定するステップと、干渉角Φをフィルタリングするステップとを含む。訂正された干渉角Φは、フィルタリングの少なくとも一部に基づいて提供される。
 (もっと読む)
(もっと読む)
レーダ装置
【課題】 IQバランスの悪化により、偽スペクトルが発生し、距離,相対速度演算時間が増大するのを防止する。
【解決手段】 送信電磁波を出力する送信手段と、送信電磁波が目標物体で反射されて戻ってきた受信電磁波をIQ位相検波する受信手段と、この受信手段の出力信号を、FFT処理する信号変換手段と、この信号変換手段で変換されたデータの中に周波数の絶対値が同じで正負の両方に振幅レベルのピーク値を持つ一対のスペクトルがあれば、振幅レベルのピーク値の大きい方が真のスペクトルであると判定し、判定された真のスペクトルの周波数を用いて、目標物体との距離,相対速度を演算する信号処理手段とを備えたものである。
(もっと読む)
FMCWレ―ダ装置及び記録媒体
【課題】 移動物と静止物を正確に認識できるFMCWレーダ装置及び記録媒体を提供すること。
【解決手段】 ステッフ゜200では、周波数シフト量の幅を決定する。ステッフ゜210では、周波数シフトを行う。ステッフ゜220では、評価値|Vp|を算出する。ステッフ゜230では、近傍和Sum2を算出する。ステッフ゜240では、スペクトル全体和Sum1を算出する。ステッフ゜270では、全てのスペクトル全体和Sum1の値を比較して、真の周波数シフト量TSnを決定する。ステッフ゜280では、真の周波数シフト量にて周波数シフトしたスペクトルに関し、スペクトルピークの近傍和Sum2が閾値Thp以下か否かを判定する。ステッフ゜290では、移動物予測フラグがセットされているか否かを判定する。ステッフ゜300では、近傍和Sum2が閾値Thp以下で且つ移動物予測フラグがセットされていないので、そのスペクトルピークは静止物のスペクトルピークであると判断する。
(もっと読む)
361 - 373 / 373
[ Back to top ]