
Fターム[5J070AH34]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 位相検波 (373)
Fターム[5J070AH34]に分類される特許
161 - 180 / 373
測定装置および方法
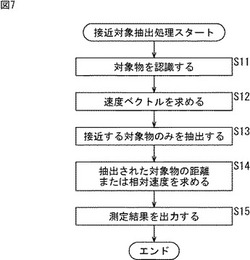
【課題】より少ない演算量で対象物に関係する情報を演算する。
【解決手段】2周波CWレーダ1は、自車の後方あるいは側方にある対象物を認識し(S11)、認識された対象物群を、自車に接近する対象物と、自車から離反する対象物とに判別し(S12)、接近離反の判別結果に基づいて、認識された対象物群の中から、自車に接近すると判別された対象物のみを抽出し(S13)、抽出された対象物との距離Lまたは相対速度vの少なくとも一方を算出し(S14)、測定結果sを出力する(S15)ことで、より少ない演算量で対象物に関係する情報を演算できる。本発明は、対象物を測定する測定装置に適用できる。
(もっと読む)
距離測定装置及び距離測定方法

【課題】高い分解能を有し、正確な測定を実施できる距離測定装置を提供する。
【解決手段】距離測定装置は、時間遅延回路を利用した粗距離測定回路18と、搬送波のベクトルの向きを測定して距離を計測する精密距離測定回路31とを有し、これらの和が最終出力となる。粗距離測定装置18は、測定スパンが長いが精度が低い。精密距離測定装置18は、測定スパンが短いが精度が高い。これらの組み合わせにより、測定スパンが長く、高い分解能を有し、正確な測定を実施できる距離測定装置とすることができる。
(もっと読む)
降雨減衰判定装置及びそれを用いた降雨観測システム並びに降雨減衰判定方法
【課題】 降雨データ取得不能領域を降雨減衰によるものであるか判定する簡易で計算負荷の小さい降雨減衰判定装置及びそれを用いた降雨観測システム並びに降雨減衰判定方法を提供する。
【解決手段】 取得した観測データから減衰係数及び片道経路積算減衰量を計算する減衰演算手段311と、大気減衰等から最小受信感度を計算する最小受信感度演算手段312と、あらかじめ設定した検知限界降雨強度から検知限界反射強度を計算する検知限界演算手段313と、減衰演算手段311、最小受信感度演算手段312及び検知限界演算手段313で求めた値を比較した結果から検知不能領域を推定する検知不能領域推定手段314と、を備えたことを特徴とする。
(もっと読む)
解読装置
【課題】二次監視レーダ装置から送信されたモードS信号を正確に復調(解読)する。
【解決手段】モードS質問信号を位相データと振幅データとに変換する変換部14と、振幅データに基づいて、モードS質問信号のP1パルスまたはP2パルスの立上がりまたは立下りの少なくともいずれかのタイミングを検出するパルス検出部15と、検出されたタイミングに基づいて、P6パルスの立上がりのタイミングを特定するとともに、P6パルスの立上りから同期位相反転位置までの位相データをモードS質問信号の位相のずれ量として検出する位相検出部16と、同期位相反転位置からP6パルスの終了までの位相データに対し、位相のずれ量分の補正を施す補正処理部17と、ずれが補正された位相データを復調することで質問データを解読する復調処理部19とを備えている。
(もっと読む)
合成開口レーダ及びコンパクト・ポラリメトリSAR処理方法、プログラム
【課題】汎用型の垂直・水平偏波共用フェーズドアレイアンテナを利用して、コンパクト・ポラリメトリSARを簡単に実現する合成開口レーダを提供する。
【解決手段】アンテナ部が、送受信モジュール毎に送信偏波を水平偏波又は垂直偏波に切替可能であって、水平偏波と垂直偏波の2つの偏波で同時に受信可能な垂直・水平偏波共用フェーズドアレイアンテナである。制御系が、送信時に前記フェーズドアレイアンテナをエレベーション方向に電気的に分割して、その一方を水平偏波送信、残りを垂直偏波送信に設定し、受信時に水平偏波と垂直偏波の2偏波同時受信に設定する。SAR処理装置が、複素データである水平偏波受信データと垂直偏波受信データとをターゲットベクトルとして取扱い、フルポラリメトリのターゲットベクトルの共分散行列に相当する演算結果を得ることでポラリメトリSAR処理を行う。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】目標をそのドプラ速度によらず検出することの可能なレーダ信号処理装置を提供すること。
【解決手段】CPIごとに算出される目標のドプラ速度から次回のCPIにおける目標の速度を予測する。この目標速度が0でない限りにおいては受信Iチャネル、Qチャネル信号をMTI処理部3に与えてクラッタ除去処理を行うが、予測された目標速度が0であれば、処理切替スイッチ1,2を切り替えることによりMTI処理部3を切り離し、受信Iチャネル、Qチャネル信号を0ドプラフィルタ処理部5に接続する。
(もっと読む)
レーダ装置
【課題】複数のレーダ画像の投影面が一致しない場合にも、目標の高分解能画像を生成することが可能なレーダ装置を得る。
【解決手段】複数の異なる位置に配置され、目標を観測する複数のレーダと、複数のレーダで得られる受信信号スペクトルの投影面を一致させる処理を行う投影面補償手段19と、複数のレーダで得られる受信信号スペクトルの位相を一致させる処理を行う相互コヒーレント化手段3と、相互コヒーレント化手段で位相を一致させた受信信号スペクトルを、レンジ方向またはクロスレンジ方向に内挿または外挿して帯域幅を拡張した連続スペクトルを生成する帯域拡張手段4と、帯域拡張手段で生成された連続スペクトルのレンジとクロスレンジをそれぞれ圧縮する圧縮手段5及び6とを備える。
(もっと読む)
レーダ装置
【課題】目標検出性能を低下させることなく2次エコー抑圧処理を行うことのできるレーダ装置を得る。
【解決手段】送受信部と、信号処理部とを備え、信号処理部は、受信信号に対して送受信部から一定時間前に送信された送信波の位相を打ち消すように位相補正を施す第1の位相補正部7と、第1の位相補正部7による位相補正後の受信信号において、電力の卓越する周波数成分を検出する卓越周波数検出部10と、検出された周波数成分を除去する卓越周波数成分除去部11と、卓越周波数成分除去後の受信信号に対して、第1の位相補正部7による位相補正量の正負を反転させた位相補正量を用いて位相補正を行う再位相変調部13と、送受信部から送信された送信波の初期位相を打ち消すように位相補正を施す第2の位相補正部14と、1次エコー成分の検出を行う1次エコー検出部16とを含む。
(もっと読む)
リーダライタ、及び物品仕分システム
【課題】RFIDタグの配列順序とアンテナに対する移動方向を識別することができるリーダライタを提供する。
【解決手段】このリーダライタ50は、VCO2の出力信号の位相を、基準となる入力信号の位相に同期させるPLL回路1と、PLL回路1の制御電圧に基づいて所定の周波数を発振するVCO2と、VCO2から発信された信号をマイクロ波に変調する変調器3と、マイクロ波の方向により向きを決定するサーキュレータ5と、マイクロ波を発信してタグ7からの反射波を受信するアンテナ6と、sin波を復調するミキサ9と、cos波を復調するミキサ11と、ミキサ9の信号から所定の周波数成分のみを通過するBPF12と、ミキサ11の信号から所定の周波数成分のみを通過するBPF13と、A/Dコンバータ14とA/Dコンバータ16から位相を演算する演算器15と、を備えて構成されている。
(もっと読む)
パルスレーダ装置
【課題】本発明は、パルスレーダ装置に関し、対象物との相対距離又は相対速度を演算するうえで、高い検出精度と遠方における速やかな検出とを両立させることにある。
【解決手段】パルス状の電波を送信する送信手段と、送信手段による送信電波の反射波を受信する受信手段と、を備え、送信手段による電波送信と受信手段による電波受信との関係に基づいて対象物との相対距離又は相対速度を演算するパルスレーダ装置において、対象物との相対距離又は相対速度の演算が要求される要求検出範囲の位置に応じて、送信手段の送信する電波のパルス幅を可変するパルス幅可変手段を備える。
(もっと読む)
モードS二次監視レーダ及び位相判定システム
【課題】送信するモードS質問における信号の内容、位相反転の状態、波形の性能等P6パルス(データブロック)に関する性質を確実かつ容易に確認することができるモードS二次監視レーダを提供する。
【解決手段】航空機に搭載されているトランスポンダ2に対し、DPSKによりデータの位相が反転されたデータブロックを含むモードS質問を送信する送信部121aと、モードS質問の生成するとともに、モードS質問と同期し、モードS質問のデータブロックの位相を反転しない基準信号を生成する生成部112と、モードS質問の位相反転を判定する計測器3に、モードS質問及び基準信号を出力する出力手段121bとを備える。
(もっと読む)
レーダ装置
【課題】一個のパルス内の二点の位相を検出して目標のドップラー速度を検出できるレーダ装置を得る。
【解決手段】送信パルス信号の諸元を設定するパルス諸元設定部1と、諸元に基づきパルス信号を生成するパルス波形生成部2と、生成されたパルス信号を変調信号として、高周波信号をパルス変調して送信信号を生成する送信部3と、送信信号を目標に向けて放射し、反射した信号を受信する空中線部5と、受信された受信信号を低周波のパルス信号へ周波数変換する受信部6と、周波数変換されたパルス信号をデジタル変換するA/D変換部7と、デジタル変換されたパルス信号に対して、諸元に基づき、一個のパルス内において二点の時刻を検出するパルス信号分析部8と、検出された二点の時刻における位相値を検出する位相検出部9と、検出された位相値及び送信信号の波長に基づき、目標のドップラー速度を算出するドップラー速度算出部10とを設けた。
(もっと読む)
レーダ装置
【課題】不要波環境下であっても、処理規模または回路規模を極力大きくせずに、目標の距離および方位を観測できるレーダ装置を提供する。
【解決手段】円開口が形成されるように一方向に配置し、且つ該一方向に直交する方向に開口分割した位相中心の異なる複数のサブアレイを含む1次元DBF(Digital Beam Forming)アレイアンテナ1と、1次元DBFアレイアンテナの複数のサブアレイから送られてくるモノパルス合成前のサブアレイ信号に対して複素ICA(Independent Component Analysis;独立成分分析)を行うことにより、目標信号と不要波信号とを分離するICA処理部2と、ICA処理部により分離された目標信号に基づき距離を計測する測距部5を備える。
(もっと読む)
電波発生源可視化装置及び電波発生源可視化方法
【課題】短時間のみ発射される電波発生源であっても、容易に電波発生源を推定し可視化することができる電波発生源可視化装置を提供する。
【解決手段】到来する電波を、基準のアンテナと、複数のアンテナ素子を含むアレーアンテナとで同時に受信する受信部と、基準のアンテナ及び前記アレーアンテナで同時に受信した信号に対応するデジタルデータを得て、これらデジタルデータの複素振幅値を利用して電波の到来方向を電波ホログラフィ法で推定し波源画像を生成する到来方向推定処理部と、電波発生源と推定される部分の環境を撮影して得た環境画像と波源画像とを合成して表示する表示部とを具備してなる。
(もっと読む)
気象レーダ装置
【課題】種々の降水粒子が混在する観測範囲全域において高い精度の雨量強度の3次元分布を求めることを可能にする。
【解決手段】降水粒子・雨量選択判定部で、観測範囲の各高度のメッシュ毎に偏波間相関ρhvに基づいて降水・非降水を判定し、降水と判定されたメッシュに対しては水平偏波反射強度Zh、偏波間強度比Zdr、偏波間位相差Kdp、偏波間相関係数ρhvおよび遮蔽マップデータに基づいてそれぞれのメッシュが遮蔽領域かを判定し、遮蔽領域の判定結果に対応したメッシュの降水粒子を判定し、当該判定した降水粒子に適した雨量強度の種類または非降水判定結果を表す3次元の雨量強度選択データと降水粒子データを生成し、雨量強度判定部により、この雨量強度選択データに基づいて4種の雨量強度から観測範囲の最終的な雨量強度の3次元分布を算出する。
(もっと読む)
レーダ装置
【課題】目標移動に起因したドップラー周波数を推定し、ドップラー周波数推定値から目標信号の位相回転を補正することにより、推定精度を劣化させることなく遅延時間を推定して、高精度に目標を検出することのできるレーダ装置を得る。
【解決手段】電波を生成する送信機1と、電波を送信する送信アンテナ2と、送信アンテナ2から送信されて目標3で反射された電波を受信波として受信する受信アンテナ4と、受信波の帯域制限および位相検波を行い目標3に対応した目標信号を生成する受信機5と、目標3の移動に起因したドップラー効果による目標信号のドップラー周波数を推定して、ドップラー周波数推定値を求めるドップラー推定処理部と、ドップラー効果による目標信号の位相回転を補正して目標信号の時間遅延を推定する時間遅延推定処理部とを備えている。
(もっと読む)
距離測定装置
【課題】間に障害物があっても距離測定を可能とする距離測定装置を提供する。
【解決手段】第1の送受信機1000から第2の送受信機2000へ、周波数f1/MNの矩形波DTで周波数f1の搬送波をQPSK変調し、送信する。第2の送受信機2000は、コスタスループにより搬送波を再生し、矩形波D2を復調する。この後周波数f2(≠f1)の搬送波を生成して、復調した矩形波で周波数f2の搬送波をQPSK変調し、第2の送受信機2000から第1の送受信機1000へ逆送信する。第1の送受信機1000はここから周波数f1/MNの矩形波DRを復調する。矩形波DRをM逓倍し、矩形波DTを生成する1/M分周器15の入力である1/N分周器14との位相差を検出する。位相差は、第1の送受信機1000から第2の送受信機2000までの距離の2倍を電波が通過した時間差である。
(もっと読む)
測定装置
【課題】ドップラーレーダなどの測定装置において、測定結果の信頼性を正しく判定する。
【解決手段】振幅測定部141は、受信部113が受信した反射波502のピーク時刻における振幅を測定する。参照値測定モードにおいて、振幅測定部141が測定した反射波502の振幅を振幅記憶部151が記憶しておく。高度・速度測定モードにおいて、振幅測定部141が測定した反射波502の振幅と、振幅記憶部151が記憶しておいた反射波502の振幅とを、振幅判定部155が比較し、振幅の差が許容範囲内であるか否かを判定する。振幅の差が許容範囲内であると振幅判定部155が判定した場合、信頼性出力部156は、状態算出部130が算出した測定結果の信頼性が高いことを表わす信号を出力し、振幅の差が許容範囲外であると振幅判定部155が判定した場合、信頼性出力部156は、測定結果の信頼性が低いことを表わす信号を出力する。
(もっと読む)
不要信号抑圧装置
【課題】目標のドップラー周波数が未知の場合でも、別の手段を用いることなく簡易に時空間適応信号処理によりクラッタを抑圧する不要信号抑圧装置を提供する。
【解決手段】不要信号抑圧装置は、移動体に搭載され、レーダの送信アンテナから空中に放射された高周波信号に係り且つ一直線上に等間隔に配置された複数個の素子アンテナ(1)により受信された反射信号に含まれる不要信号成分を抑圧する不要信号抑圧装置において、上記反射信号を受信する方向におけるクラッタのドップラー周波数を拘束から外すような拘束条件下で、上記高周波信号を搬送する搬送波の波長、上記素子アンテナの配置間隔、上記レーダが搭載された移動体の速さ、および上記高周波信号のパルス繰返し周期に基づいて、上記不要信号成分を抑圧する荷重係数を計算する荷重計算部(20)を備えた。
(もっと読む)
追尾復調受信装置および該追尾復調受信装置による誤差信号生成方法
【課題】オーバーシュート無しに素早くアンテナを追尾対象の方向に指向させる。
【解決手段】本発明の追尾復調受信装置は、アンテナから入力された和信号および差信号を基に、アンテナの現角度と目標角度との角度誤差を表す角度成分信号を生成する角度成分信号生成手段と、角度成分信号生成手段で生成された角度成分信号を角度誤差に応じた利得で増幅して誤差信号として出力する可変利得増幅手段と、を有する。
(もっと読む)
161 - 180 / 373
[ Back to top ]